Lego RCX Szín válogató I.
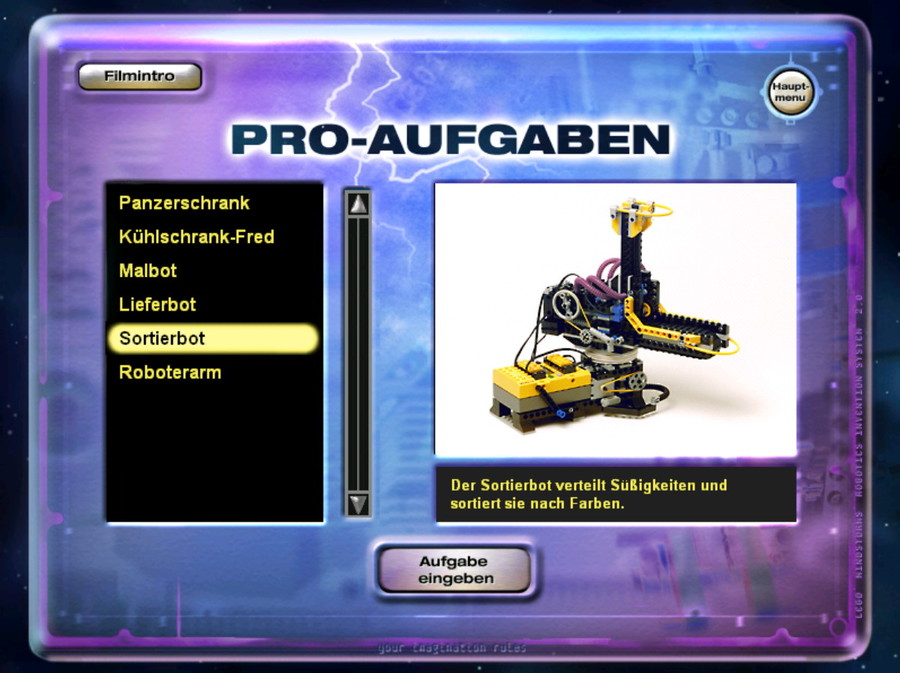
Nálam örök kedvenc az első LEGO Robot készlet, az RCX! Az EV3 keretprogramjában van annyi építmény és tipp, amennyi az RCX 2.0-hoz volt elektronikusan (!) mellékelve. A keretprogramba lépve találhatunk gyakorló feladatokat, feladatokat és profi feladatokat:

Amit most mutatok be, azt az utóbbi gyűjtemény tartalmazza. Vannak mellette egyéb érdekességek, sorban: páncél szekrény, ez vonalkódra nyílik, Hűtőszekrény ajtónyitás számláló egy napszemüvegét emelgető figurával, következő egy rajzoló robot, aztán egy szállító robot, majd a szortírozó robot, végül egy egyszerű robot kéz, amely markol ceruza jellegű tárgyakat és odébb pakolja:
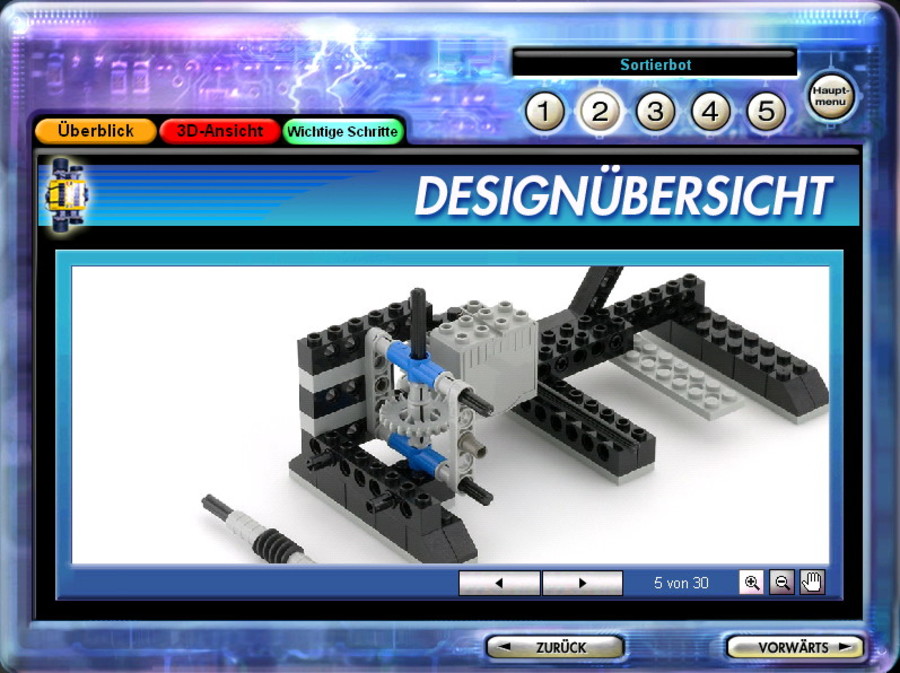
Az a jó a profi feladatgyűjteményben, hogy nem tartalmaz lépésről lépésre útmutatót, hanem egy rövid videot a szerkezet működéséről, egy 3D nézetet - körbe lett fotózva a kész építmény, ezeken lépkedhetünk körbe, egy építési fotó sorozatot a fontosabb lépésekről.

Láthatóak a kezelő ikonok, nagyíthatjuk-kicsinyíthetjük és mozgathatjuk a képet, hogy bármely szegletének részleteit felfedezhessük. A 3D nézet és az építési fotók is egyaránt részletesen nézegethetőek:
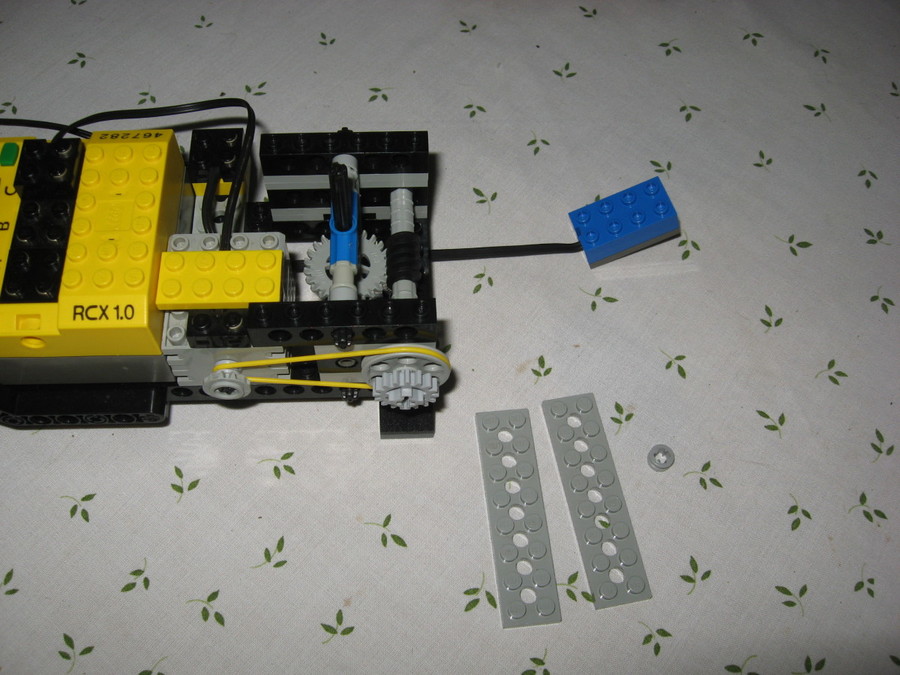
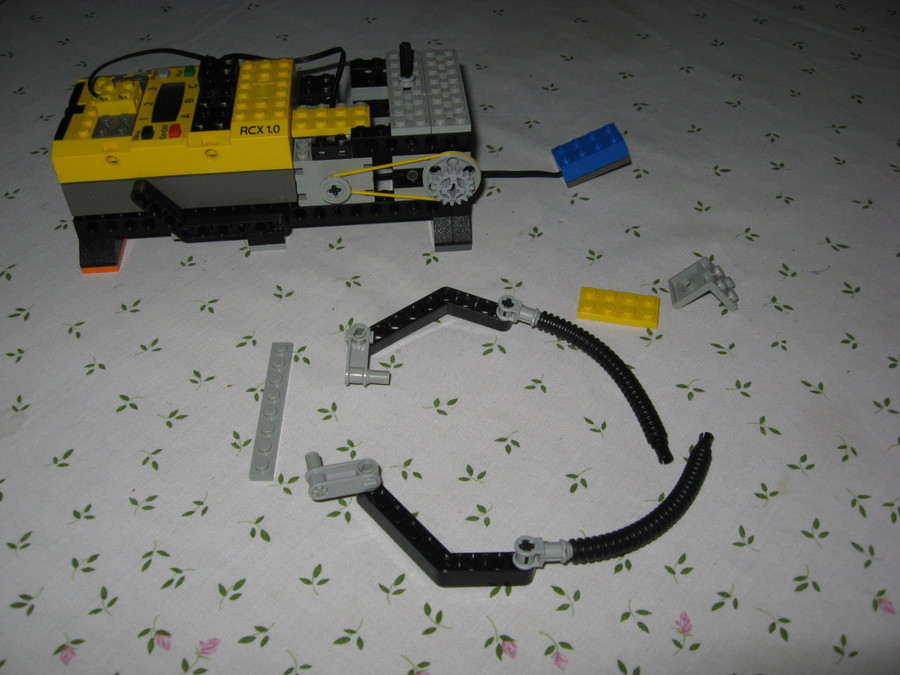
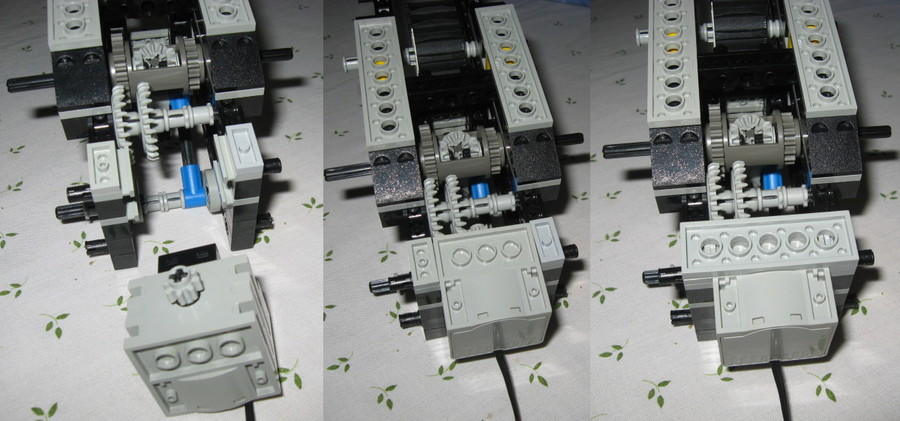
Első szakaszban az építmény alapját rakjuk össze, ez tartalmazza a vezérlő kockát, és egy hajtóművet motorral, mely a felépítmény forgatásáért felel:
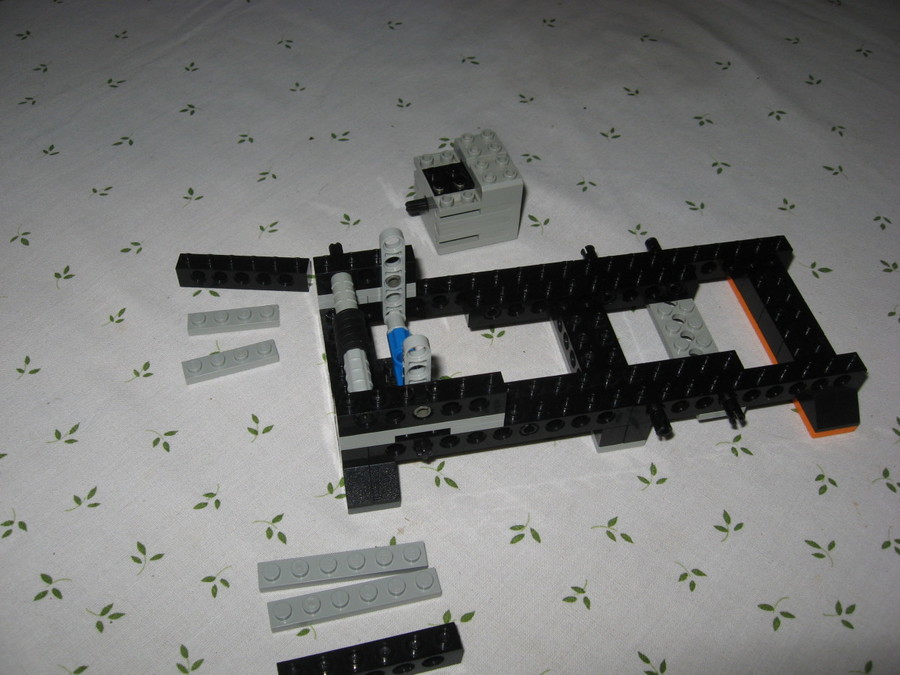
Az ajánlott útmutató nem tartalmaz ezen a szerkezeten szenzor beépítési javaslatot, de mivel a felépítmény működését egy érintés és egy szín szenzor teszi lehetővé, maradt üresen egy szenzor portunk, amellyel itt rendelkezhettünk, ez jó is lesz majd a közép pozíció felismeréséhez. Alábbi képen már látszik az áttétel működése, gumiszíj lassítás után egy csiga hajtás fordítja át a hajtás tengelyét függőlegesre:

A burkolatok és szépítő elemek felrakása után a következő módon sikerült rögzíteni a fényszenzort, amely egy fehér 1-es körkörös elemet fog észlelni a középső pozícióban:

A következő módon működik a mozgás és az érzékelés, az elve pedig az, hogy a forgató elindítja a felépítményt az ellenkező szélső helyzetbe úgy, hogy a mozgás első szakasza a fényes elem érzékeléséig tart, innentől idő alapon mozog a célpozícióig. Ezzel elérjük, hogy minden középpont feletti áthaladáskor megtörténik a pozíció pontosítása, hosszas működés után sem válik pontatlanná a mozgás :
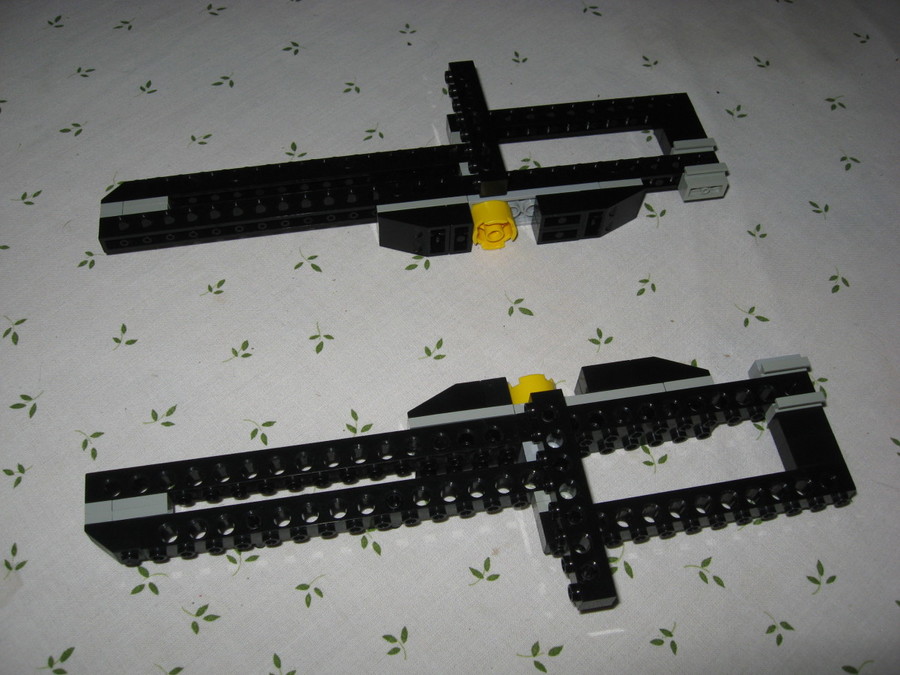
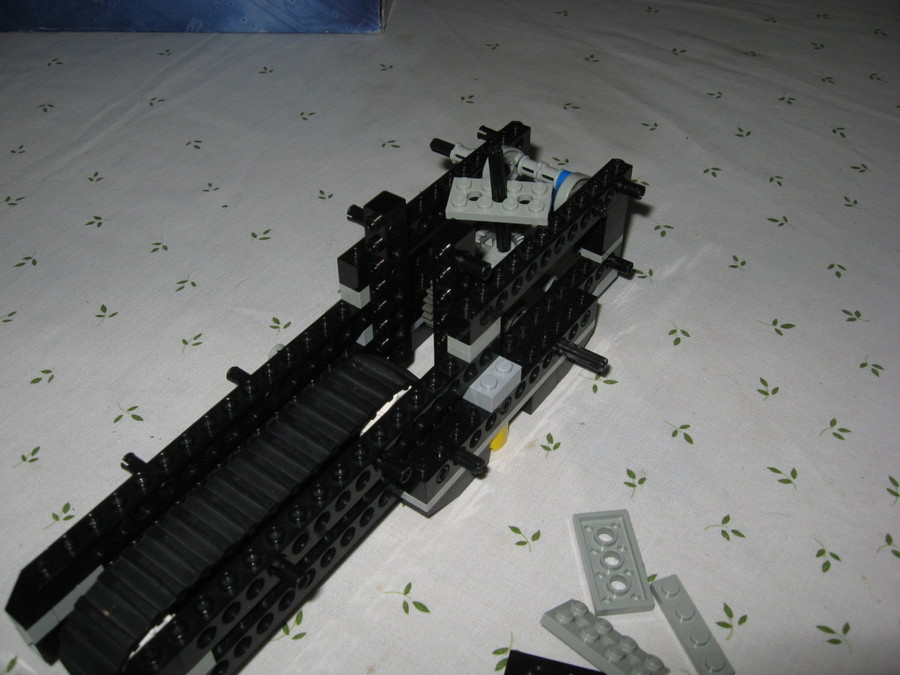
A következő szakaszban a felépítményt építjük meg, ebben nagyon érdekes lesz a meghajtás, de mielőtt odaérnénk, szimmetrikus alakzatok összerakásával indul az építés:

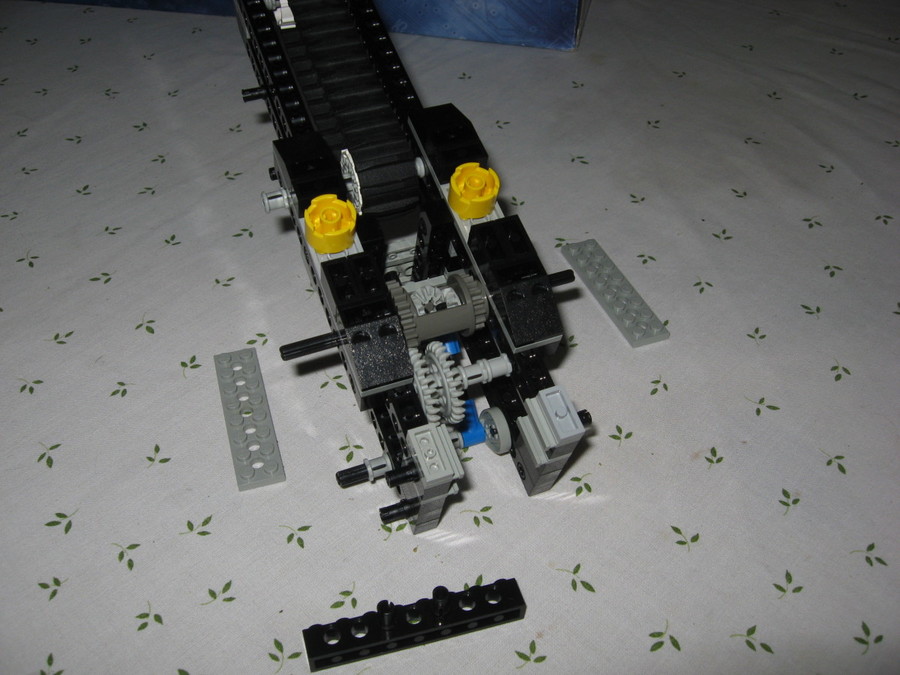
Egy futószalag hordja ki a szín szerint (sötét, világos és üres tároló - állapotokat ismer fel a vezérlés) válogatott darabokat a két tárolóba a szerkezet. Az egyik gumi hernyótalp szolgálja ezt a célt:

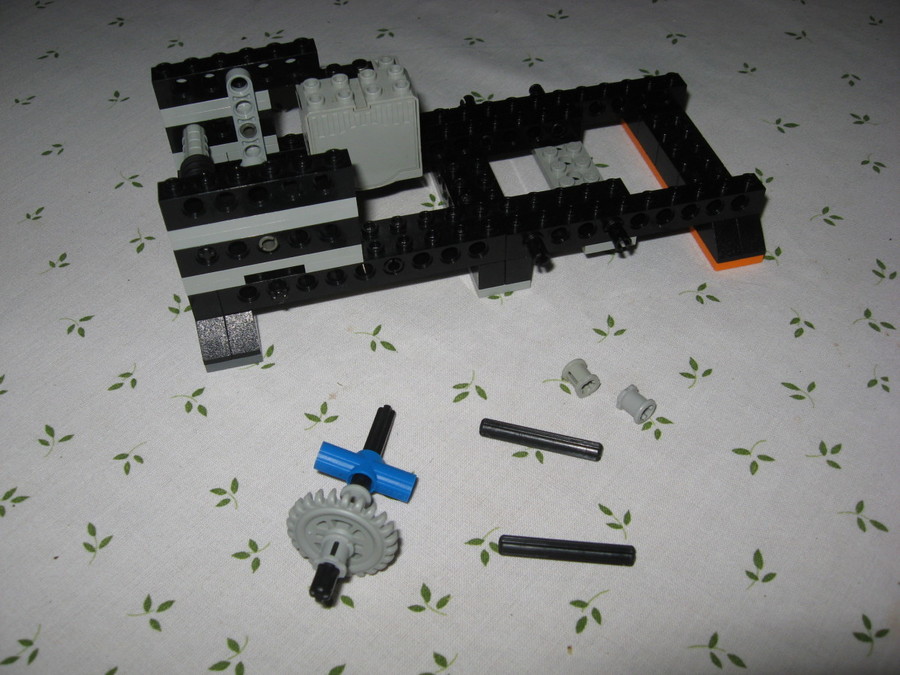
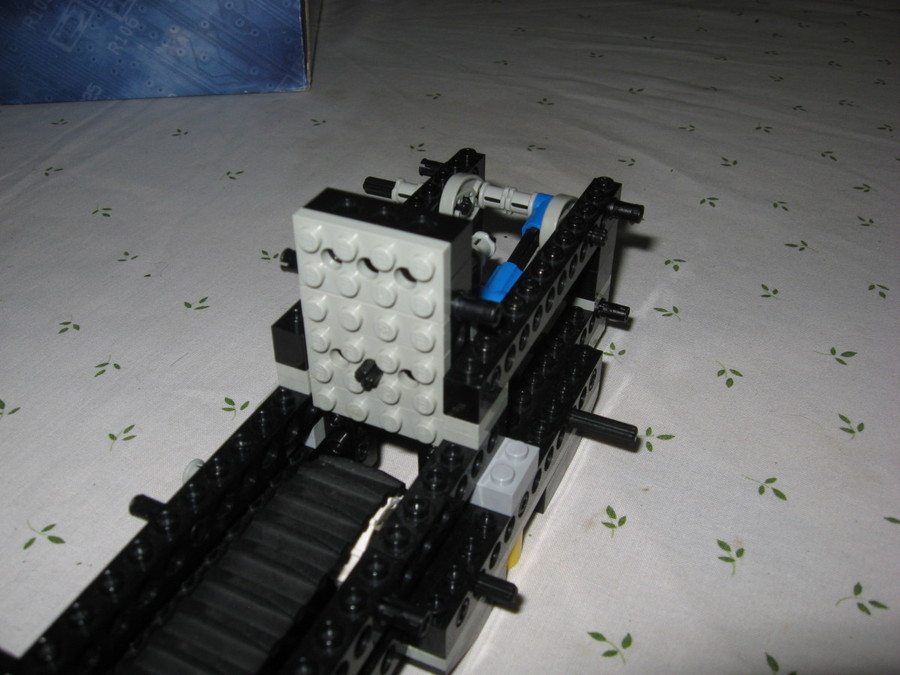
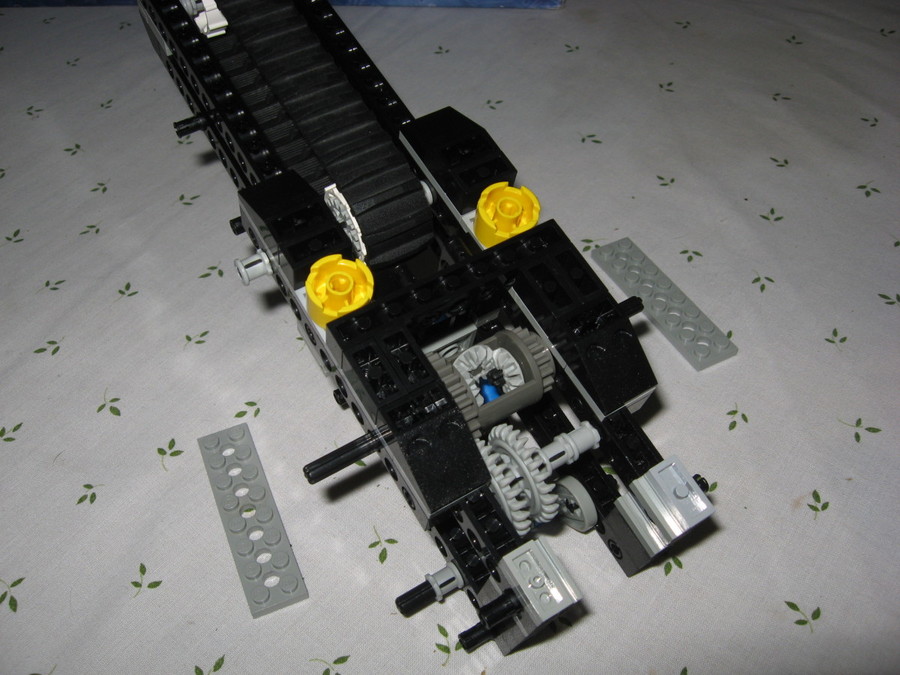
A műszakilag érdekes rész most következik, ez pedig egy rudazat, amely a sötét szín vizsgáló térből tolja ki a válogatott darabot a futószalagra, a rudazatot és a futószalagot is ugyanaz a motor működteti egy differenciálmű és két reteszelés segítségével. Egyik motoro irány a futószalagot mozgatja, a másik irány pedig a rudazatot:

A rudazat működését a következő video mutatja, látható az érintés szenzor, amely a rudazat alap pozíciójának felvételét teszi lehetővé (az alternáló mozgatás mindíg egy körül fordulást végez):
A második rész olvasásához kattints ide!
Köszönöm, hogy elolvastad!
2016-09-06











2016 szeptember 6, 19:13
- 2016 LEGO Újdonságok
- 2017 LEGO® Újdonságok
- 2018 LEGO® Újdonságok
- 2019 LEGO® Újdonságok
- 2020 LEGO® Újdonságok
- 2021 LEGO® Újdonságok
- 2022 LEGO® Újdonságok
- 2023 LEGO® Újdonságok
- 2024 LEGO® Újdonságok
- 60. évfordulós készletek
- Angry Birds
- Animal Crossing™
- Architecture
- Art
- Atlantis
- Avatar
- Bionicle
- Brick Sketches™
- BrickHeadz
- Chima
- City
- Classic
- Creator 3-in-1
- Creator Expert
- DC
- Disney Princess™
- Disney™
- DOTS
- DREAMZzz™
- DUPLO®
- Elves
- Fortnite™
- Friends
- Gabby babaháza
- Ghostbusters™
- Gyűrűk Ura
- Harry Potter™
- Hidden Side
- ICONS
- Ideas - CUUSOO
- Indiana Jones
- Juniors
- Jurassic World
- Kaland - LEGO Movie
- Karib tenger kalózai
- Kastély, LEGO Vár (Kingdoms)
- Large Models
- Lone Ranger
- Marvel
- MINDSTORMS®
- Minecraft™
- Minions®
- Mixels
- Monkie Kid™
- Monster Fighters
- NEXO KNIGHTS™
- NINJAGO®
- Overwatch®
- Pirates
- Polybag - Mini készletek
- Power Functions
- Powered Up
- Scooby-Doo
- Sérült doboz
- Sonic the Hedgehog™
- Speed Champions
- Star Wars™
- Star Wars™ gyűjtői készletek
- Stranger Things
- Super Mario
- Technic
- The Legend of Zelda™
- THE LEGO® BATMAN MOVIE™
- Trollok®
- Ultimate Collector Series
- Ultra Agents
- Unikitty™
- VIDIYO™
- Wednesday
- Wicked
- Xtra
- További készletek
Értesülj elsőként a vásárláshoz járó ajándékokról, újdonságokról!

Elfogadom az adatvédelmi szabályzatot
JöhetTörlöm