Lego RÁBA-Steiger 4WD
Ezt az összkerék hajtású traktort először 2014 január-februárban építettem meg, akkor még nem használtam Lego Digital Designert, szóval ez olyan igazi nulláról építés volt, sokszori vissza bontással, újbóli átgondolással, ismételt megépítéssel. A formája nem illeszkedik az öreg Technic stílushoz, nem csak váz jellegű a traktor, de ezt így is szerettem volva. Egyébként Old School-nak nevezhető az egész jármű, mert a Power Functions komponensek kivételével gyakorlatilag ős-Technic elemekből hoztam össze mindenét :-) Nézzük, hogy is néz ki most:

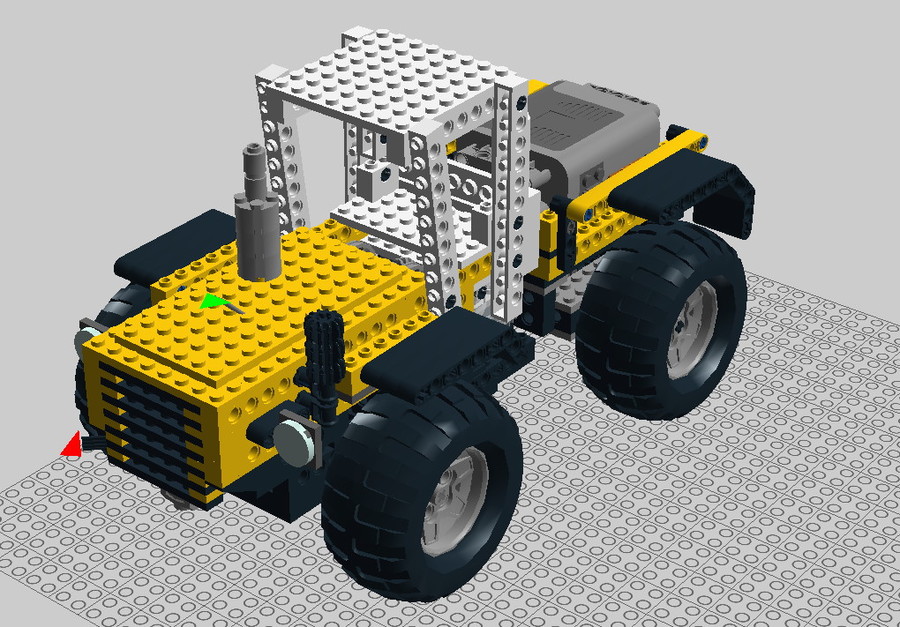
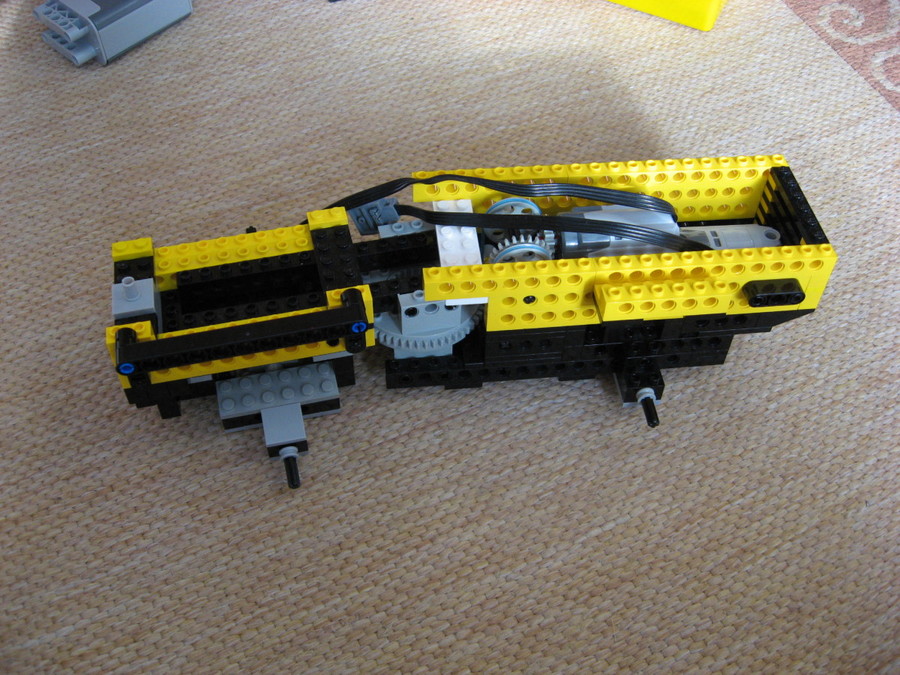
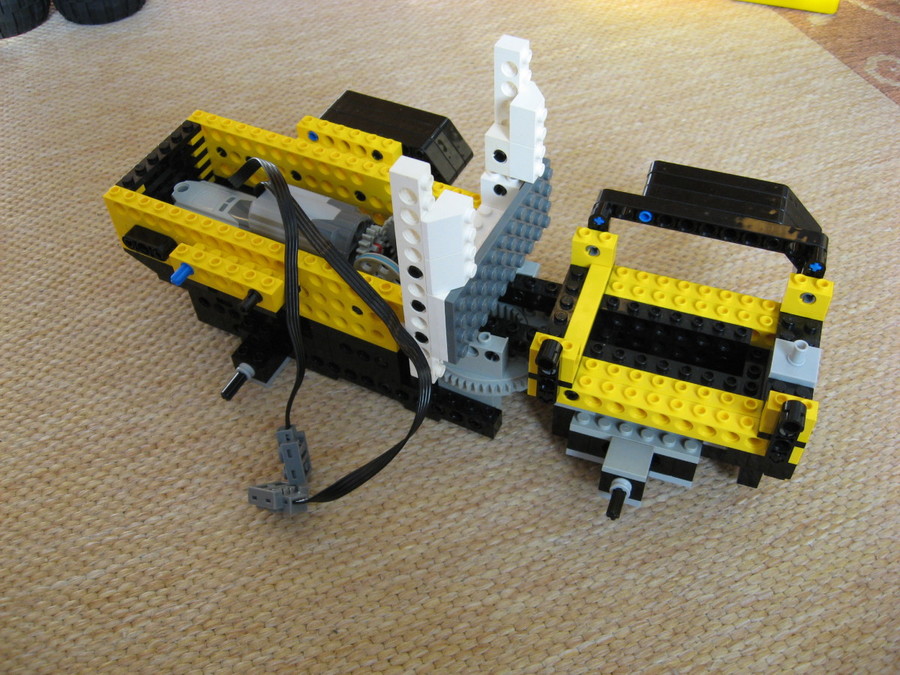
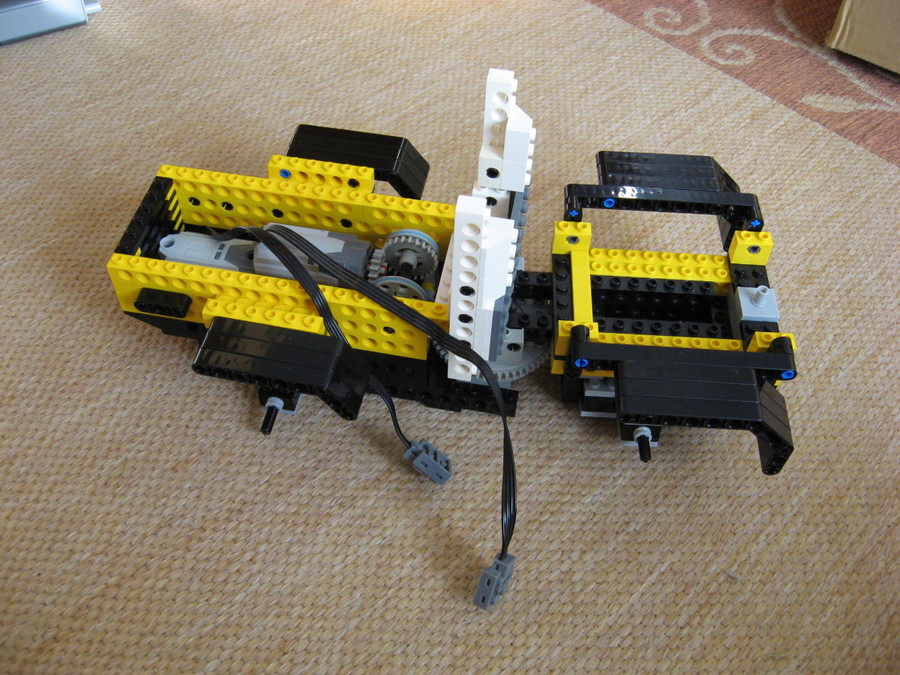
A most összeépített változat
Most már jóval összeszedettebb, mint az eredeti változat, a fekete - sárga - fehér részek jól elkülönülnek és sikerült hozzá illő kerekeket is beszereznem idő közben. Az első változatban még a kerekek is a régi készletekből kerültek fel:
A Prototípus 2014 januárjában
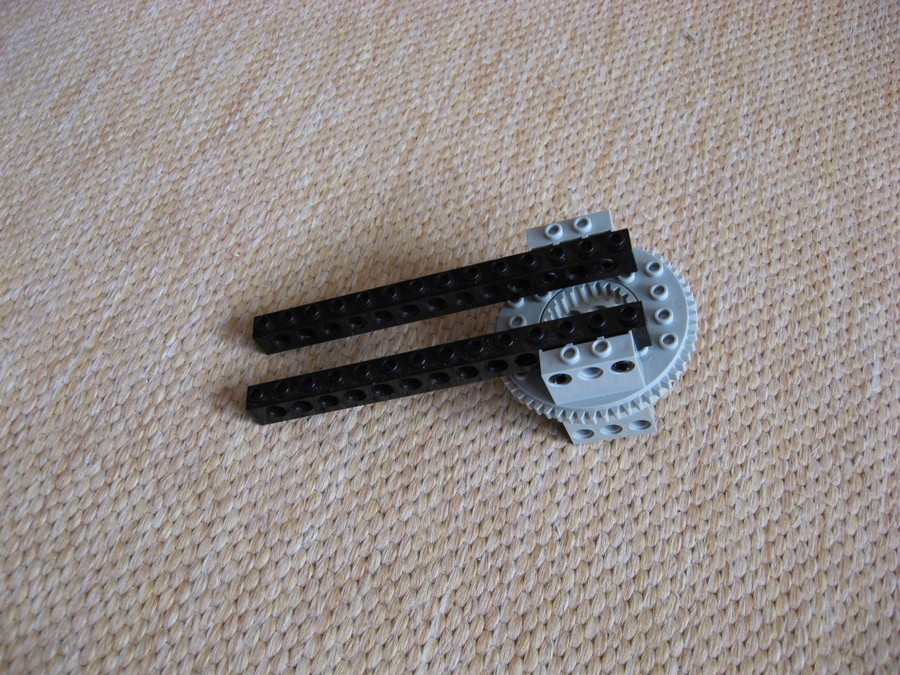
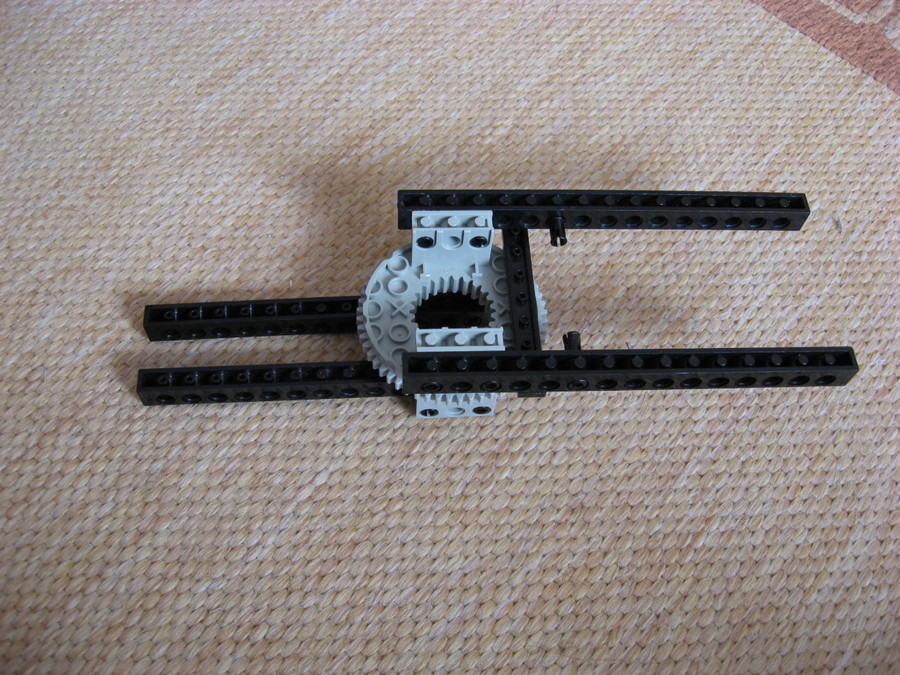
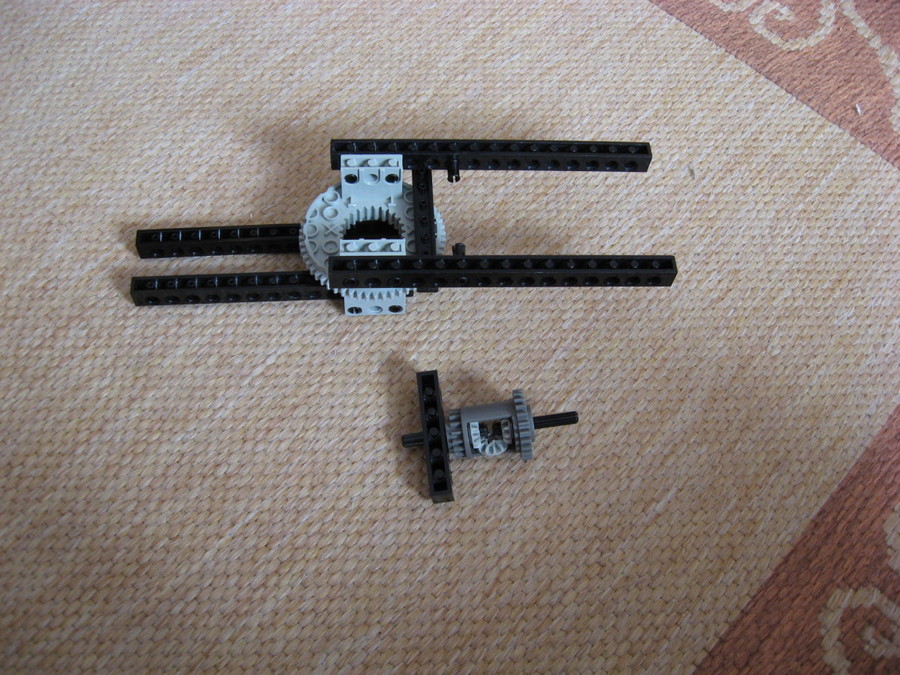
Már ez a változat is szépen működött, a mostaninál lényeges szerkezeti eltérések nincsenek, inkább az összevadászott alkatrészek miatt összeszedettebb. Eredetileg az volt a célom, hogy hagyományos Technic-ből összekerék hajtásos járművet építsek, ezért jött a törzskormányzás ötlete, hiszen azokból az alkatrészekből a kormányzott kerék meghajtása szinte lehetetlen. Voltak ezirányú próbálkozásaim is a kezdetekben, de aztán ezt feladtam:
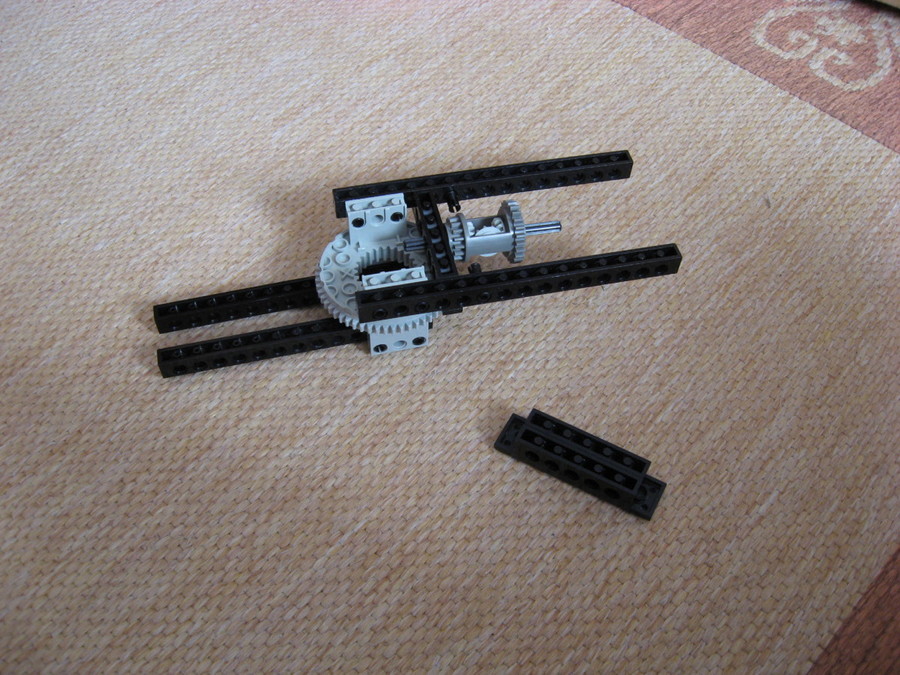
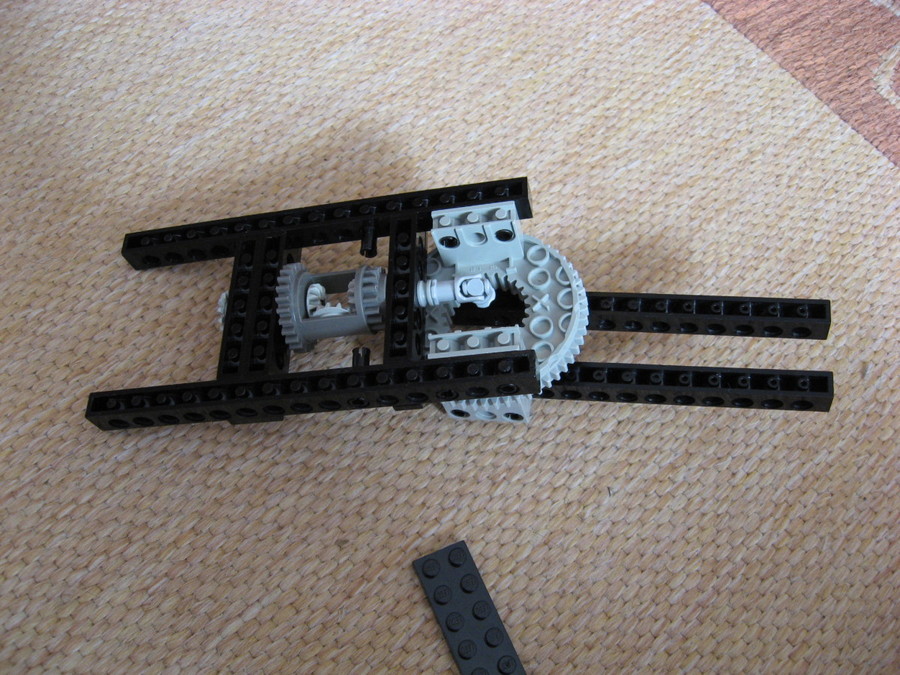
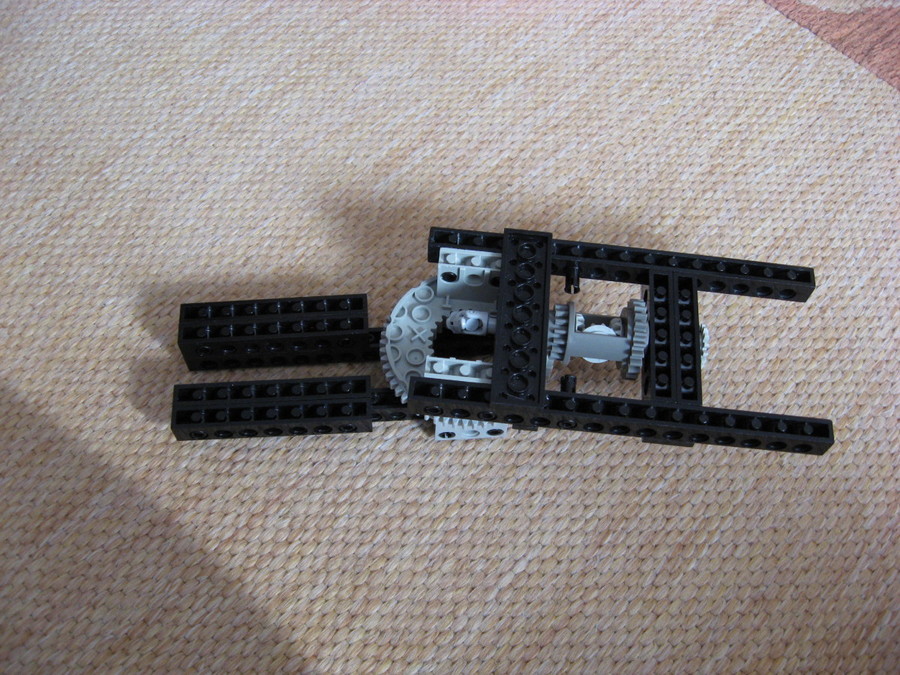
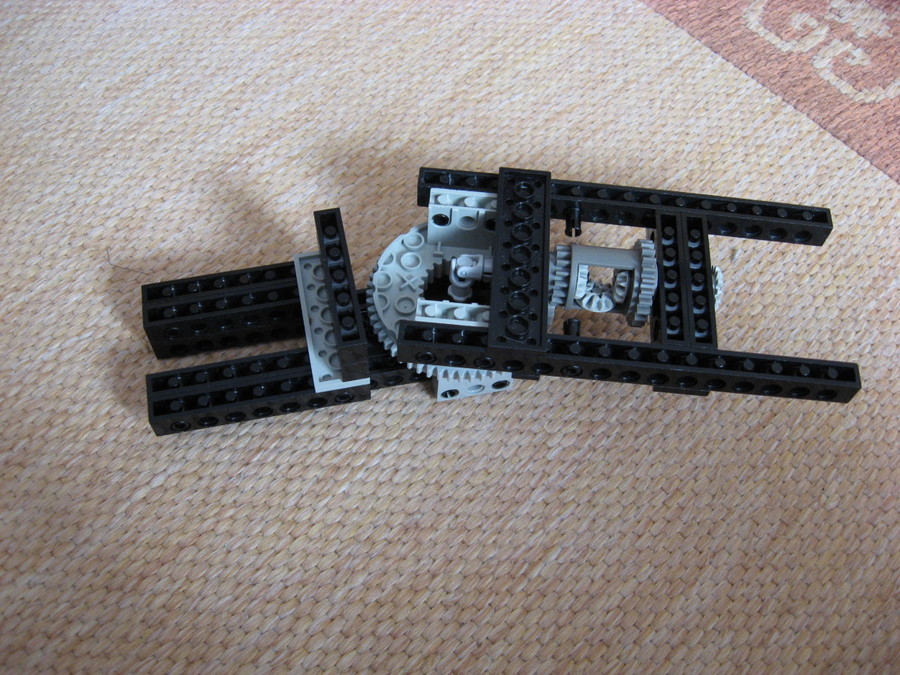
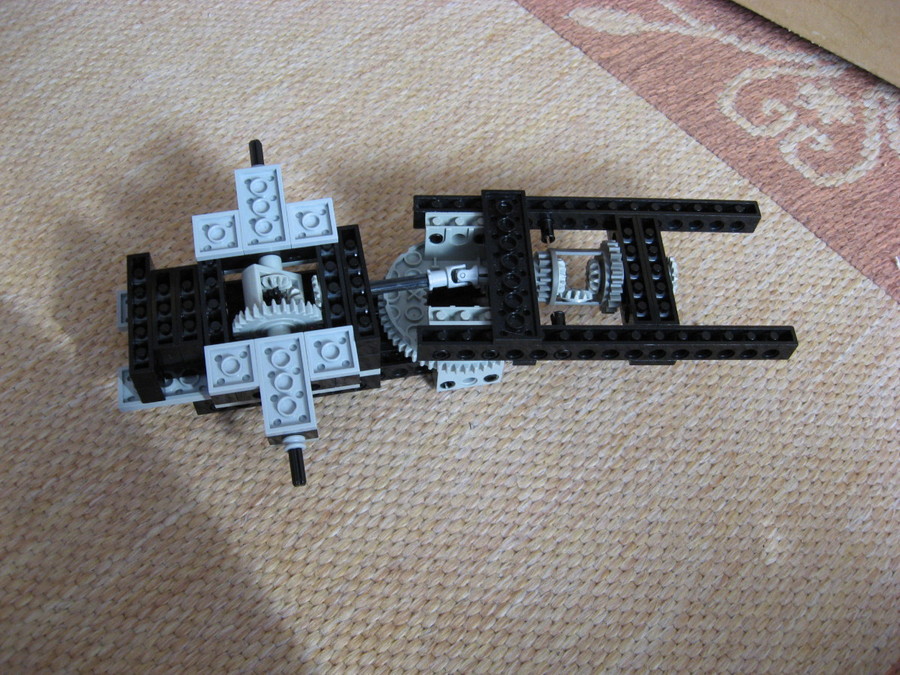
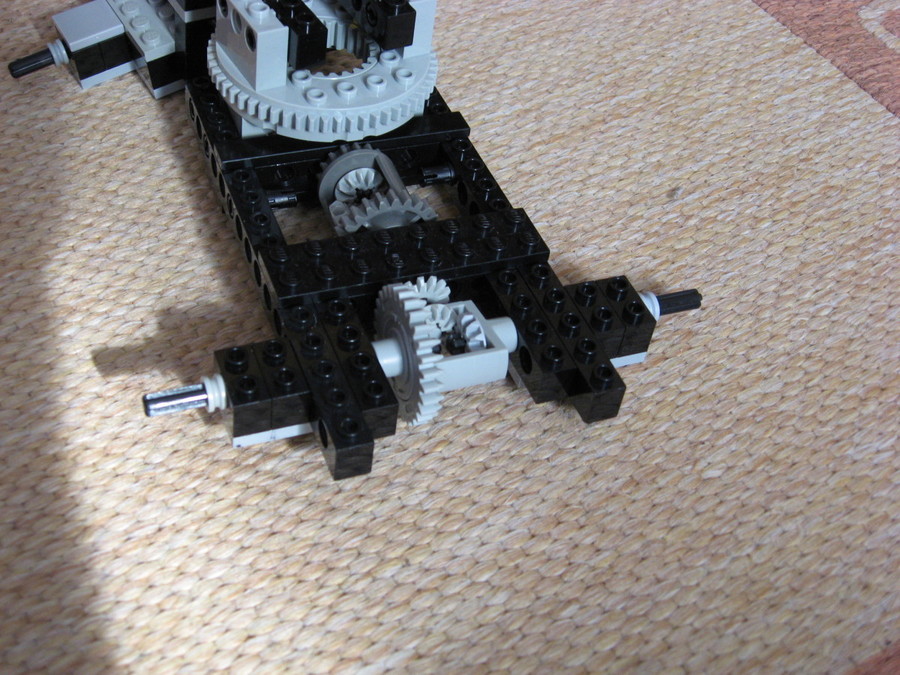
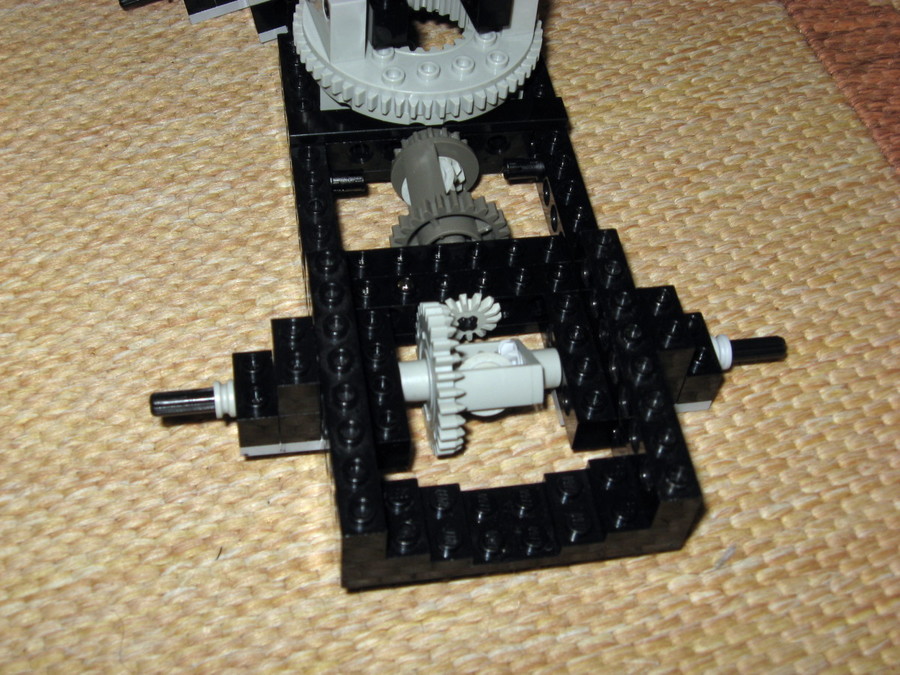
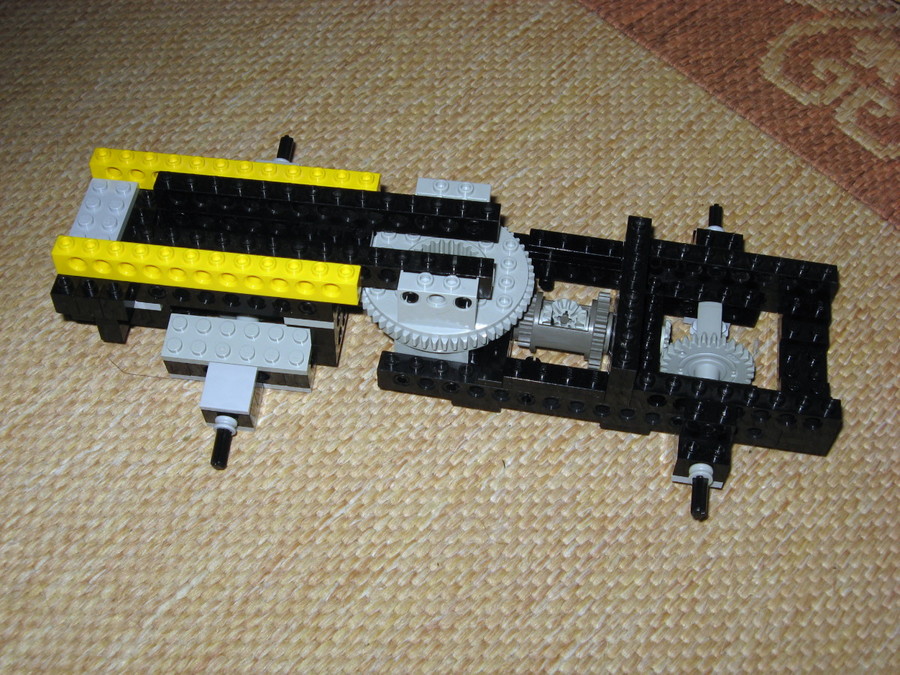
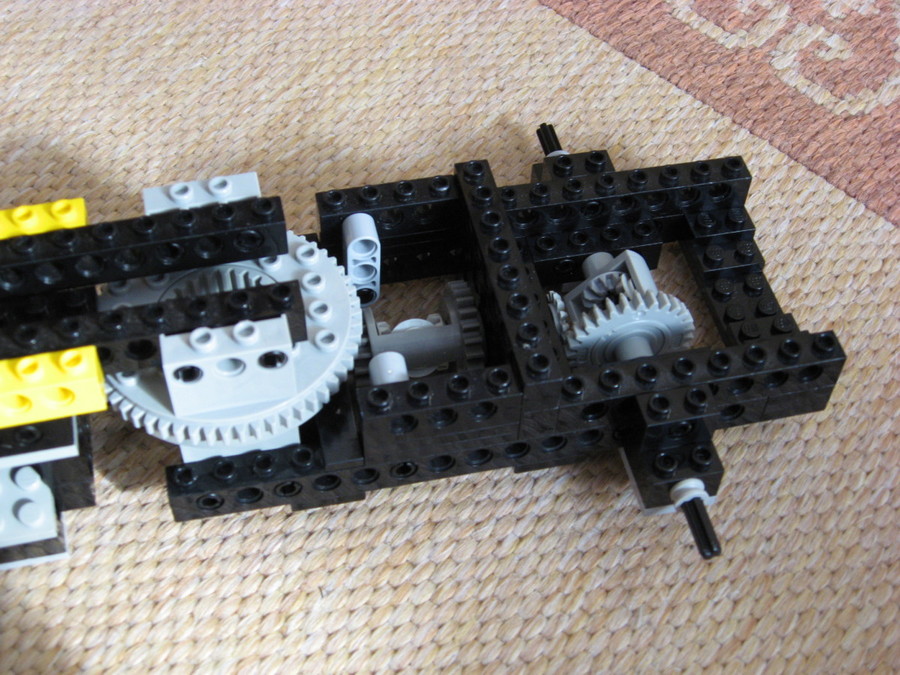
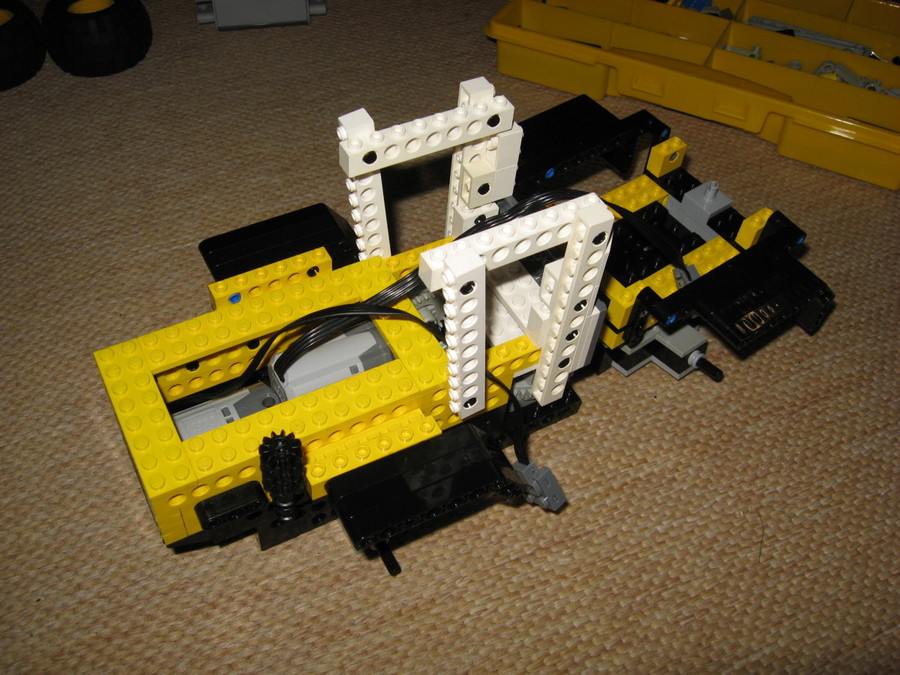
Összkerék hajtás Ős Technic-ből
Ez egy koncepció építés volt a nagy fordulatú 9 V-os Technic motorok felhasználásával, a teljes lassító áttételezés Technic fogaskerekekkel valósult meg, elől nem volt differenciálmű, mert egyszerűen nem fért el, az első és hátsó tengelyek fordulatszáma megegyezett, így volt megoldva a főáttételnél, kellett számolnom a fogszámokat is, mire össze bírtam hozni. A hosszirányú diffi lehetővé teszi eltérő krékátmérők alkalmazását is. ezt már teszteltem is érdekesség képpen, de itt még ez sem volt beépítve. Az autó kezdeményt próbáltam bakolás nélkül is járatni, ment és kanyarodott szépen, de a vezérlése vezetékes volt, felépítmény nem készült hozzá. Innen indult a törzskormányzás gondolata, mint egyetlen lehetőség. Miután elkészült, és kibontakozott a formája, gondoltam elnevezni Lego RÁBA-Steigernek, emléket állítva az egykor győri gyártású Magyar munkagépeknek, amelyekből ma is látni még itt-ott működő példányt!
Igen, vannak működő példányok, mérete miatt főleg az alföldön, és úgy néz ki, hogy egy Magyar cég elkészített egy prototípust új motorral és váltóval, és a számtanilag működőnek látszó üzleti modell keretében a meglévő példányok korszerűsítésével szeretnék feltámasztani a Rába legendát. A Totalcar-on találtam egy ezév márciusban íródott cikket erről, érdemes elolvasni!

RÁBA-Steiger Győrből
A 2014-es prototípust szétszedtem, és amikor elkezdtem LDD-vel is foglalkozni, úgy gondoltam, hogy megéri a fáradtságot, hogy a készült fotók és videók valamint az emlékeim segítségével összeállítsam a dgitális változatát, hogy újból megépíthető legyen a bevállt konstrukció. Digitálisan sikerült kicsit racionalizálni az építést, és próbálkoztam sokat a sárvédők kialakításával is, végül megszületett ez a változat:
A digitális változat
Az áttételezésnél volt két érdekesség, ugyanis amit az LDD úgy ítélt meg, hogy megépíthető, az a valóságban nem jött össze: az egyik áttétel tengely elhelyezését kellett kicsit módosítanom és két szürke merevítő nem fért be a hossz irányú differenciálmű mellé, de ez nem volt lényeges probléma, gyorsan lehetett rögtönözni a működő megoldásokat.
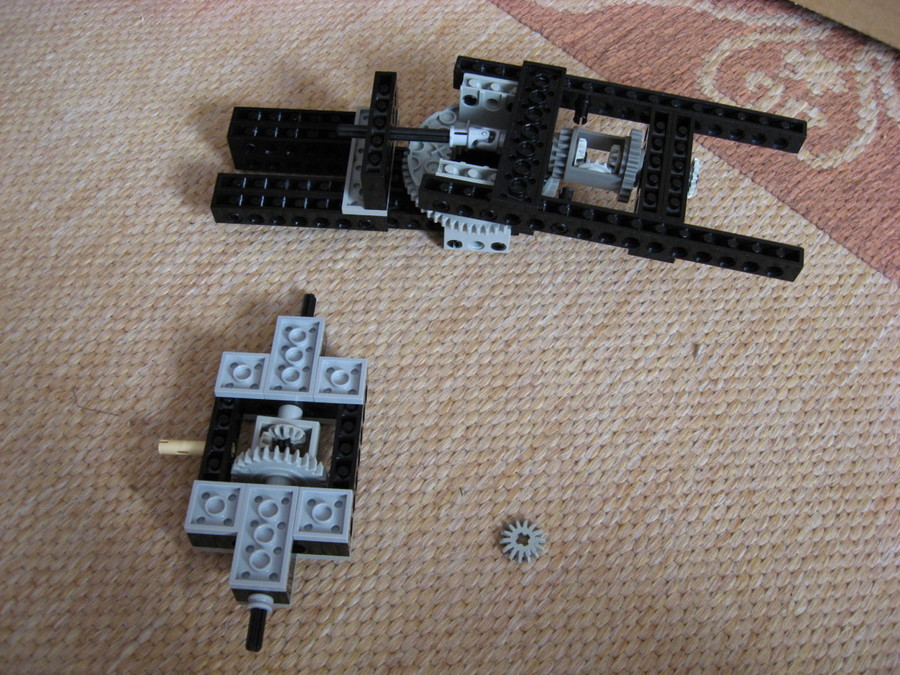
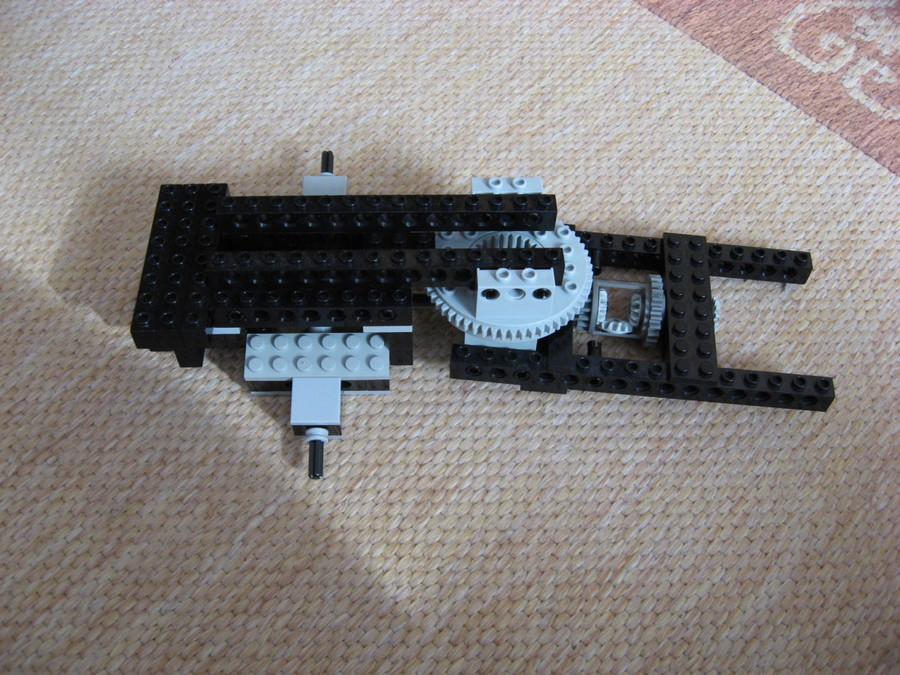
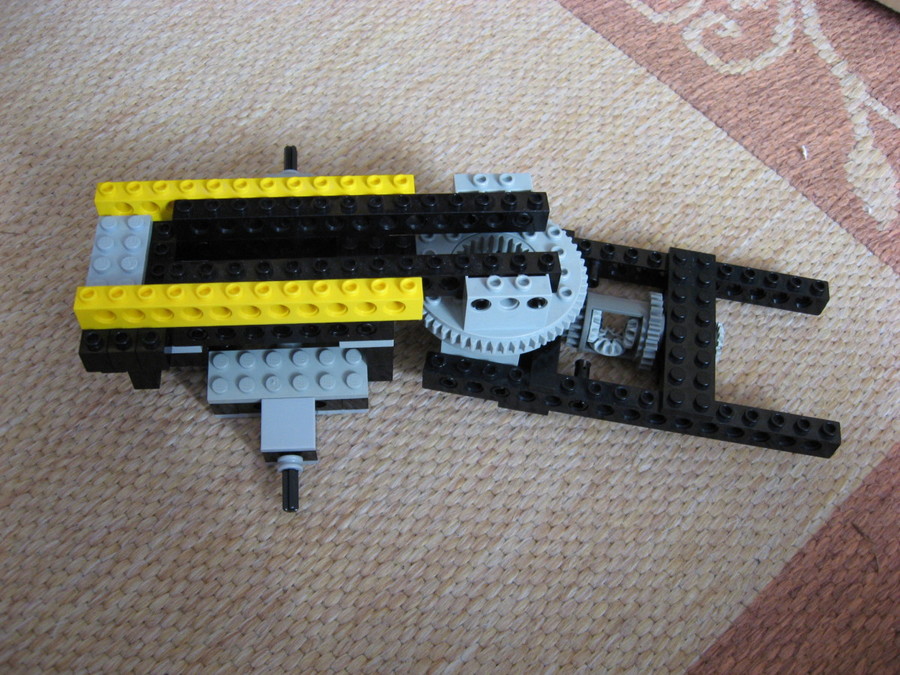
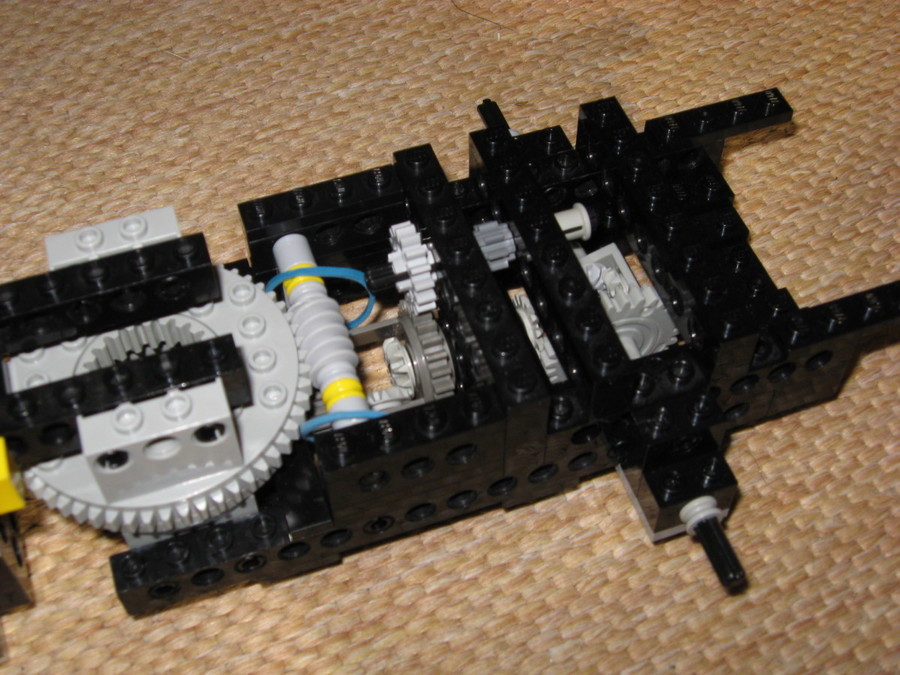
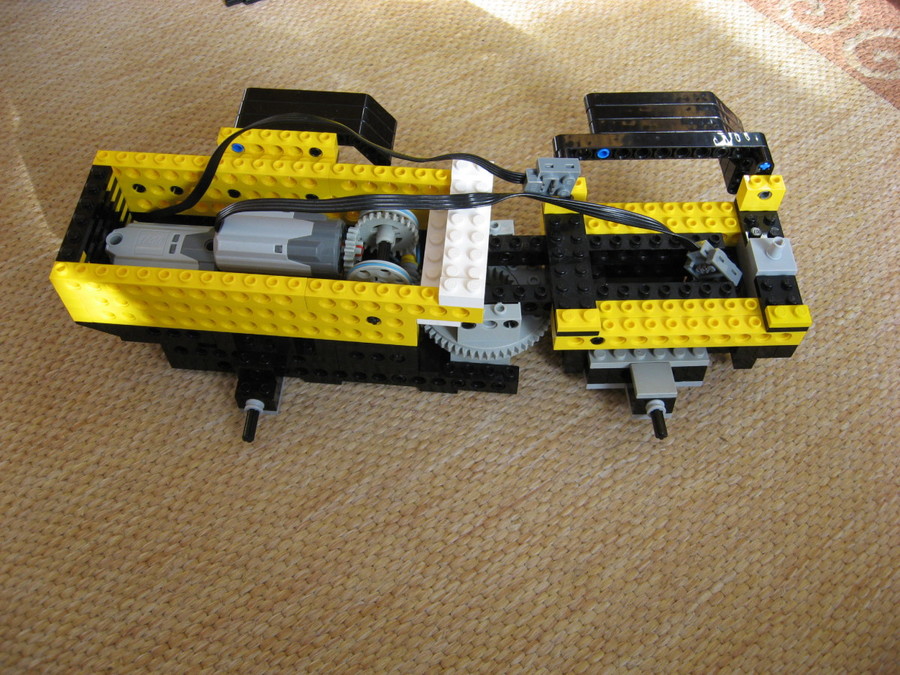
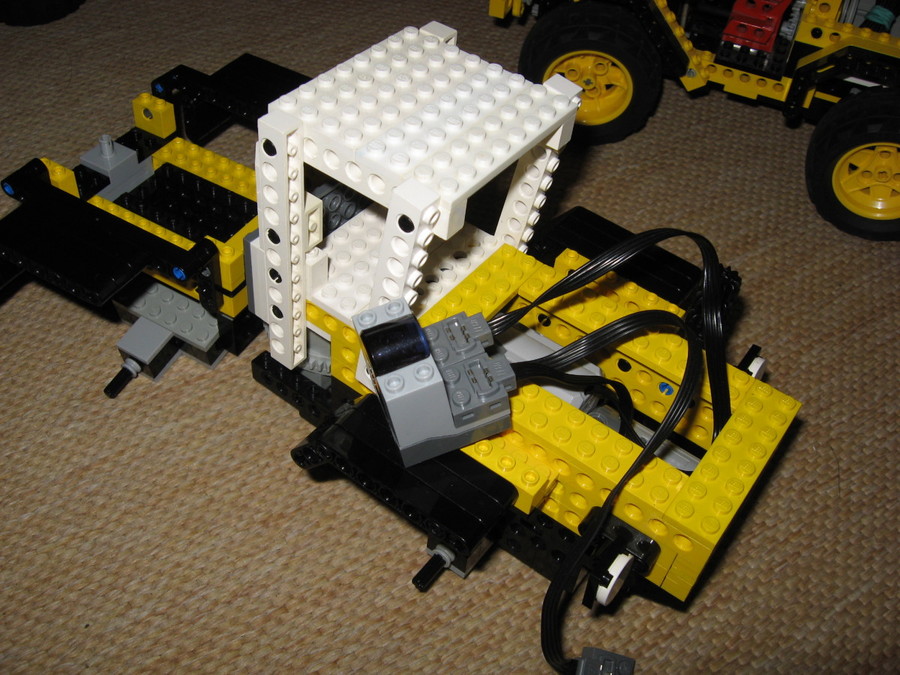
A kormányzásról érdemes pár szót írni, hiszen a törzskormányzás nem gyakori a Lego távirányított modelljei között. Én egy régi daru fogaskoszorús forgózsámolyt használtam fel az első és a hátsó rész összekötésére, amit sok próbálkozást követően végül csigakerék áttételezéssel mozgatok. Az elfordulást maga a szerkezet határolja, a meghajtás kuplunkjaként két gumiszíj áttétel szolgál:
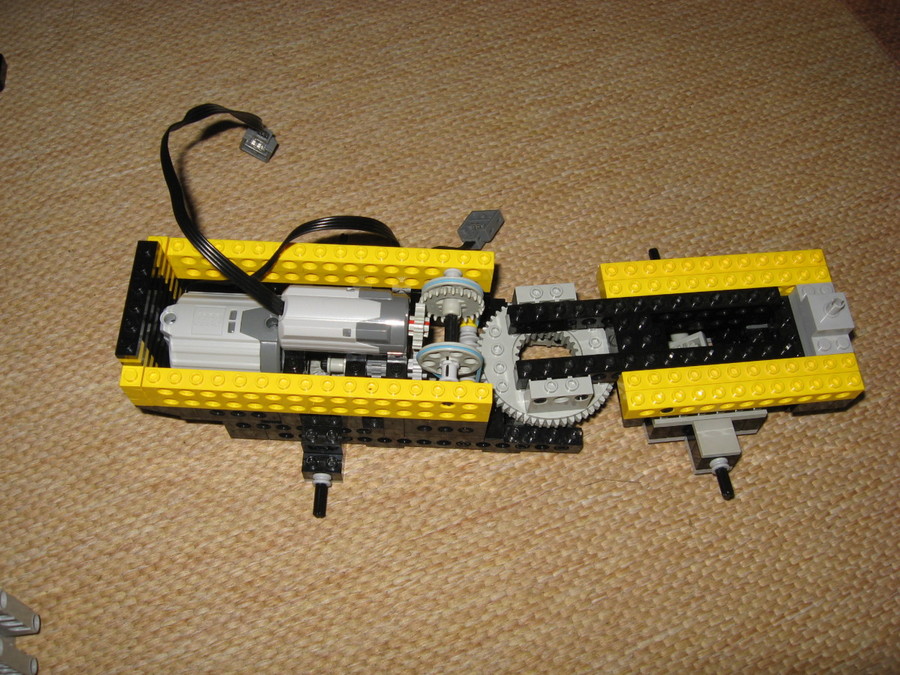
A kormányzás meghajtása, kuplungolása
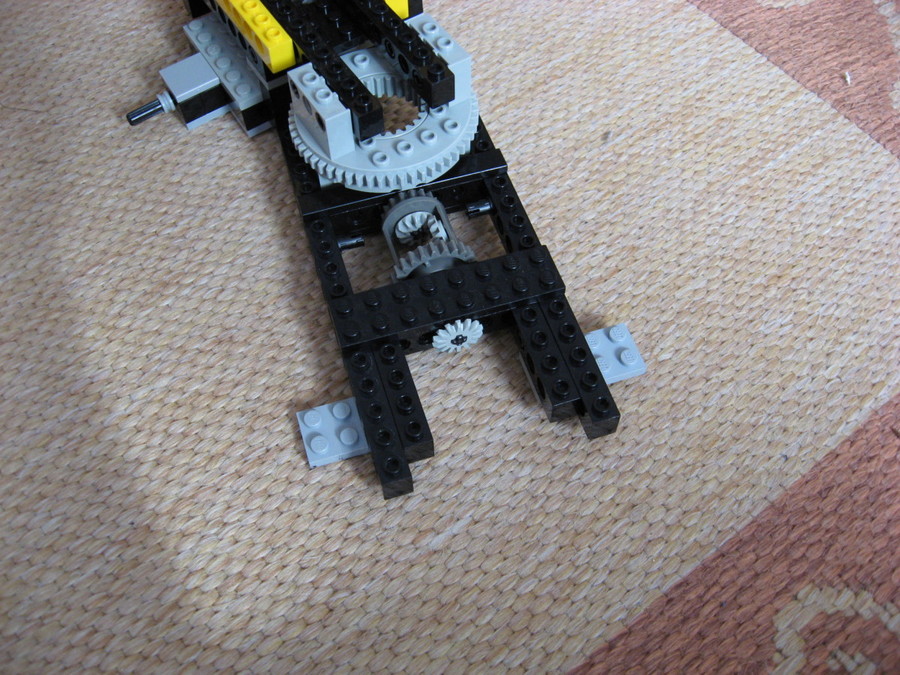
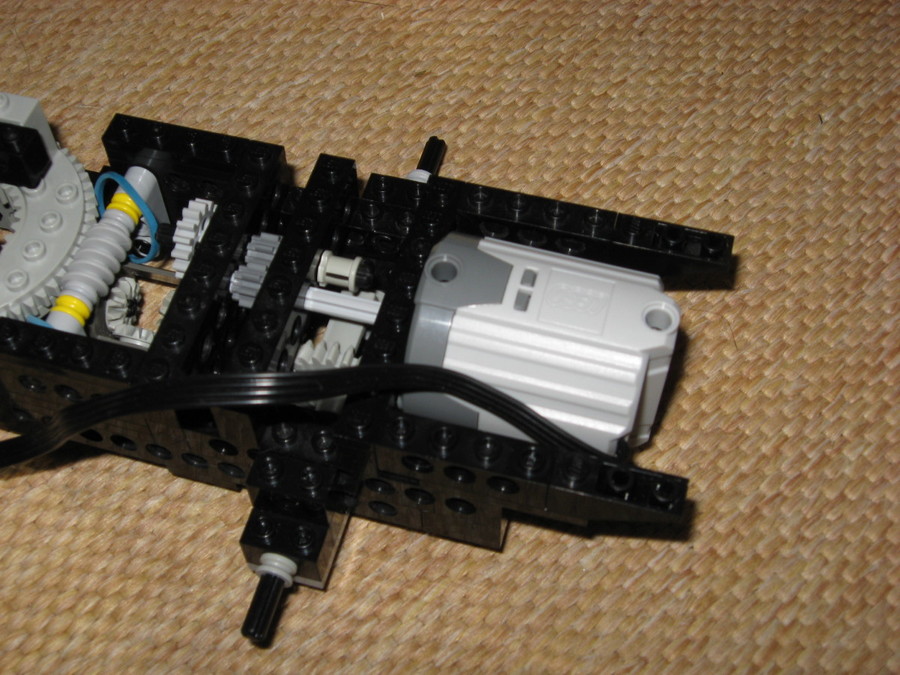
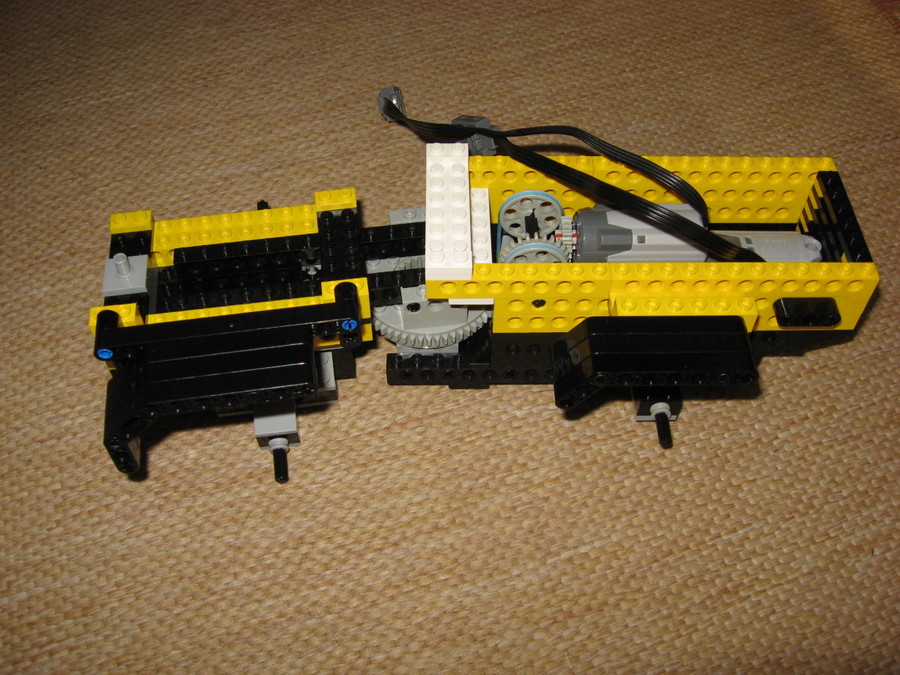
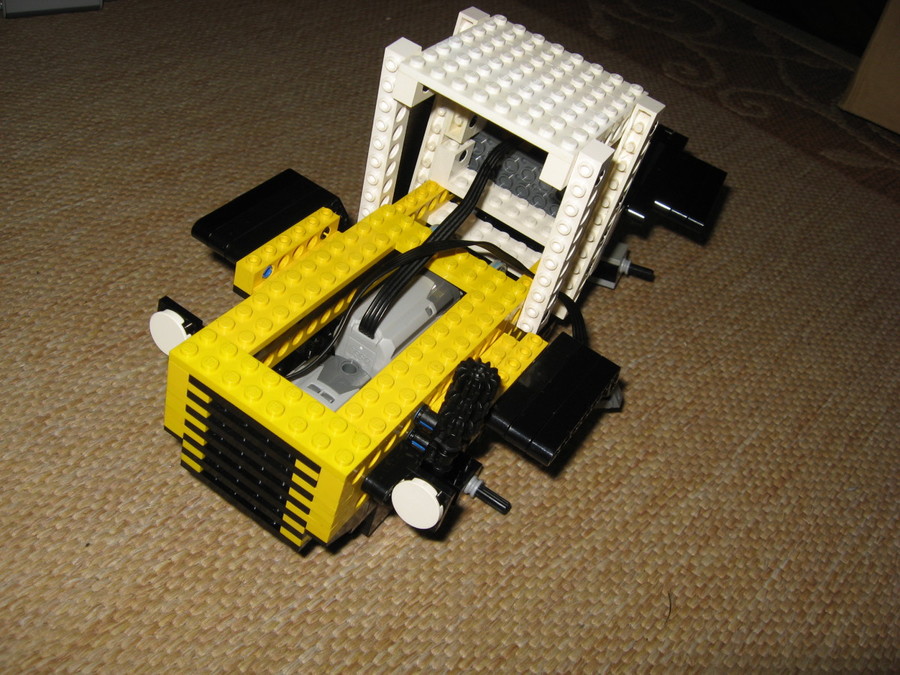
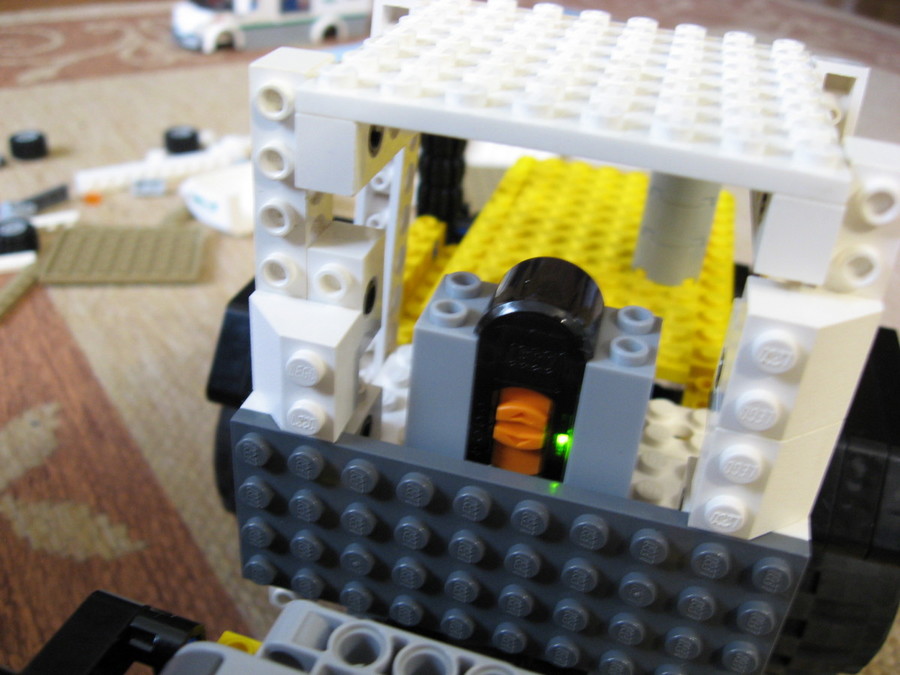
Az M motort sikerült hosszában elhelyeznem a "motorházban", ez lehetővé tette a viszonylag kis méretű kialakítást (8 stud széles a törzs), így végül egy kicsi és fürge jármű alakulhatott ki. Látható, hogy a az első és hátsó részek súlypontjai is kb. a tengelyek fölé rendeződnek, ez könnyíti a kormány működését és jó hatásssal van a stabilitásra, mozgó képességre is. Így működik a kormányzás:
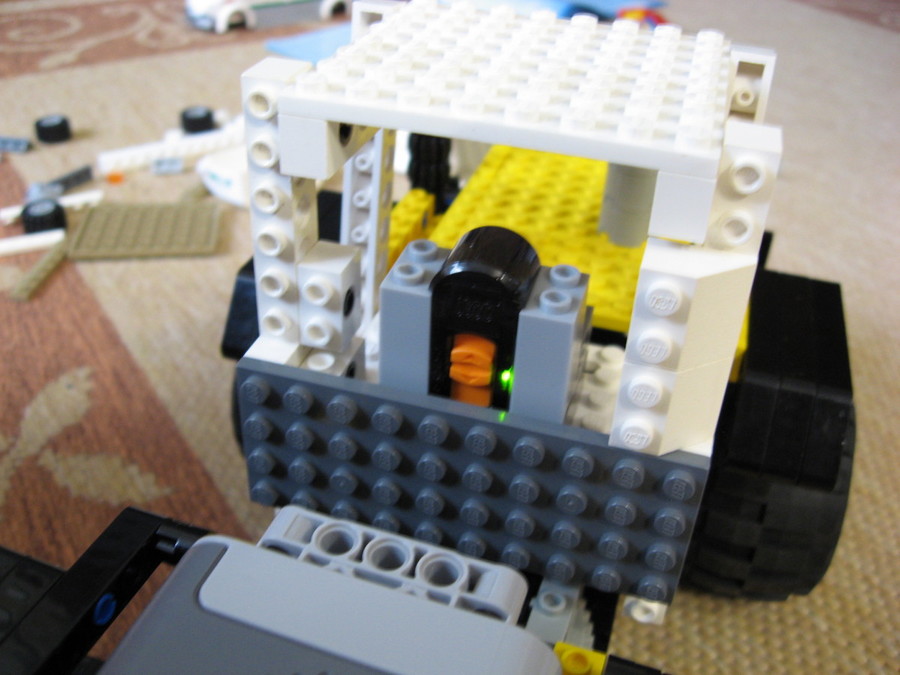
A Törzskormányzás működése
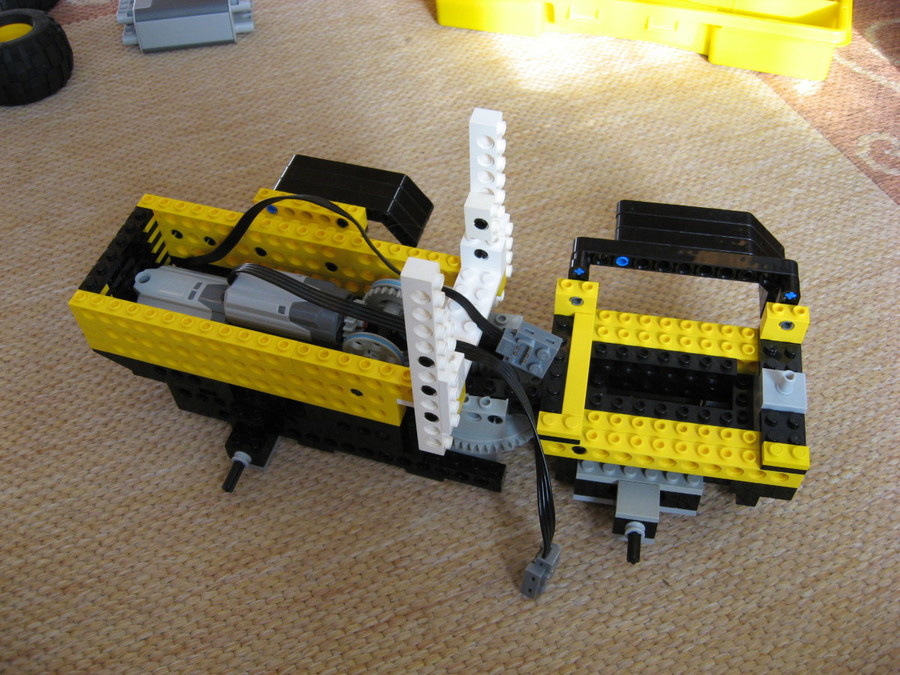
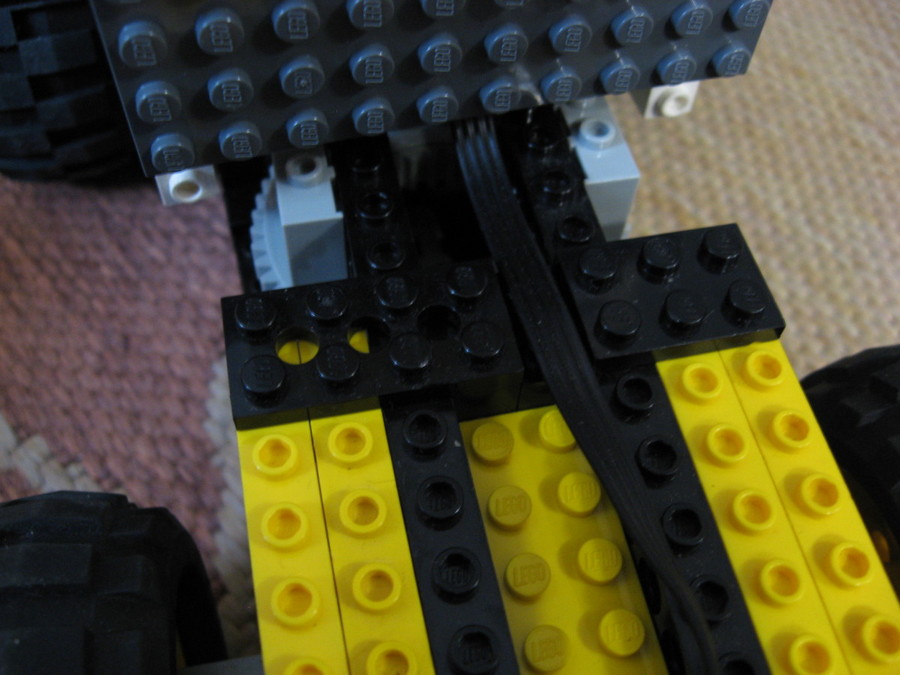
A hátsó hidat billegőre készítettem, hogy terepakadályok leküzdésére is alkalmas legyen a jármű, végülis ez egy traktor, nem autópályára tervezték :-) Ennek a megoldásnak a prototípusát a 8850-es terepjáró motorizálásához "fejlesztettem", ami nagyon jól bevállt, ide gyakorlatilag bemásoltam a konstrukciót. Látható a képen, hogy a billegés tengelye egybeesik a meghajtás tengelyével, így azon az oldalon maga a hajtó tengely teszi lehetővé a mozgást, ellentétes oldalon egy laza illesztésű, három egység hosszú pin látja el ezt a funkciót.
A billegő hátsó híd
Az alkatrészeket úgy szereztem be ehhez a most megépült változathoz, hogy az LDD "Export BOM" funkciójával generáltam egy Excel táblát, ami csoportosítva tartalmazta s szükséges kockákat, ez egy nagyon hasznos funkció, ajánlom mindenkinek:
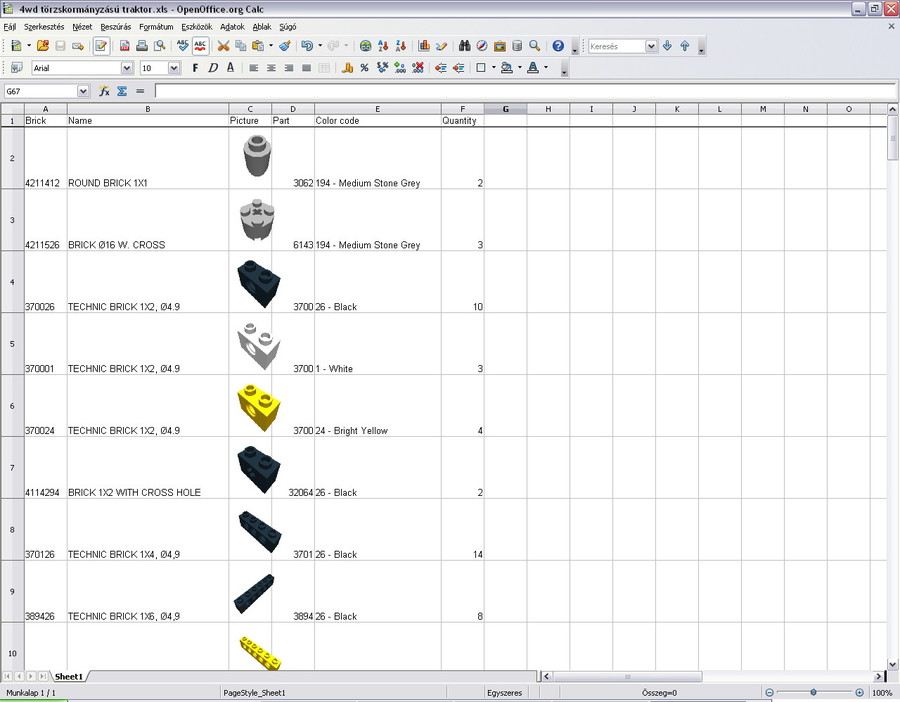
LDD Export BOM alkatrészlista
Az építés során volt egy-két konstrukció igazítás, amelyeket szépen nyomon lehet követni a mellékelt fotókból, aki kedvet kap, az össze is tudja rakni saját Lego RÁBA-Steigerét azok alapján.
Ahogy elkészültem és leteszteltem az összes ajtóküszöbnél, kivittem a készülő járdánk leterített murva alapjára, egész jól birkózott a terepviszonyokkal:
Szabadtéri tesztelés
2015-05-13
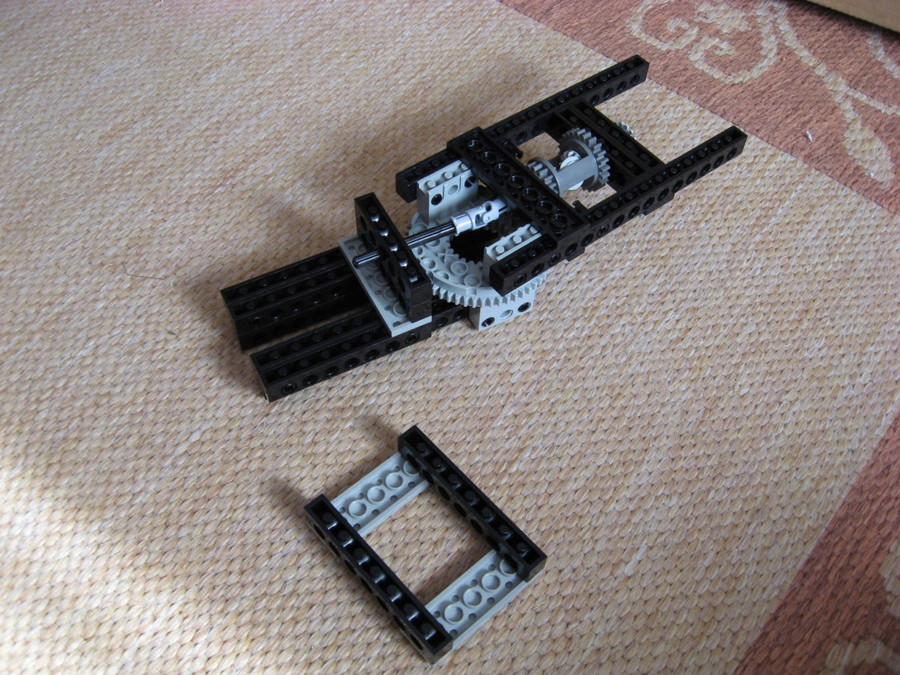





 Ezt a merevítőt az LDD be engedte tenni a hosszdiffi mellé, a valóságban oda nem fért be...
Ezt a merevítőt az LDD be engedte tenni a hosszdiffi mellé, a valóságban oda nem fért be...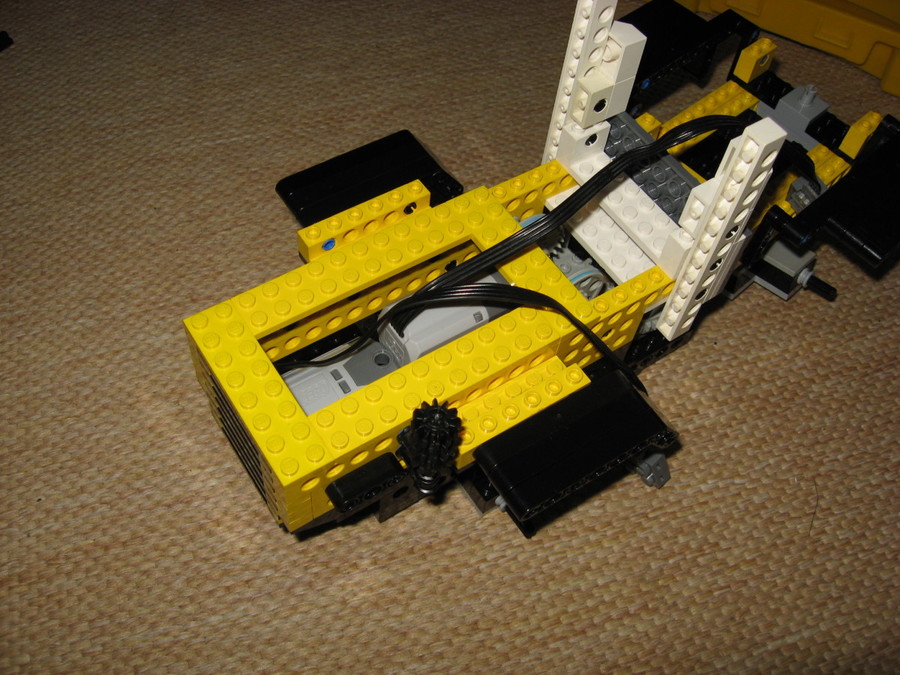




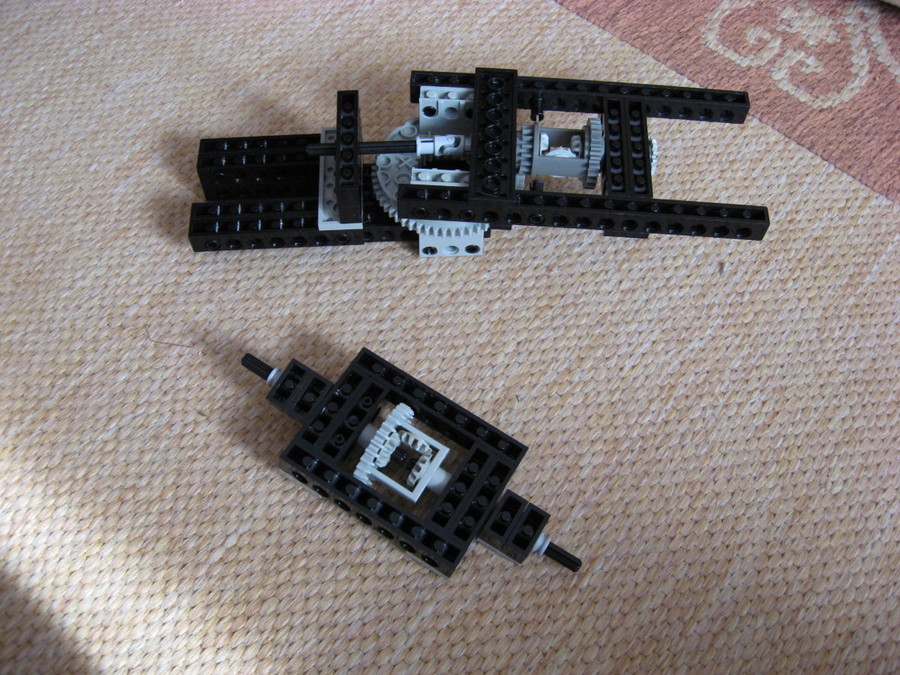
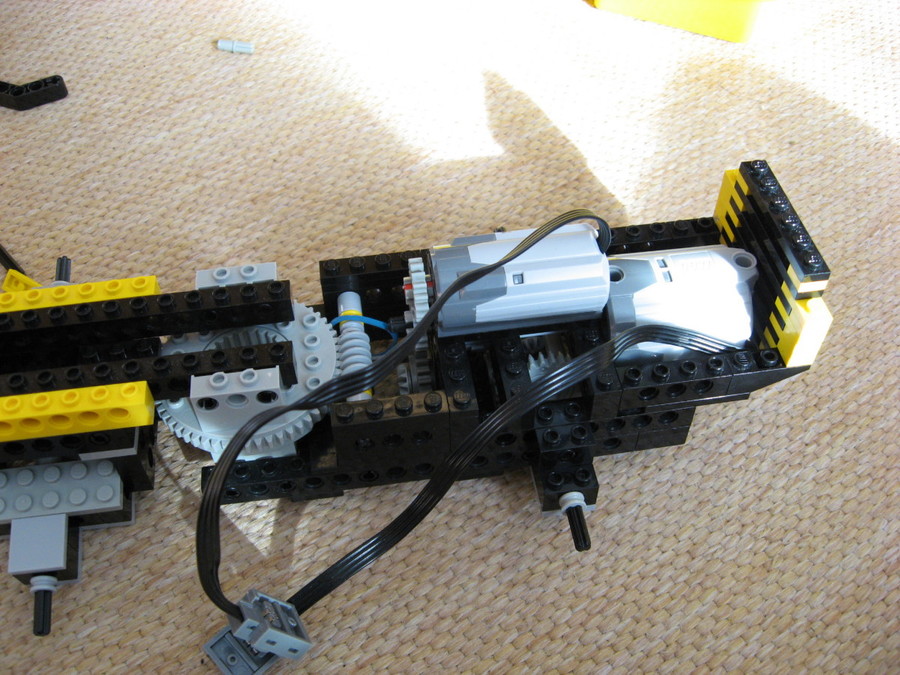
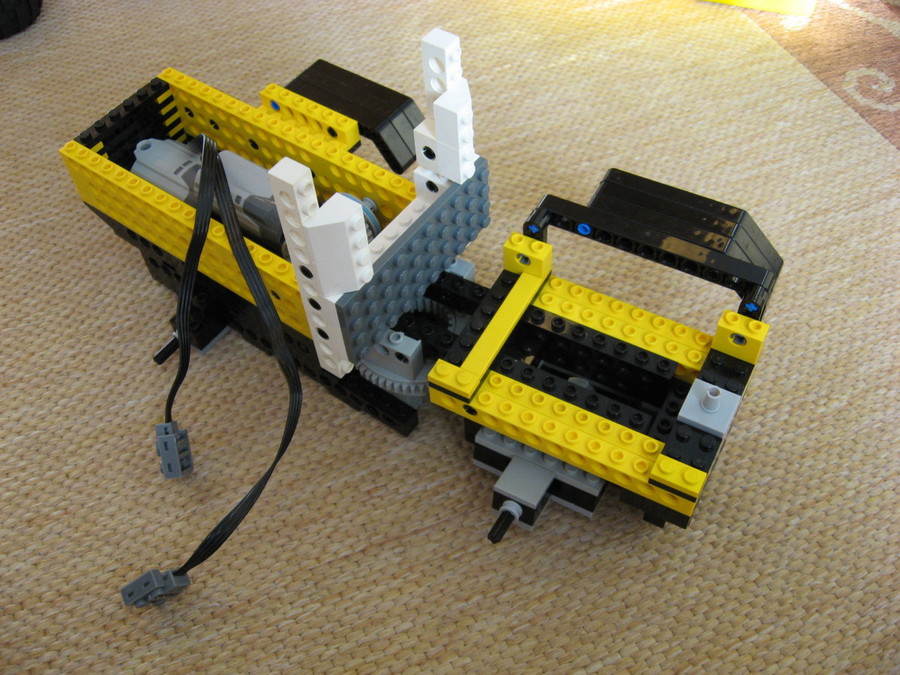
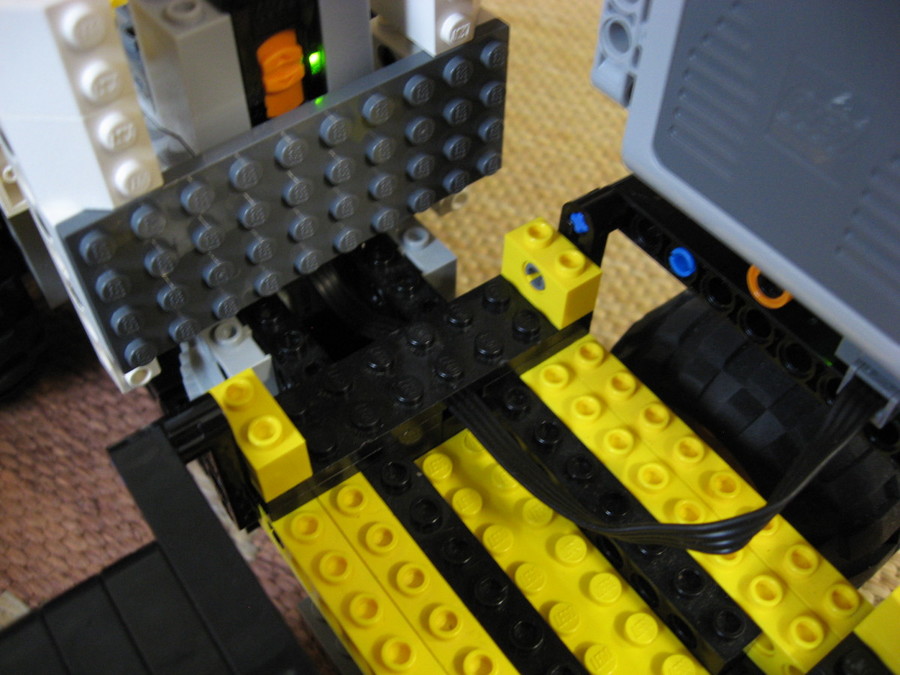 A kábelre a tervezésnél nem gondoltam, de aztán javítottam a hiányosságomat :-)
A kábelre a tervezésnél nem gondoltam, de aztán javítottam a hiányosságomat :-)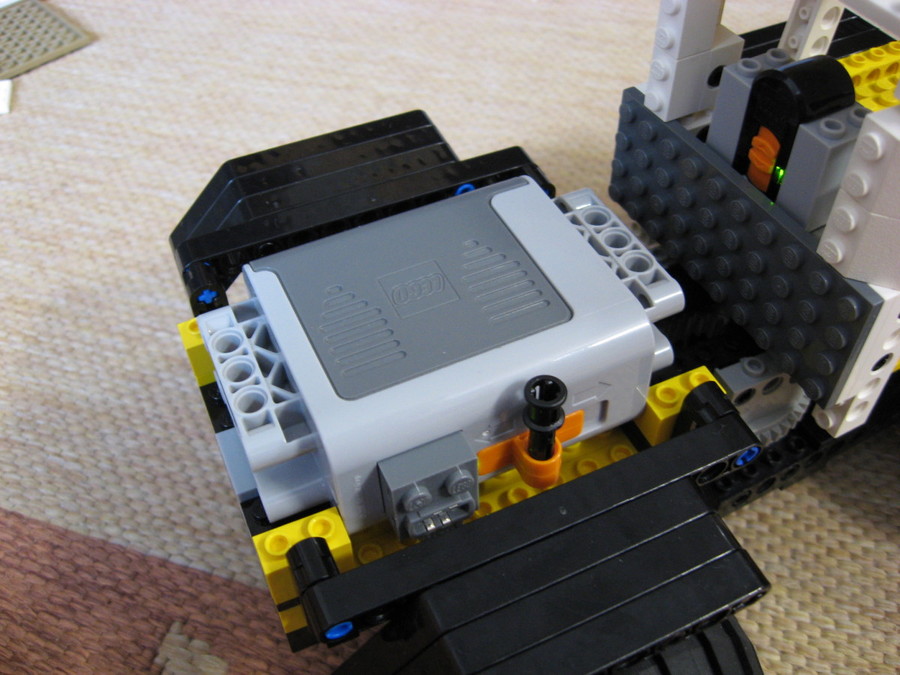
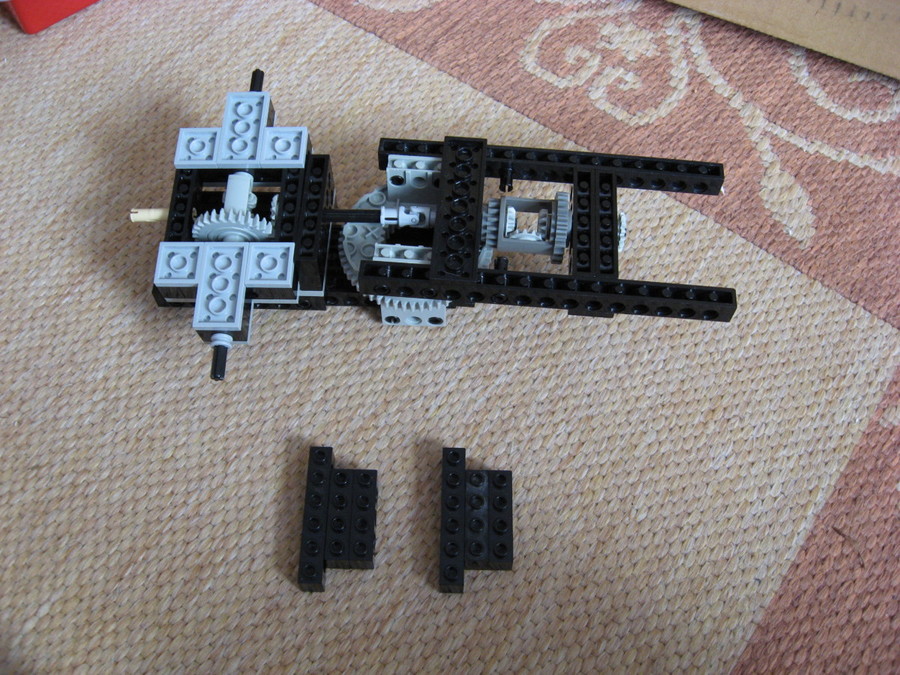
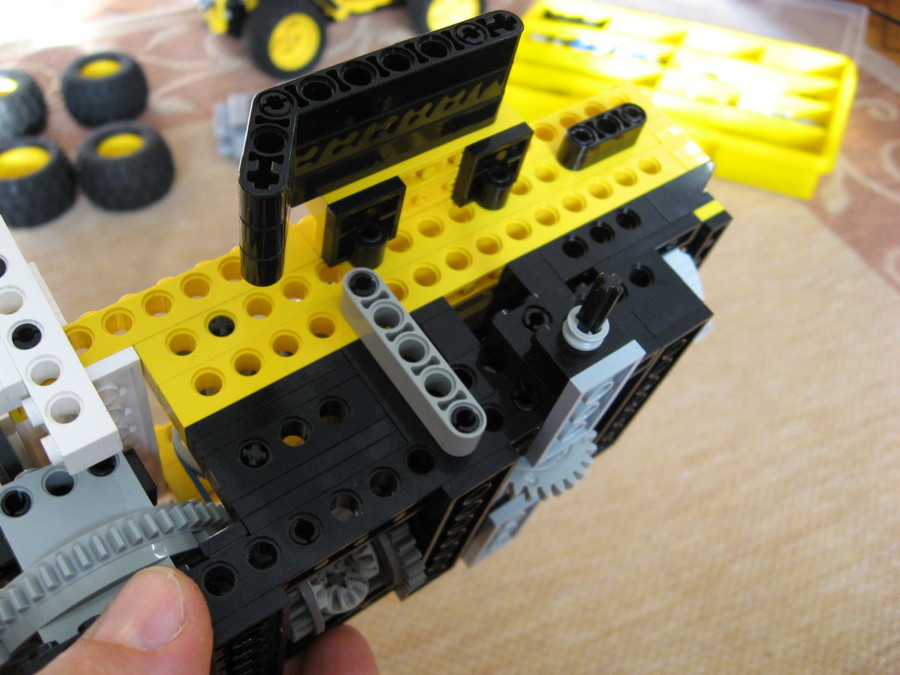
 Stabilizáló igazítások...
Stabilizáló igazítások...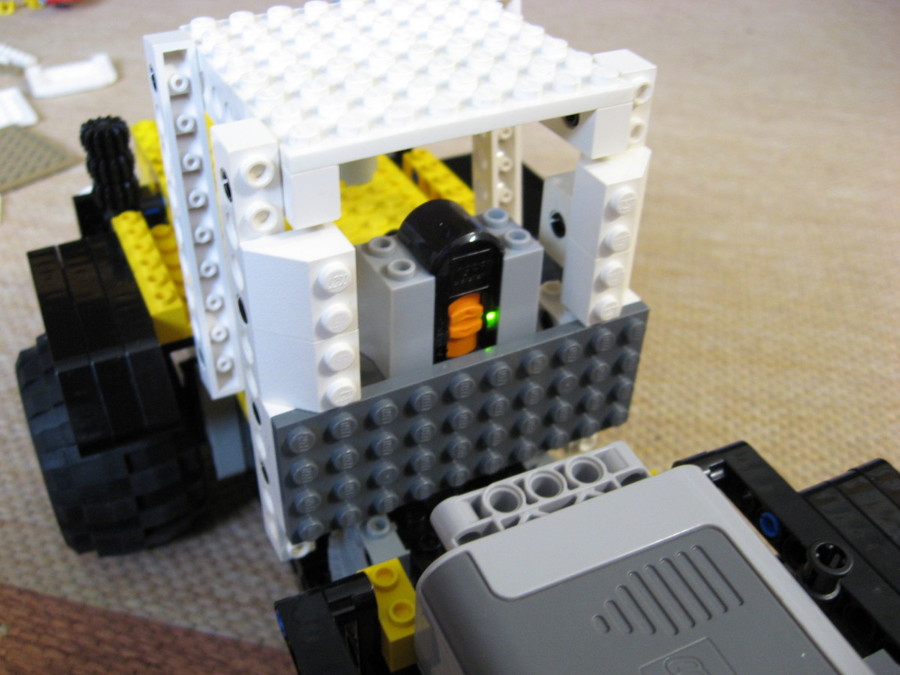
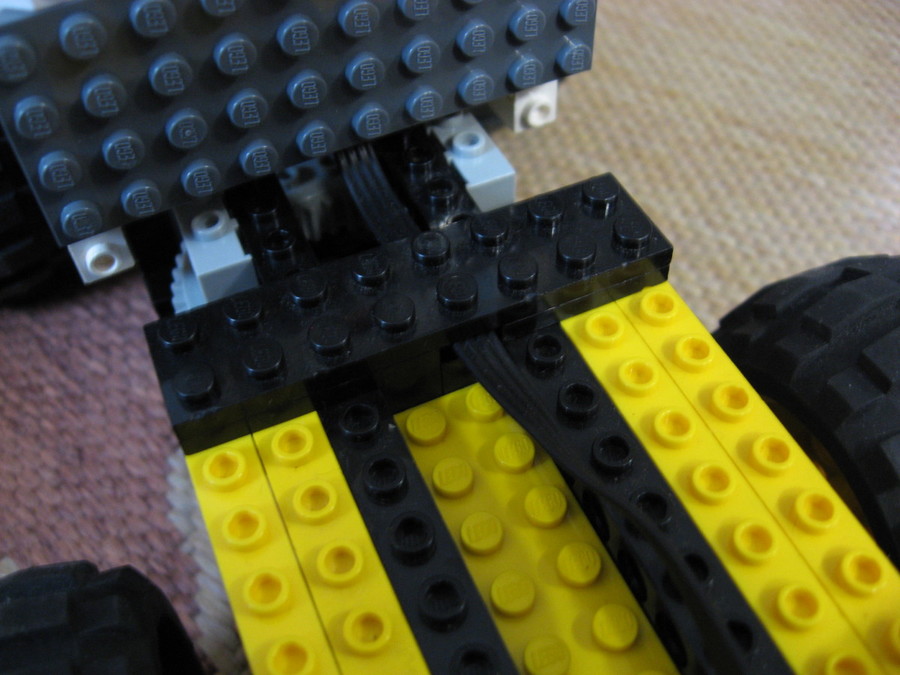
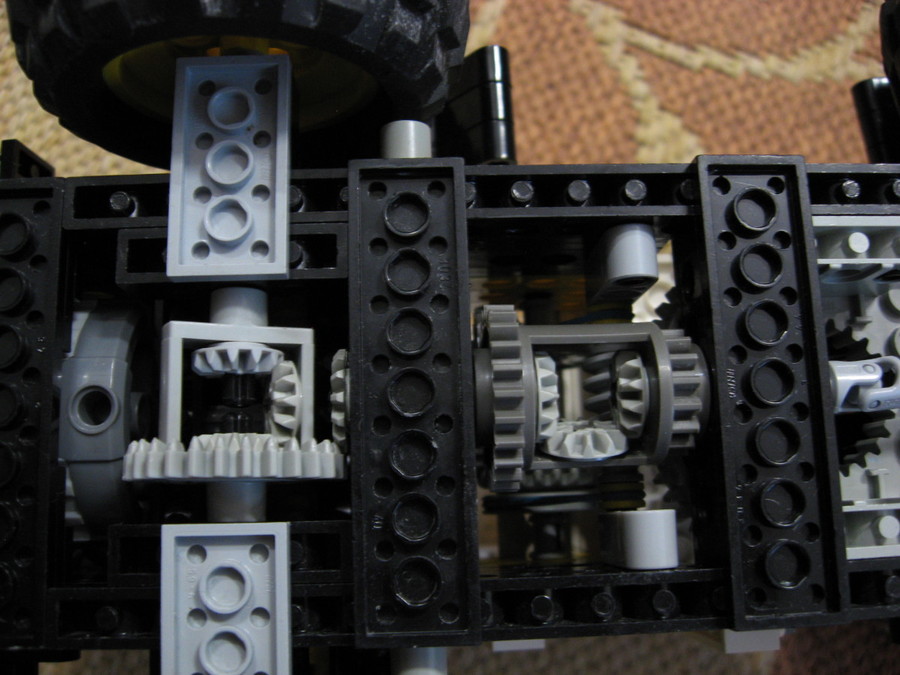 A két diffi közti 4-es tengely terepen szétcsúszott, 5-ös kellene, ha beférne...
A két diffi közti 4-es tengely terepen szétcsúszott, 5-ös kellene, ha beférne...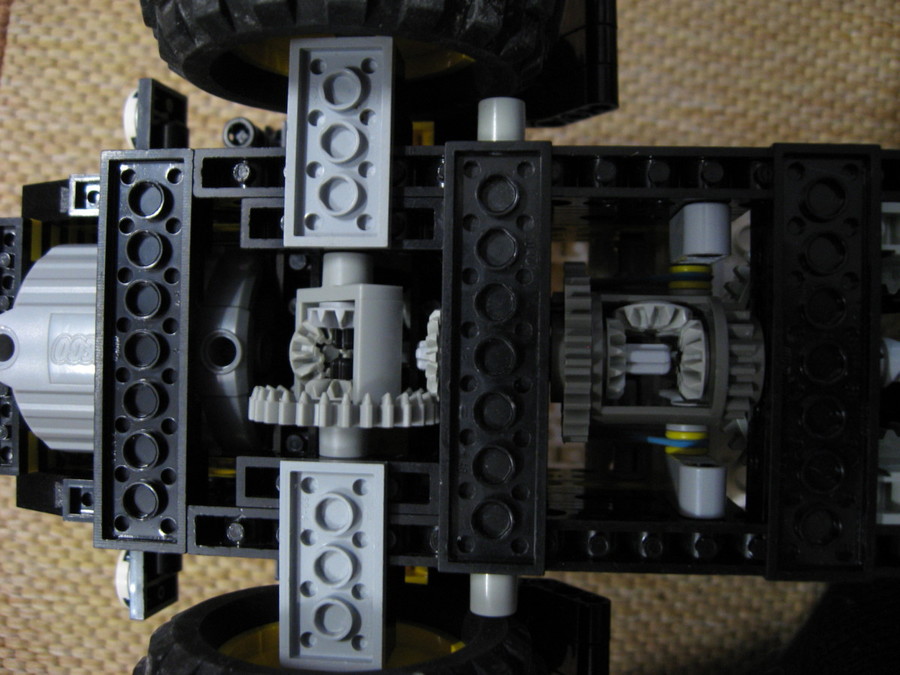 És szerencsére belefért, így már stabil a megoldás!
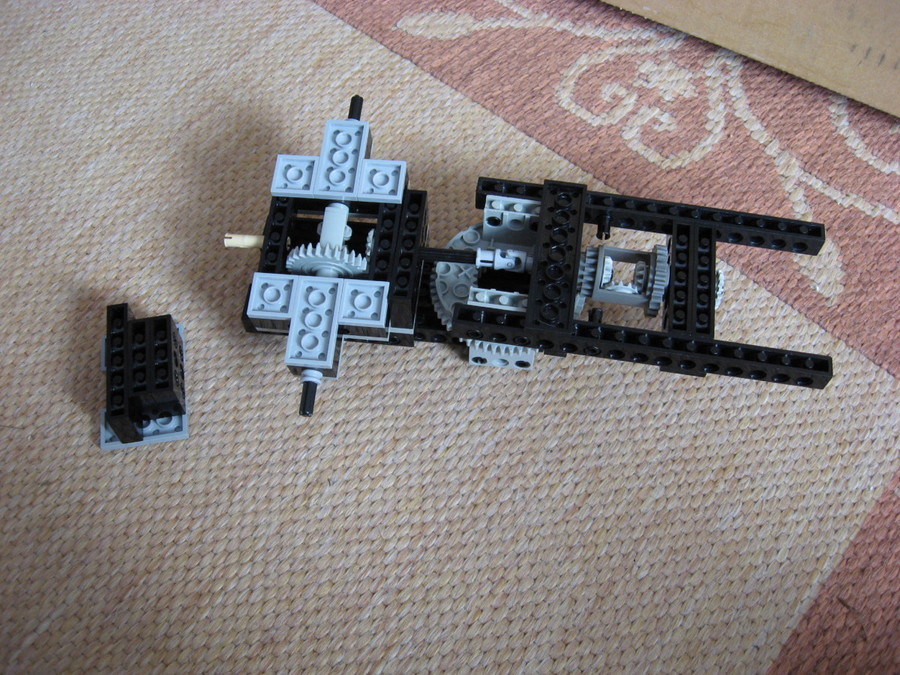
És szerencsére belefért, így már stabil a megoldás!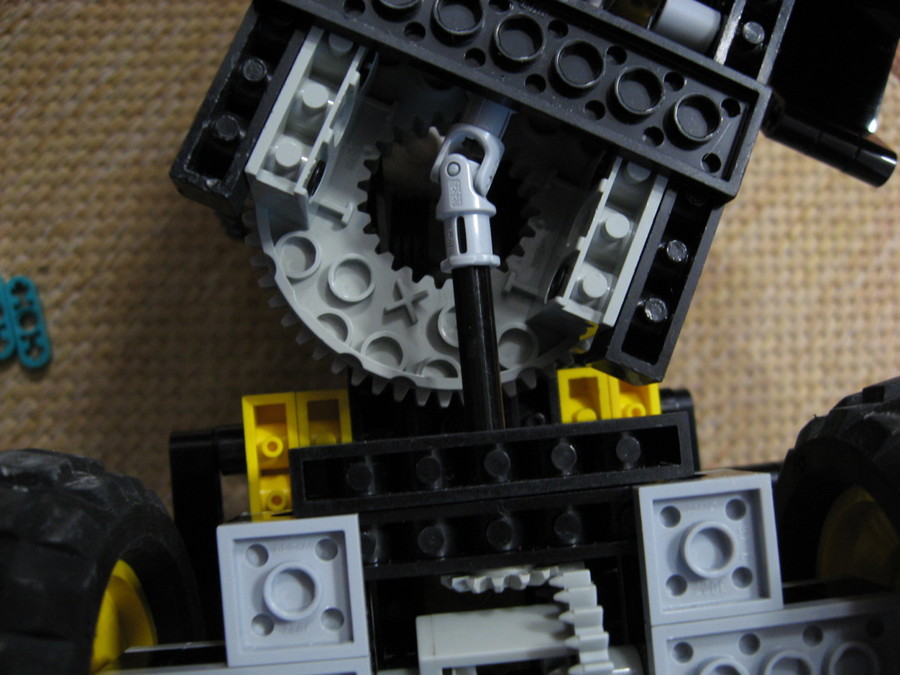 Hosszan vezettem a tengelyt megvezetés nélkül...
Hosszan vezettem a tengelyt megvezetés nélkül...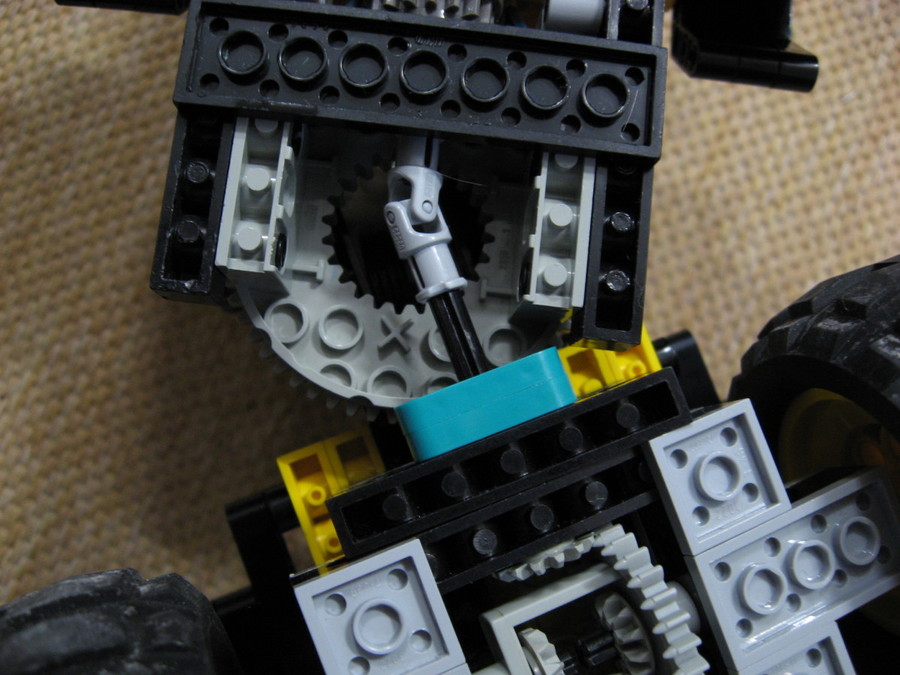 Ez a furazöld alkatrészpár nem zavarja a kormányzást és rövidíti a szabadon álló tengelyhosszt is.
Ez a furazöld alkatrészpár nem zavarja a kormányzást és rövidíti a szabadon álló tengelyhosszt is. A Digital Designer alkatrész listája
A Digital Designer alkatrész listája 2015 május 13, 21:55
- 2016 LEGO Újdonságok
- 2017 LEGO® Újdonságok
- 2018 LEGO® Újdonságok
- 2019 LEGO® Újdonságok
- 2020 LEGO® Újdonságok
- 2021 LEGO® Újdonságok
- 2022 LEGO® Újdonságok
- 2023 LEGO® Újdonságok
- 2024 LEGO® Újdonságok
- 60. évfordulós készletek
- Angry Birds
- Animal Crossing™
- Architecture
- Art
- Atlantis
- Avatar
- Bionicle
- Brick Sketches™
- BrickHeadz
- Chima
- City
- Classic
- Creator 3-in-1
- Creator Expert
- DC
- Disney Princess™
- Disney™
- DOTS
- DREAMZzz™
- DUPLO®
- Elves
- Fortnite™
- Friends
- Gabby babaháza
- Ghostbusters™
- Gyűrűk Ura
- Harry Potter™
- Hidden Side
- ICONS
- Ideas - CUUSOO
- Indiana Jones
- Juniors
- Jurassic World
- Kaland - LEGO Movie
- Karib tenger kalózai
- Kastély, LEGO Vár (Kingdoms)
- Large Models
- Lone Ranger
- Marvel
- MINDSTORMS®
- Minecraft™
- Minions®
- Mixels
- Monkie Kid™
- Monster Fighters
- NEXO KNIGHTS™
- NINJAGO®
- Overwatch®
- Pirates
- Polybag - Mini készletek
- Power Functions
- Powered Up
- Scooby-Doo
- Sérült doboz
- Sonic the Hedgehog™
- Speed Champions
- Star Wars™
- Star Wars™ gyűjtői készletek
- Stranger Things
- Super Mario
- Technic
- The Legend of Zelda™
- THE LEGO® BATMAN MOVIE™
- Trollok®
- Ultimate Collector Series
- Ultra Agents
- Unikitty™
- VIDIYO™
- Wednesday
- Wicked
- Xtra
- További készletek
Értesülj elsőként a vásárláshoz járó ajándékokról, újdonságokról!

Elfogadom az adatvédelmi szabályzatot
JöhetTörlöm