Vonal követő robot - MOC
Korábban készítettem egy építési naplót ennek a robotnak a programozásáról és működéséről, most megmutatom, hogy hogyan lehet megépíteni! A készlet a kedvencem az összes lego között, de így nyár időben nem nagyon van időm foglalkozni vele sajnos. Ez a napló is úgy készült, hogy a korábban megépített robotot el kellett bontanom, igazából bontási naplót láthattok fordított sorrendben :-)
Erről a szerkezetről már elég sokat írtam abban a fent belinkelt naplóban, ezért most inkább kedvcsinálóul leírom a szenzorok és motorok tulajdonságait azoknak, akik érdeklődnek a Mindstorms irányában, de még nem szerezték be a saját készletüket, hátha ez előbbre lendíti a dolgot. Nem vagyok önzetlen, bevallom szívesen és érdeklődéssel olvasnám mások naplóit ebben a témáben itt a jövőben :-)
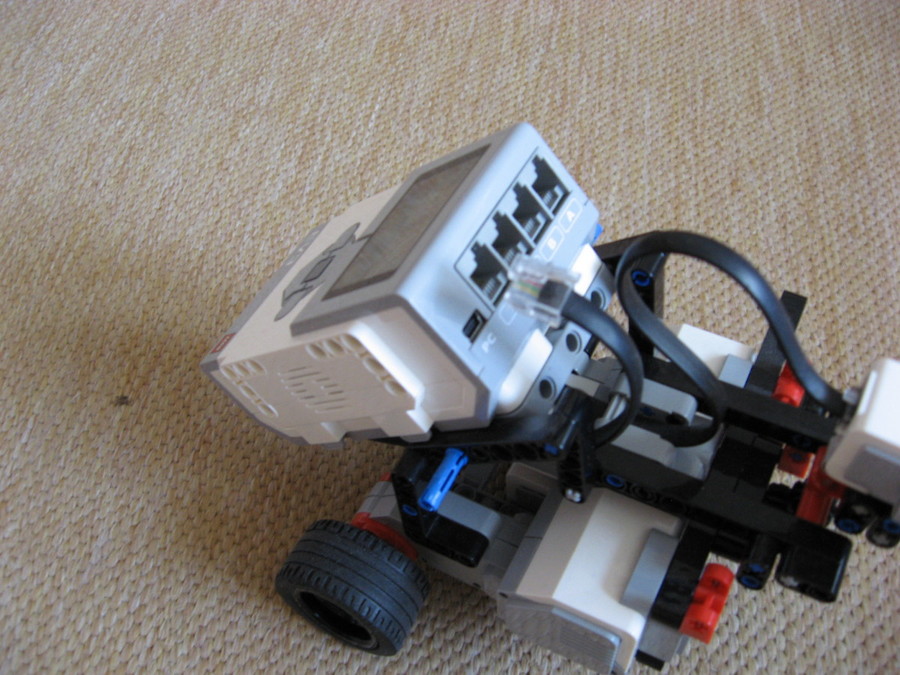
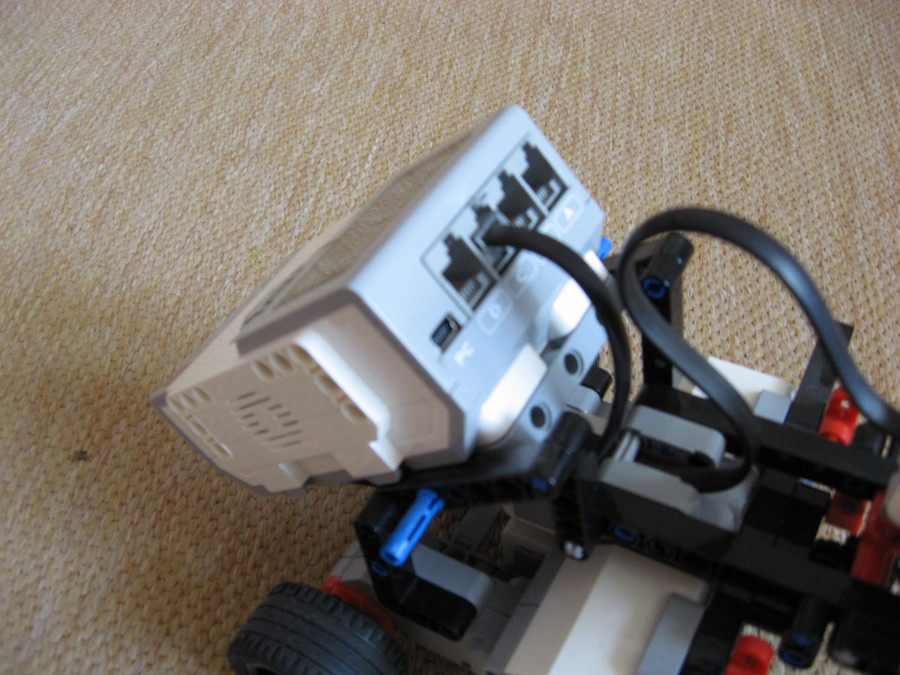
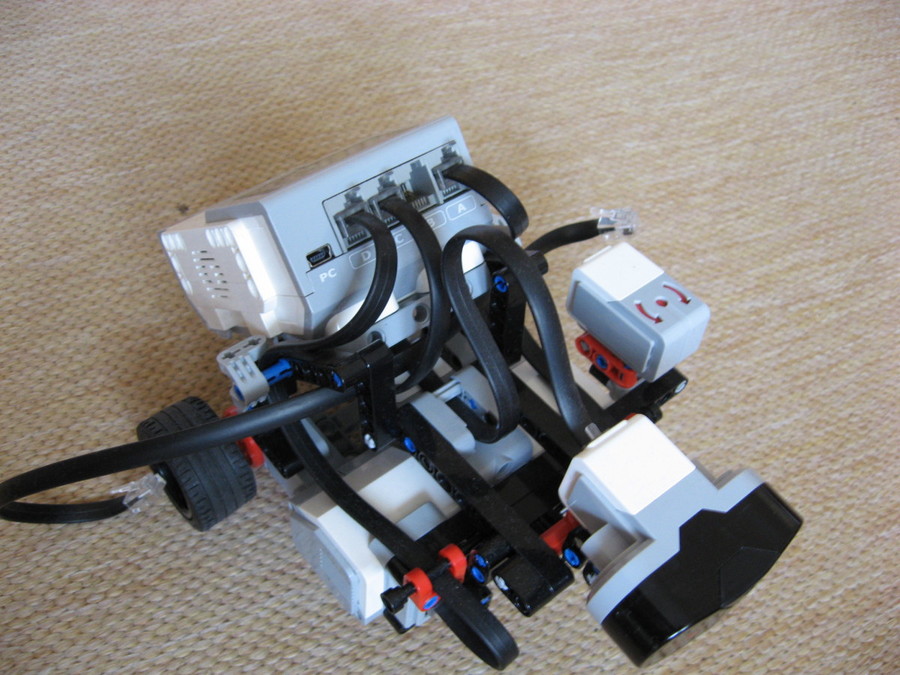
Azt mondják az EV3 Brick-ről, hogy 4 kimenettel és négy bemenettel rendelkezik, de ez így nem igaz, a valóságban ennél sokkal több ki-bemenete van ennek a kis számítógépnek! Az 1-2-3-4 jelölésű bemeneti portok mellett bemenetként kezelhetjük a Brick gombjait, mivel szabadon használhatjuk őket programozás során, és az A-B-C-D jelölésű motor portok valójában két irányúak, hiszen a motorok meghajtása mellett magukba foglalják a szervók fordulatszám jeladóinak bemeneteit is. Kimenetnek tekinthető még a 177 x 127 pixeles folyadékkristályos kijelző, a Brick kis hangszórója is, valamint a Brick nyomógombok piros - narancs - zöld háttérvilágításai is.
A motorok kivezérelhetőek 1-100 tartományban szabályozható teljesítménynel mindkét forgásirányban, és visszakapunk tőlük egy 1 fordulathoz 360 fokot rendelő szögelfordulás mérés alapú pozíciójelet, amelyet a programban akár fokban mért elfordulásra, akár tengelyfordulatokban mért elfordulásra használhatunk.
Az alap készlet tartalmaz egy nyomógomb kapcsolót, amelynek a program 3 állapotát veheti figyelembe: kiengedett állapot, benyomott állapot és koppintott, azaz benyomás követő kiengedett állapot.
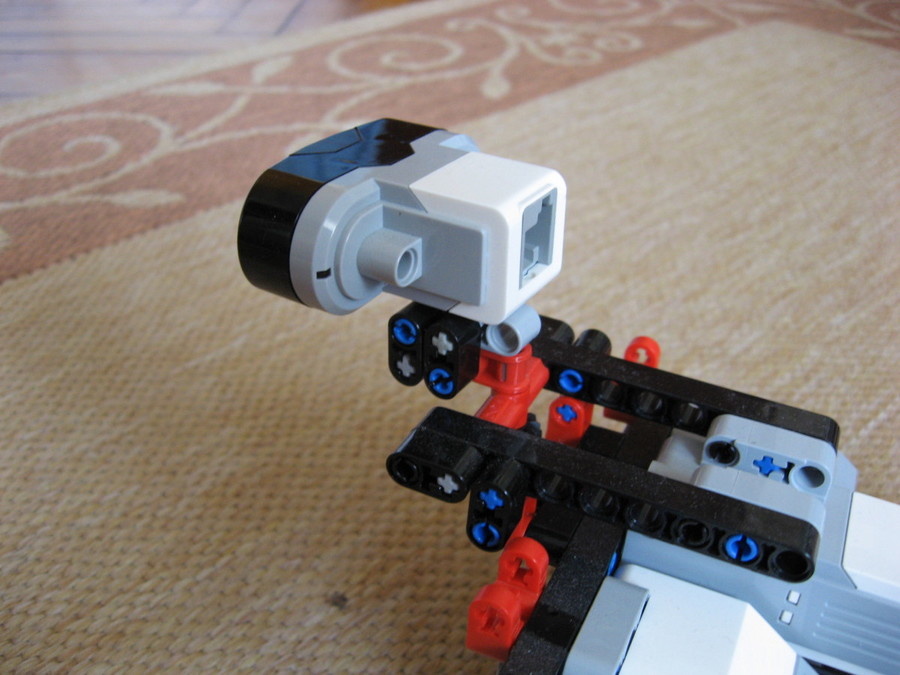
A szín szenzor 3 üzemmódot tud: színfelismerés, amelyben a 6 színt különít el: fekete, kék, zöld, sárga, piros, fehér, és amikor nincs felismerhető szín, akkor a nulla értéket adja. A másik a felület világosságát mutatja 1-100 tartományban, a harmadik a saját fényforrással megvilágított felület világosságát adja 1-100 értéktartományban.
Az infra szenzor távirányító vevőként funkcionál, amikor a távirányító 5 gombjának lenyomását, vagy kombinációinak lenyomását használhatjuk fel a programban. Ez a rendszer is 4 sávon kommunikál, mint az Infra PF rendszer, ráadásul kompatibilis a PF távirányítókkal! Ez a szenzor tud távolságot mérni 0 - 50 cm tartományban, ahol a kimenet 0 értéke a 0 cm-rel, a 100 értéke az 50 cm-rel egyenértékű. Harmadik funkciója az irány szenzor, amikor a távirányító távolságát és irányát adja felhasználásra.
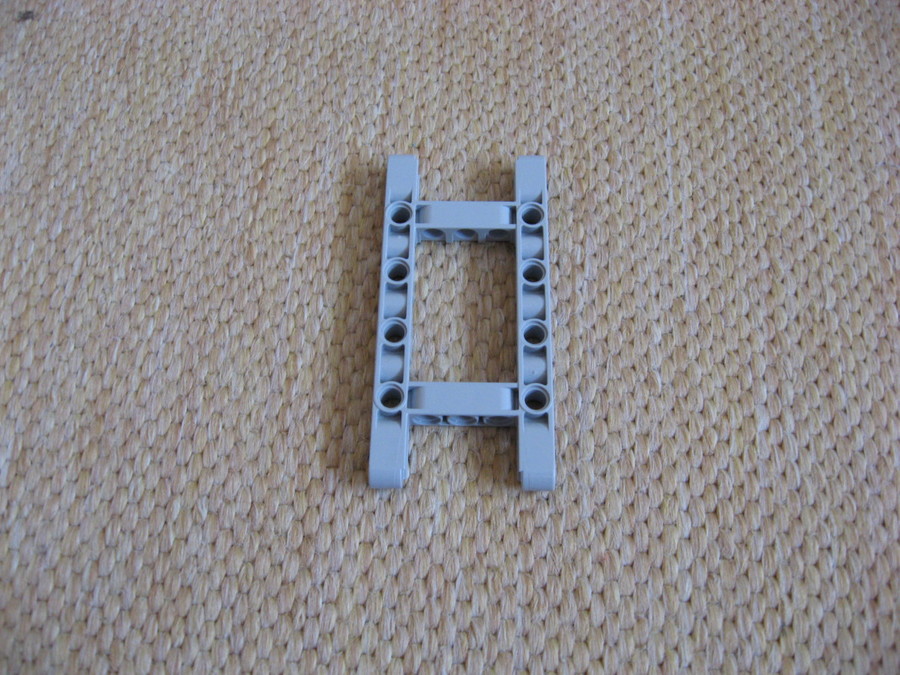
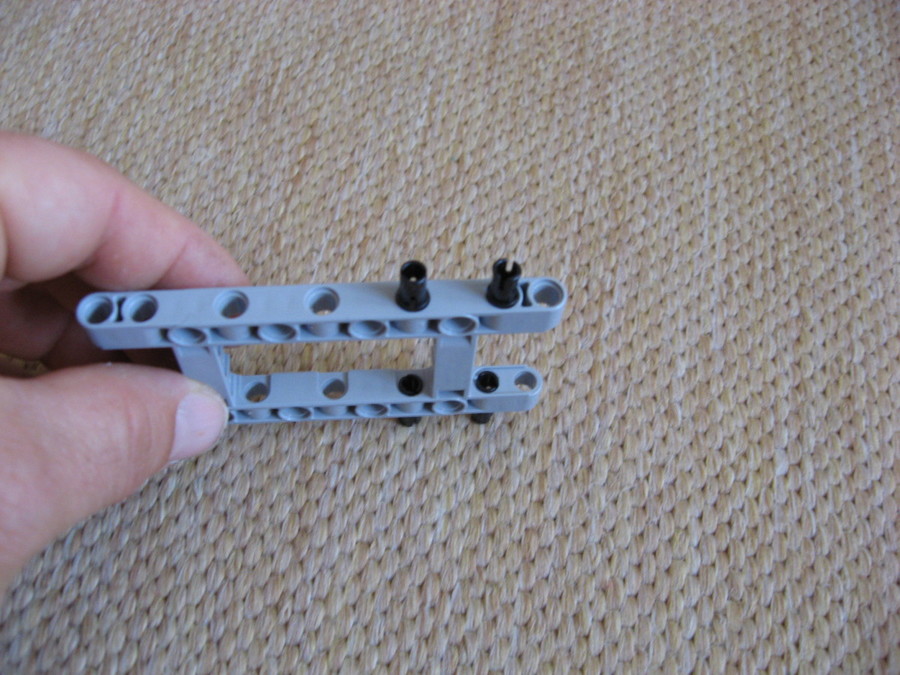
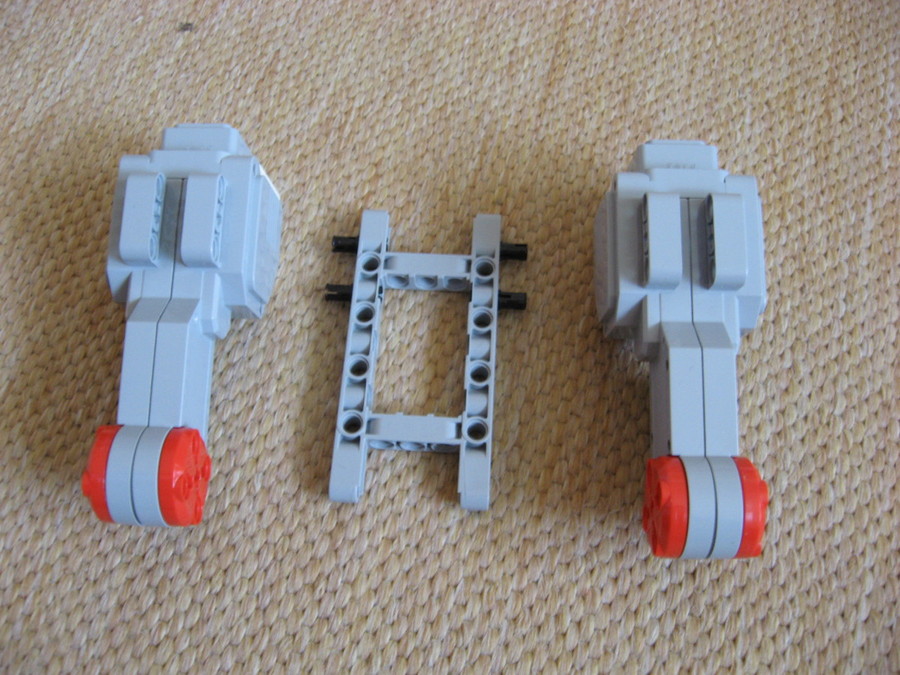
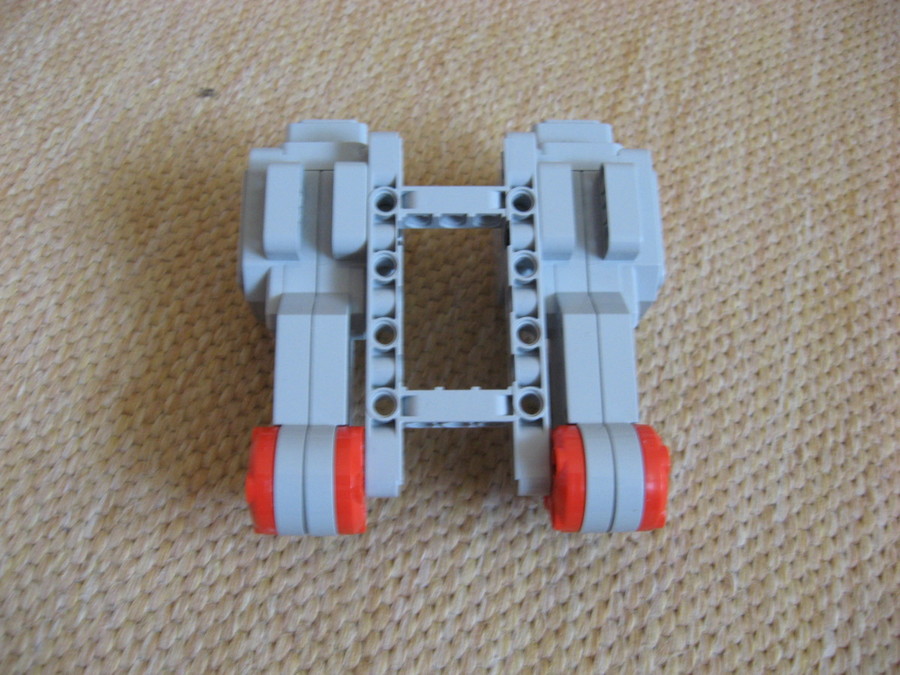
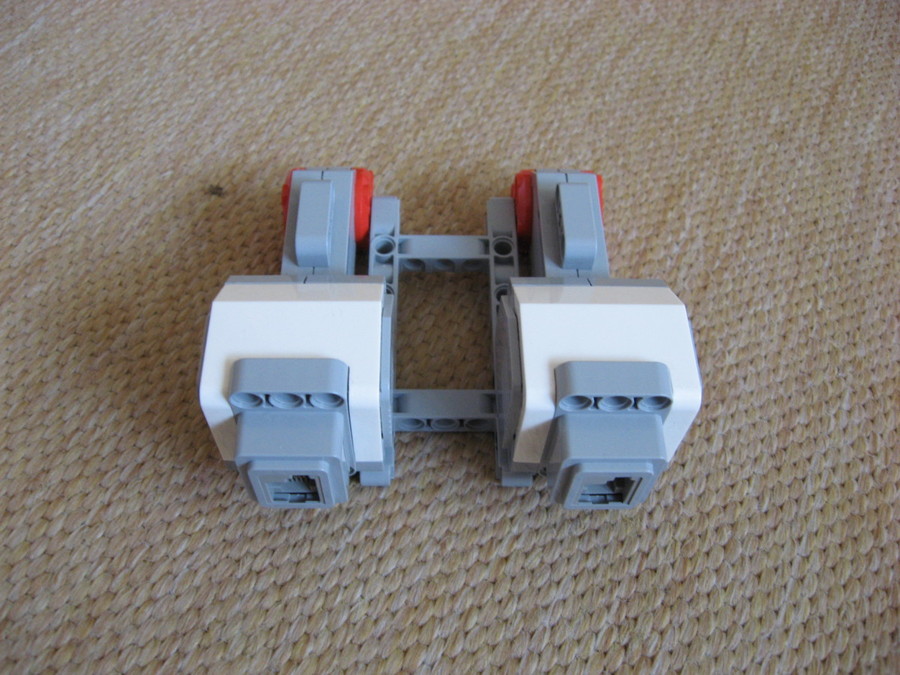
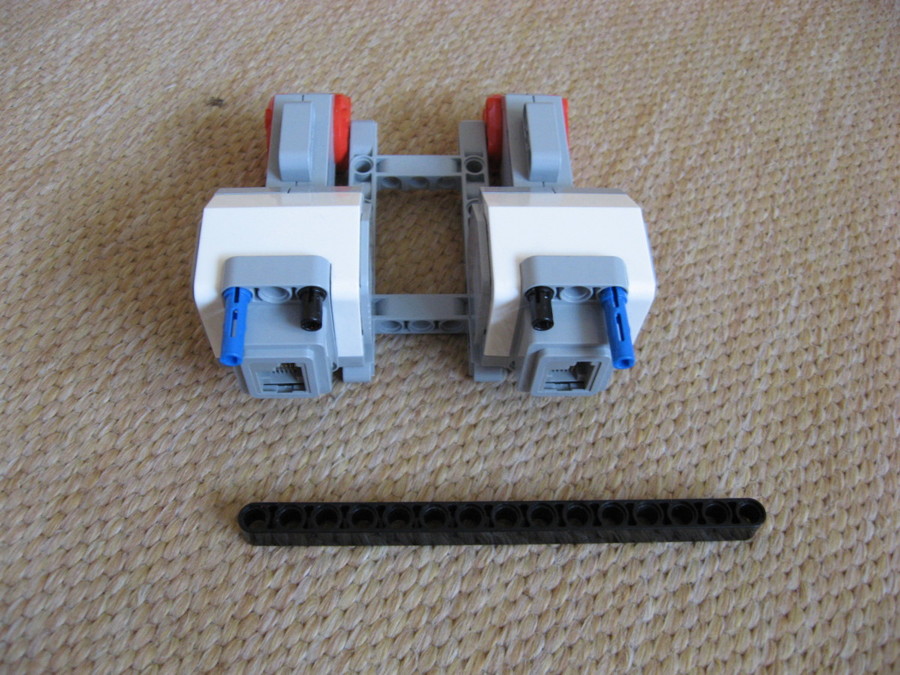
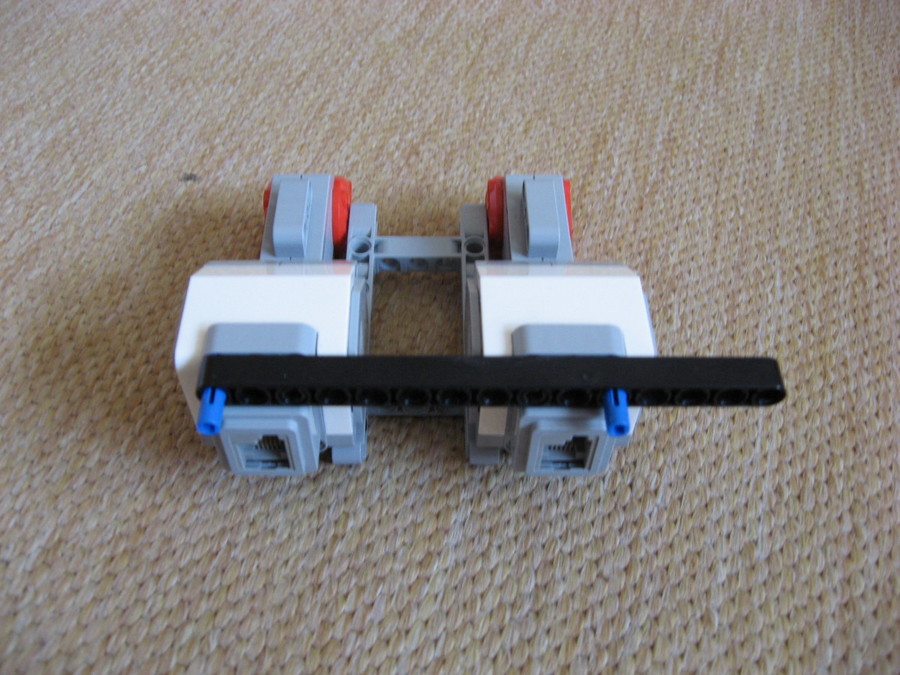
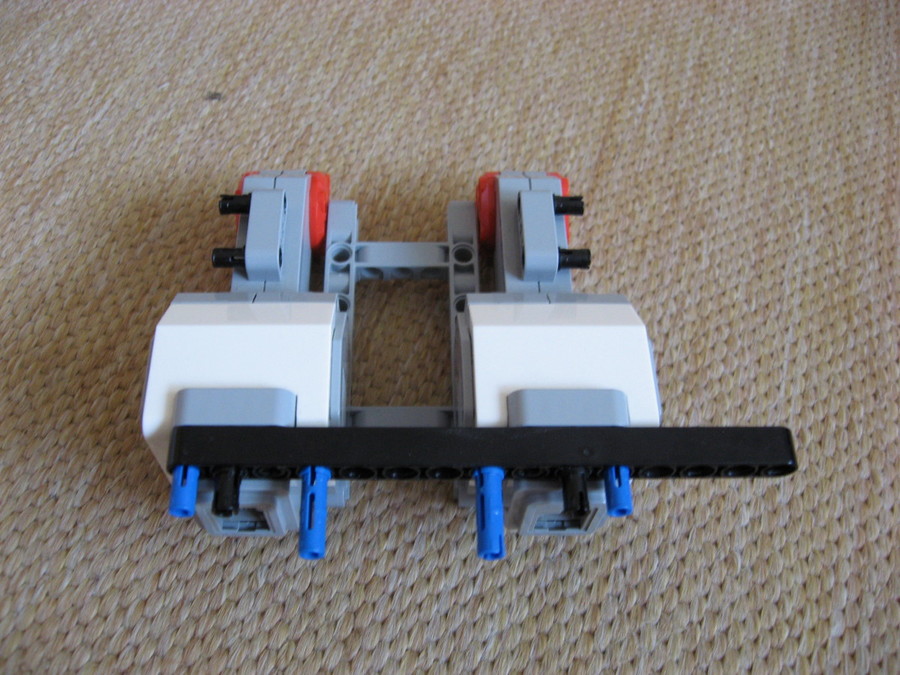
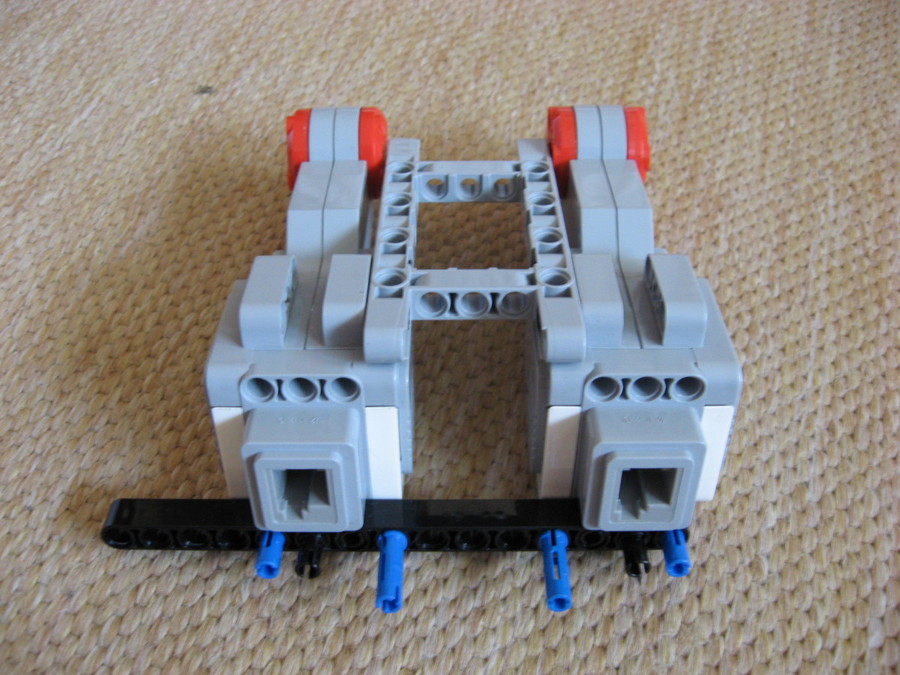
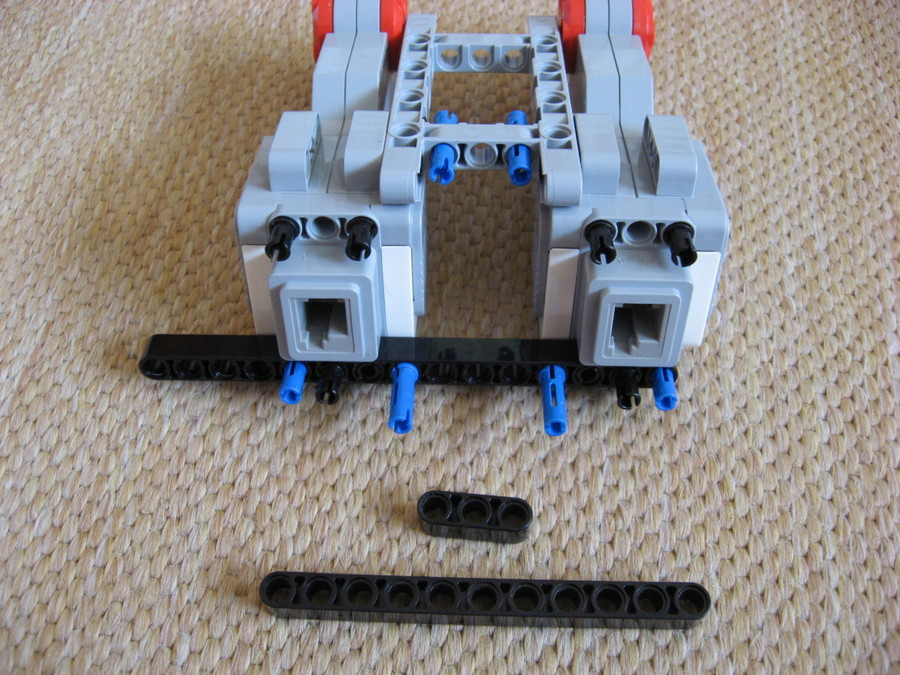
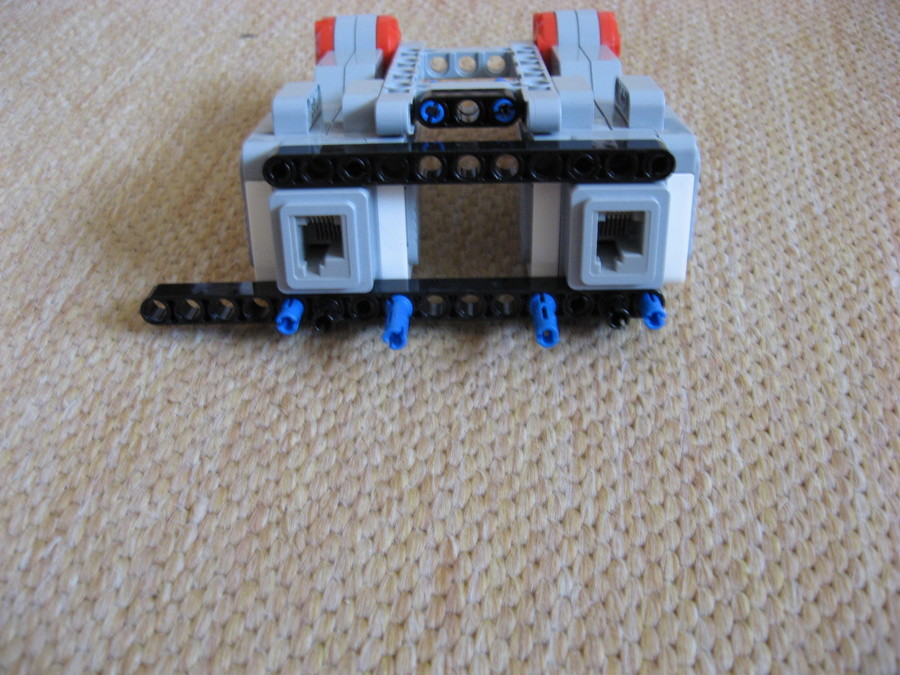
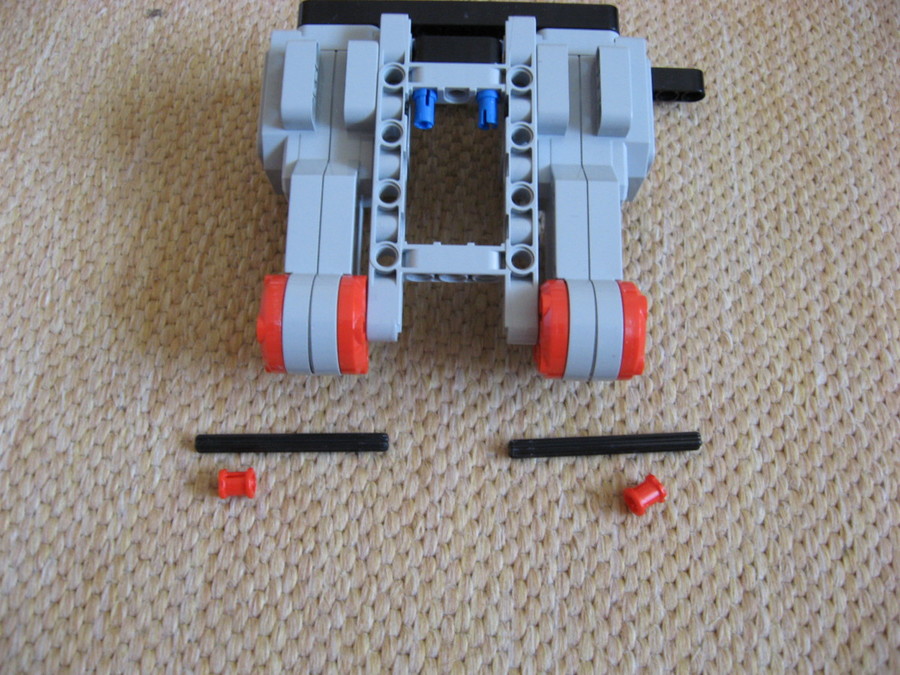
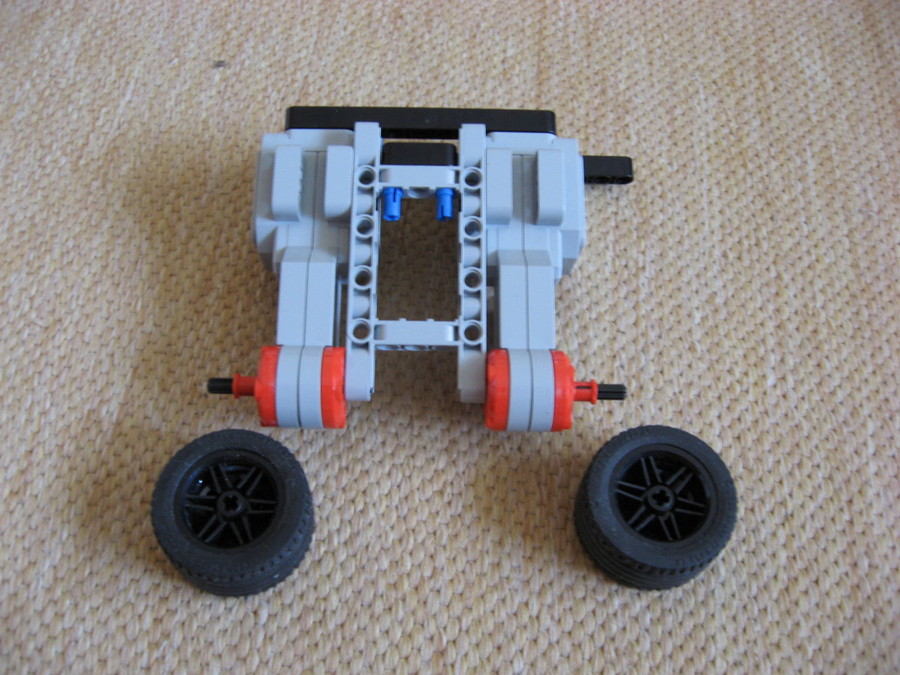
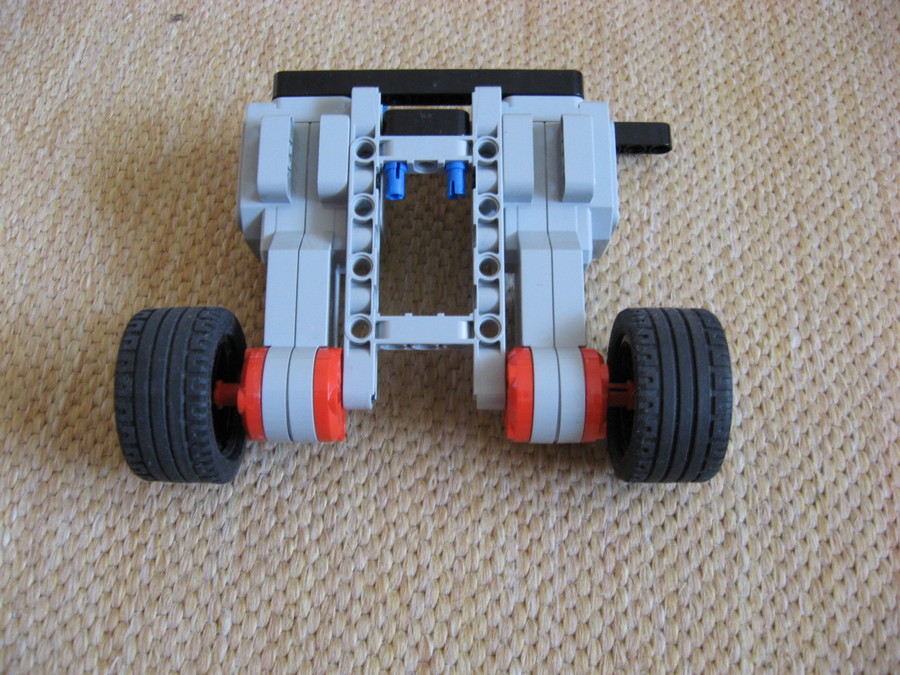
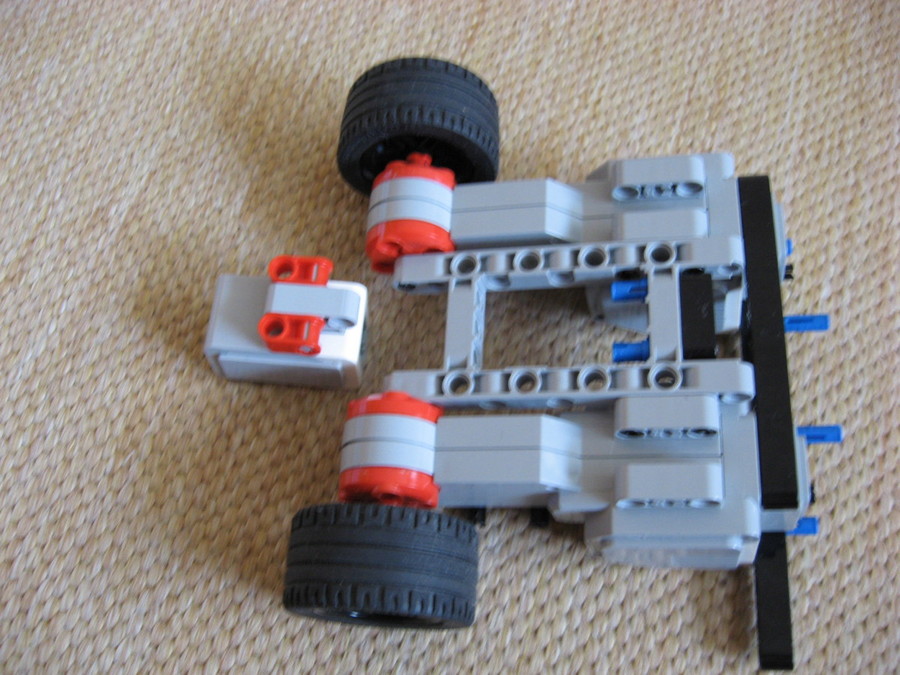
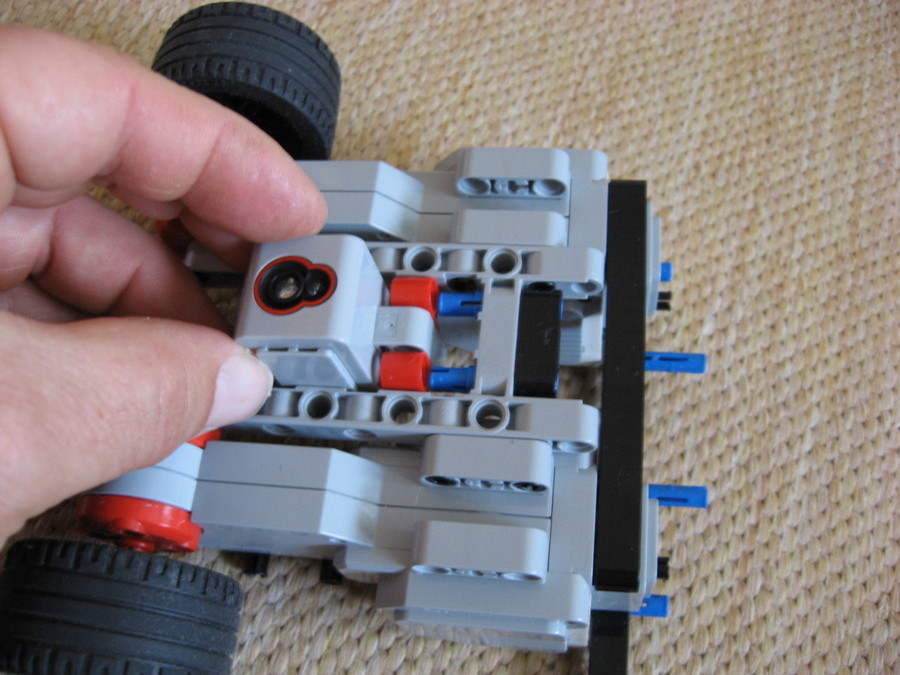
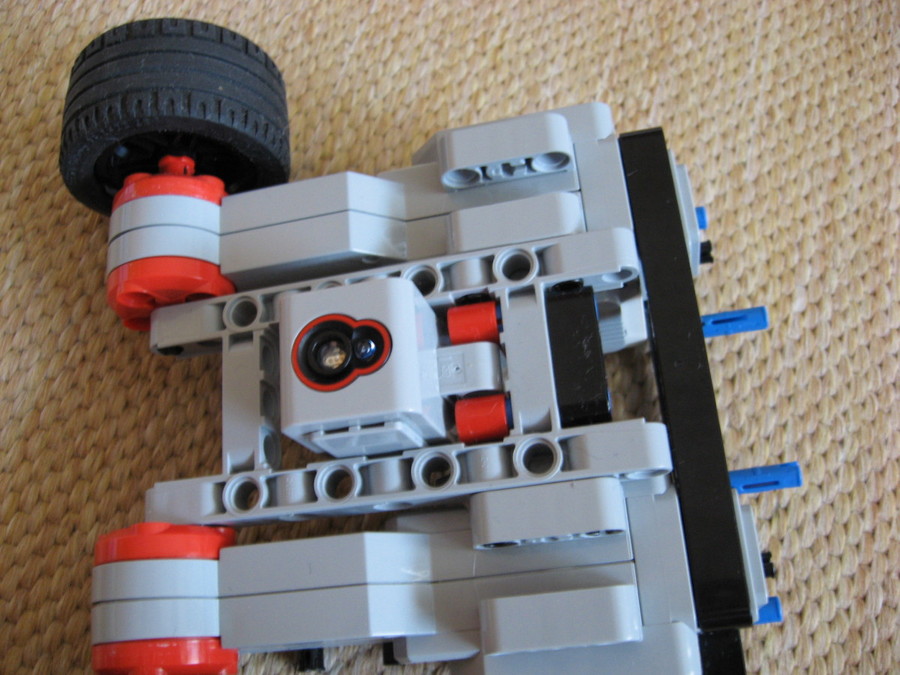
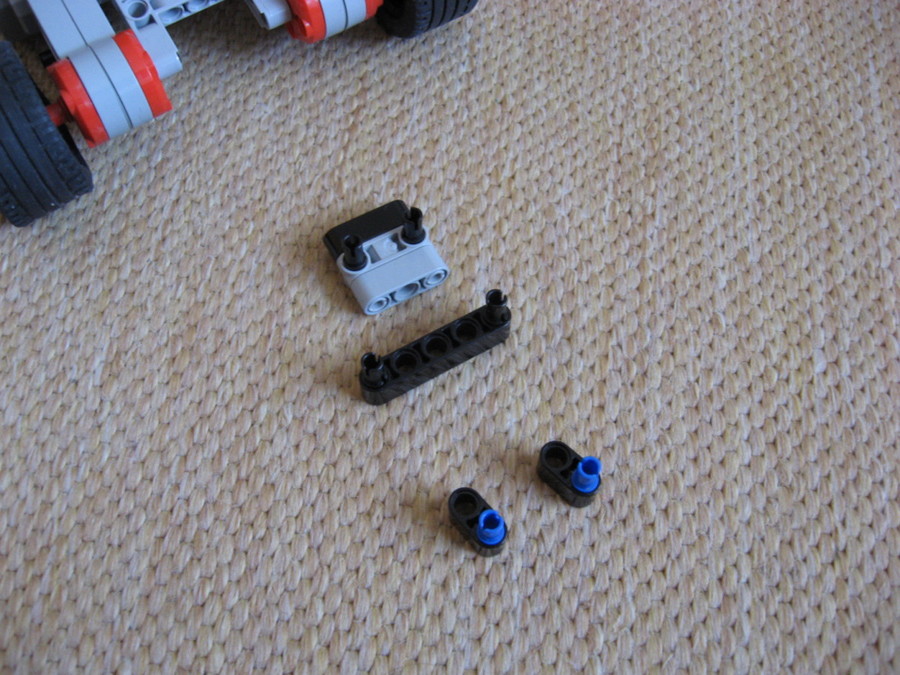
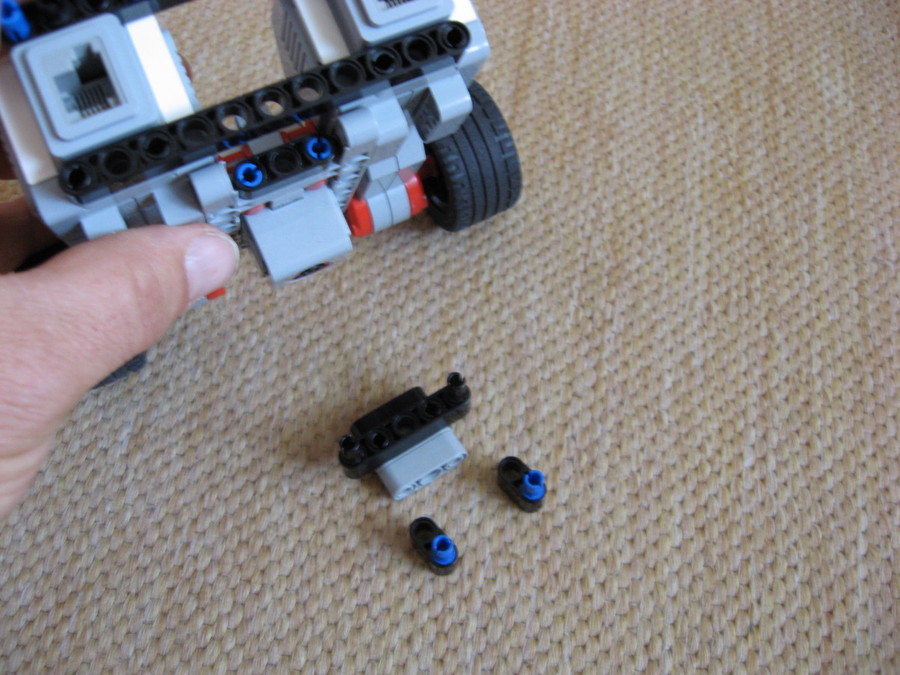
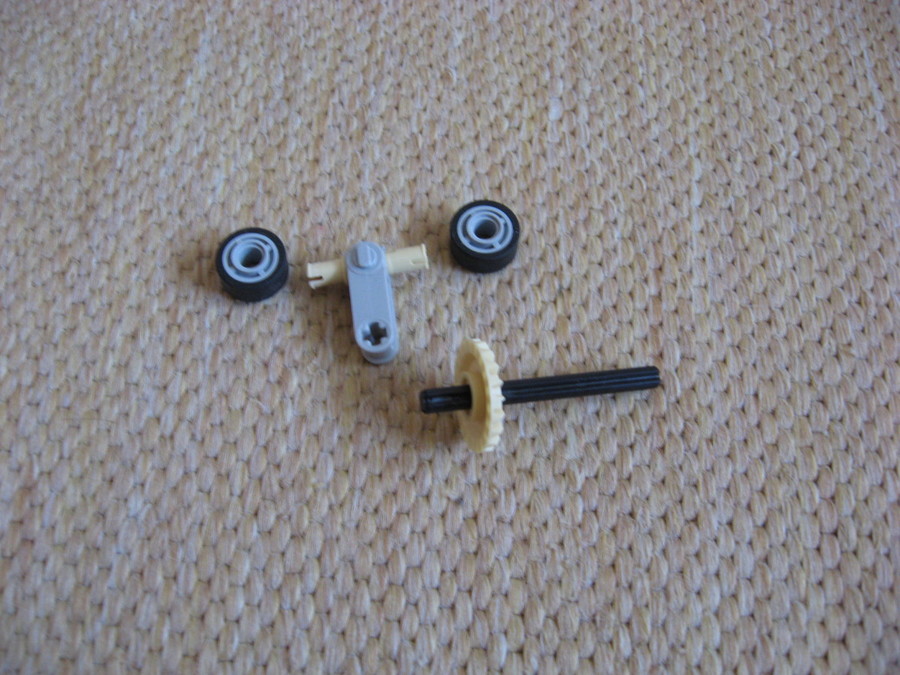
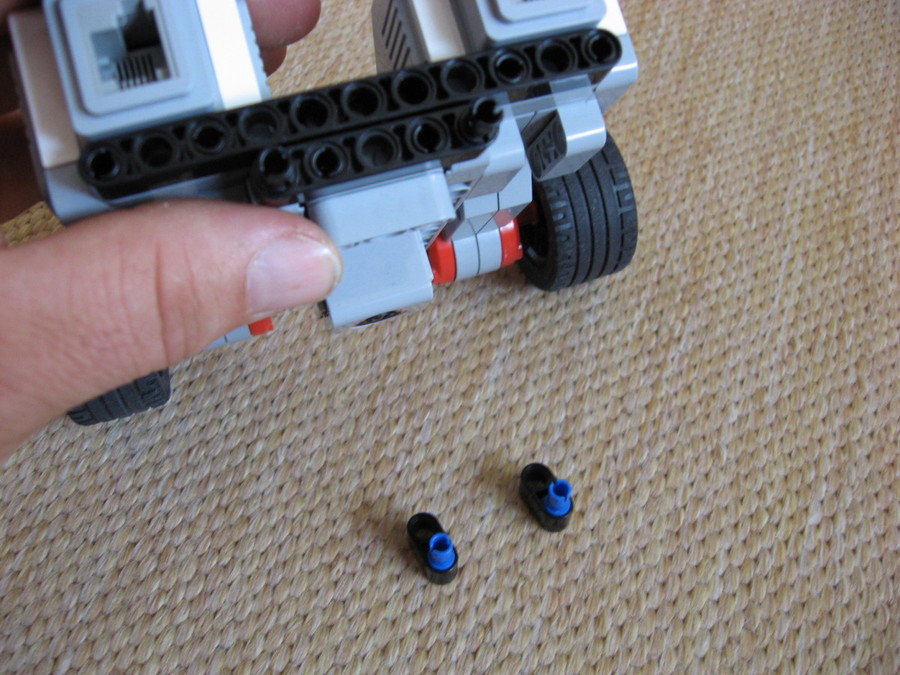
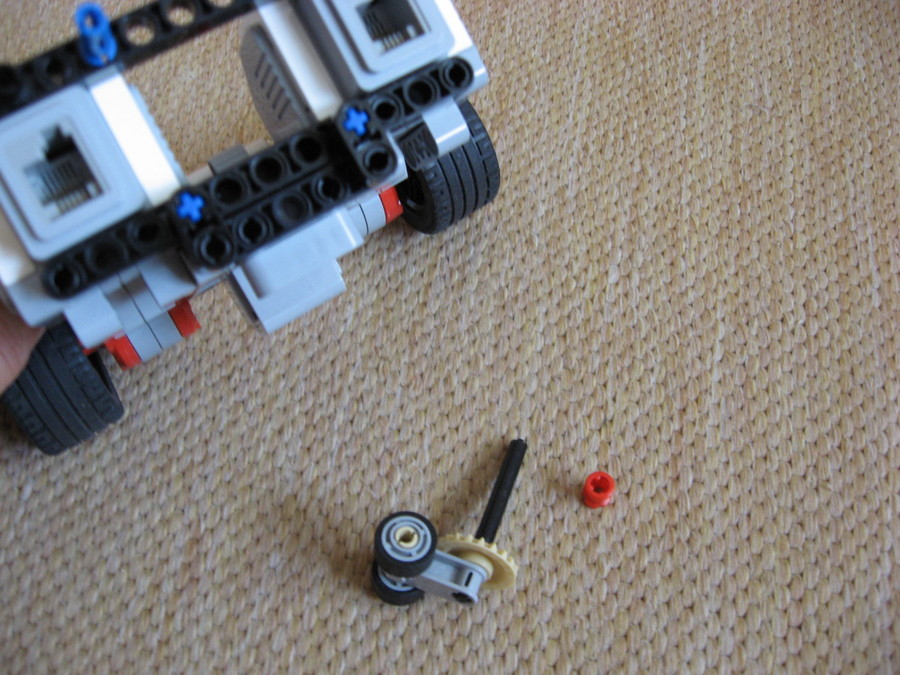
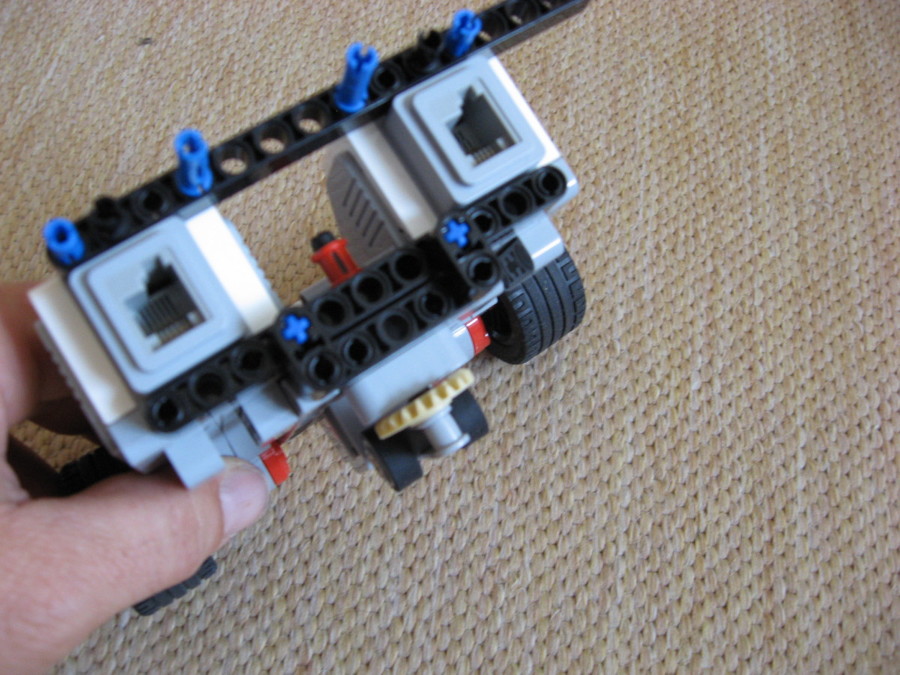
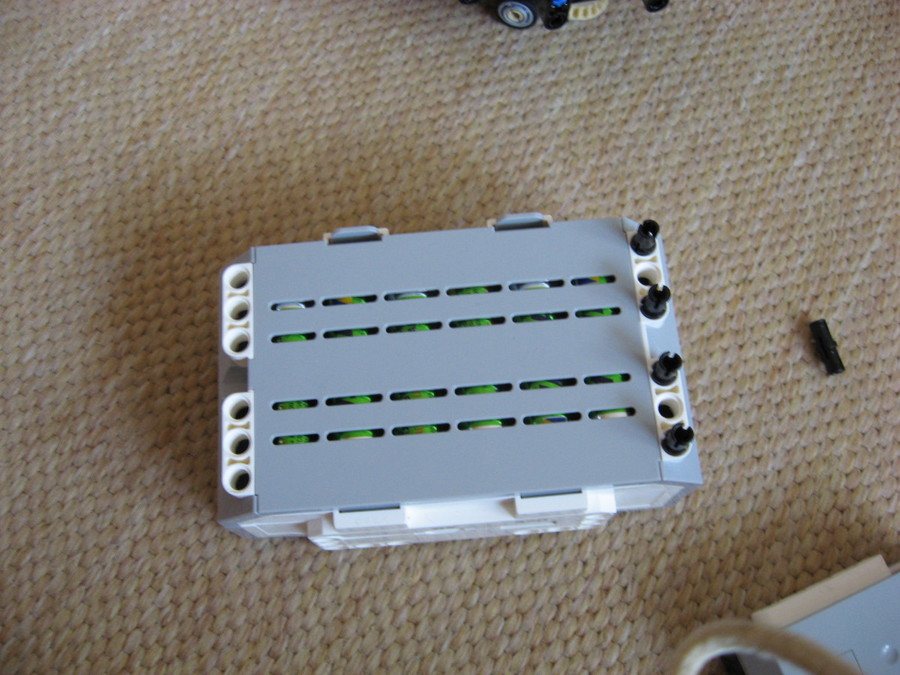
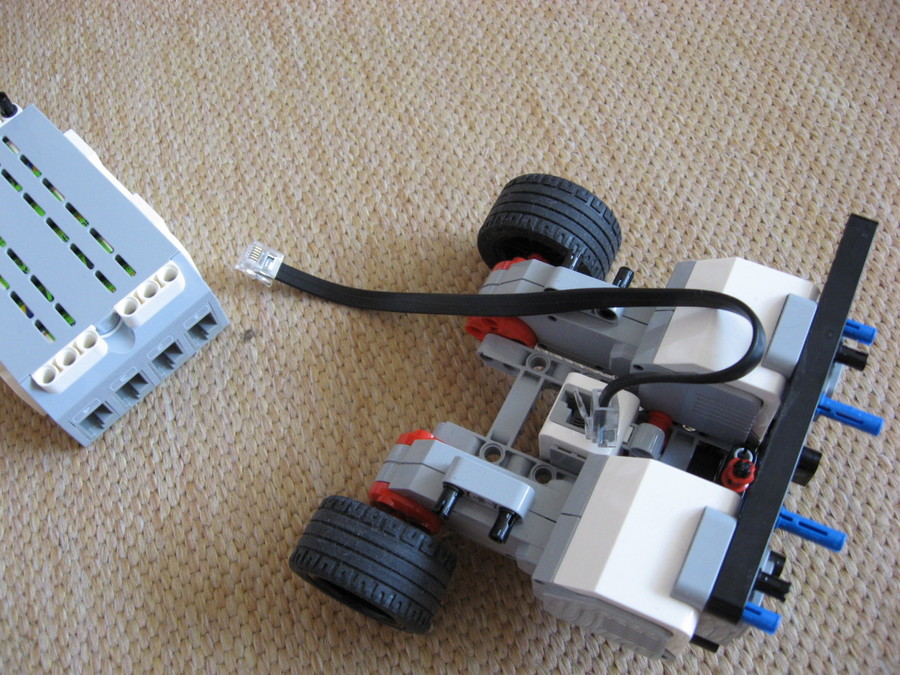
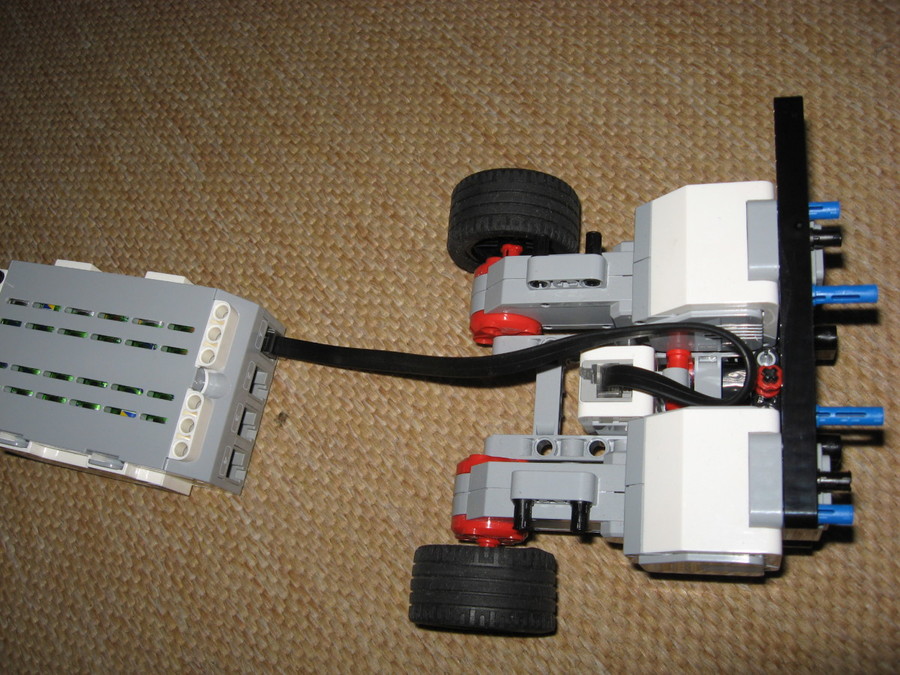
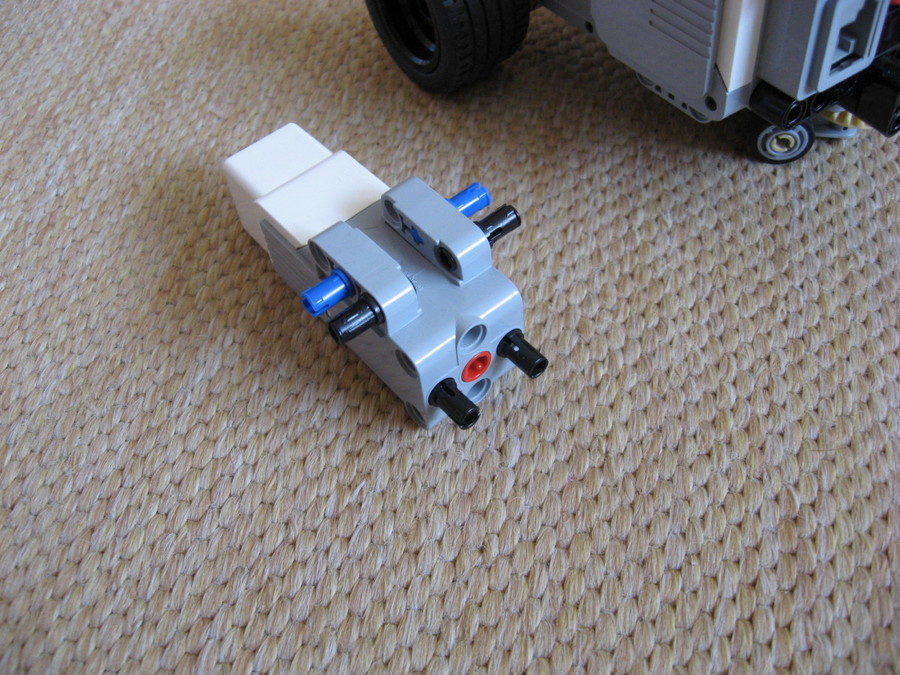
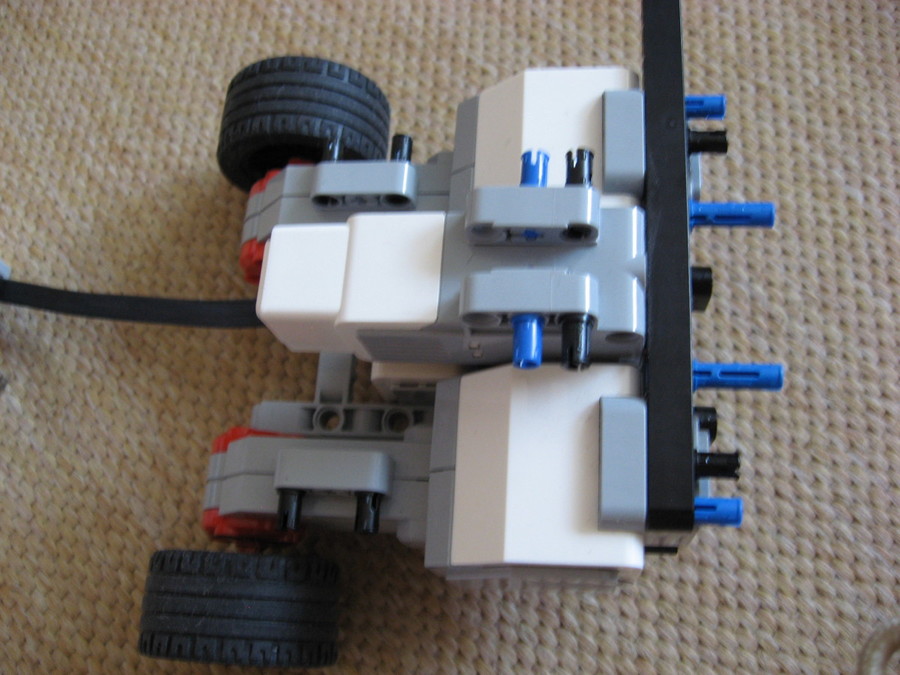
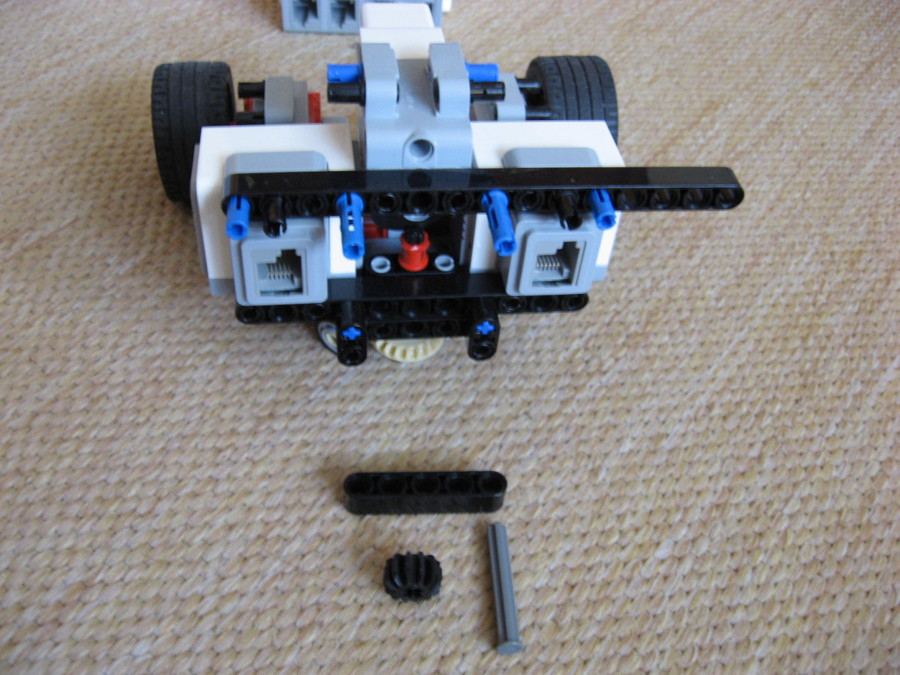
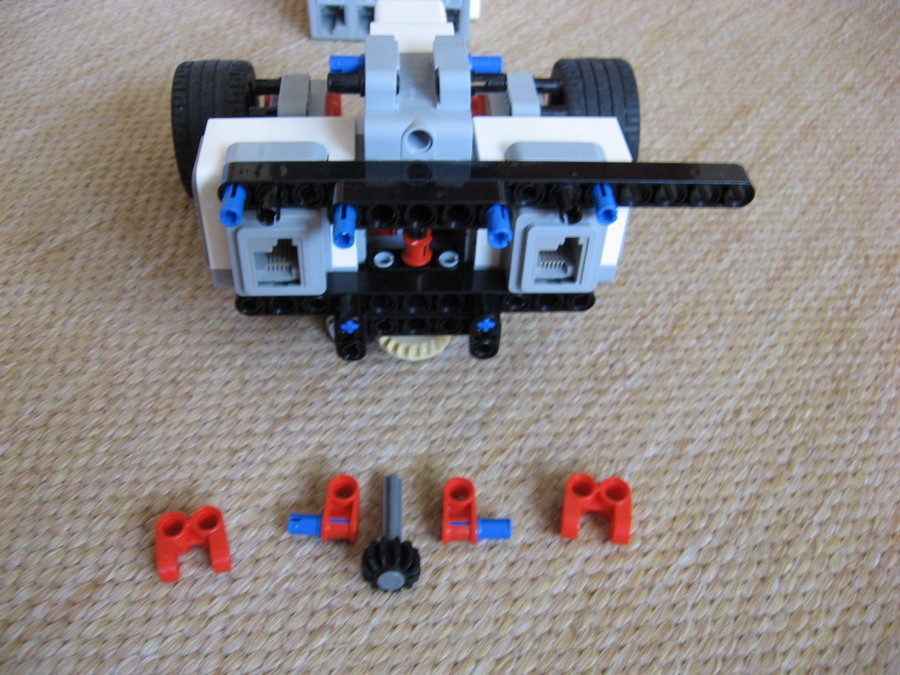
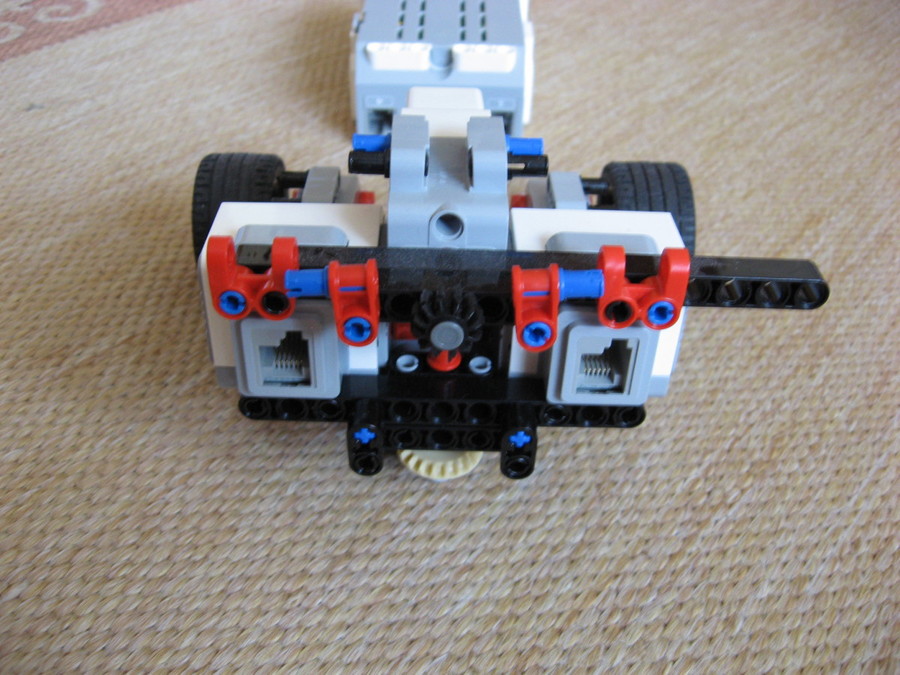
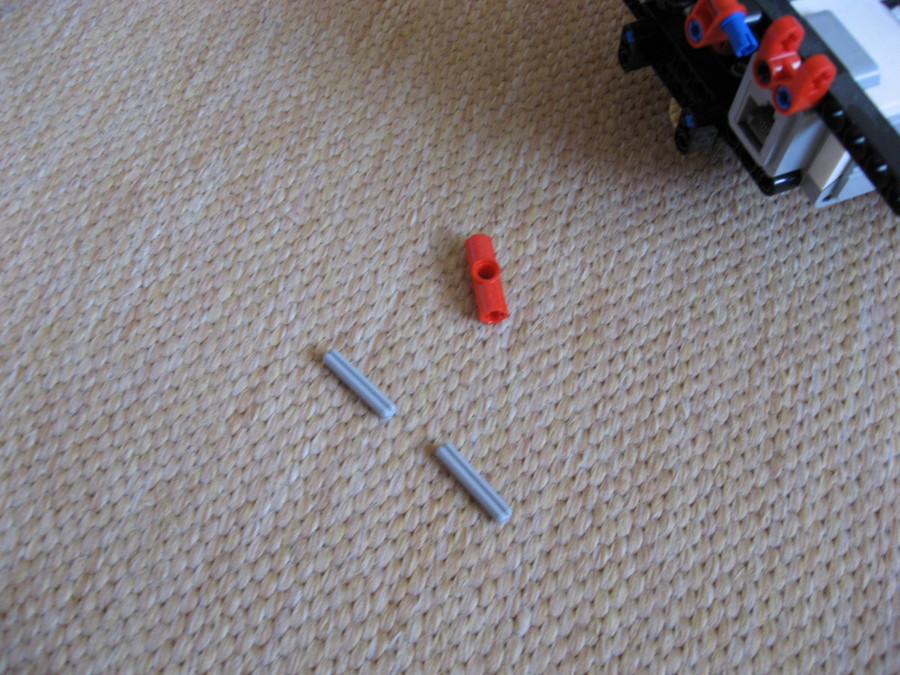
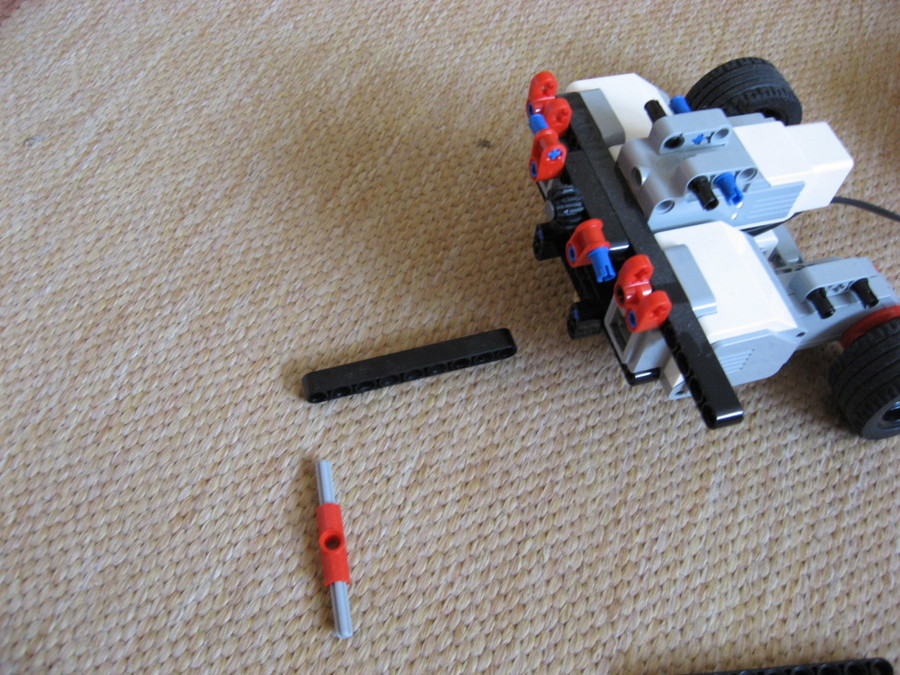
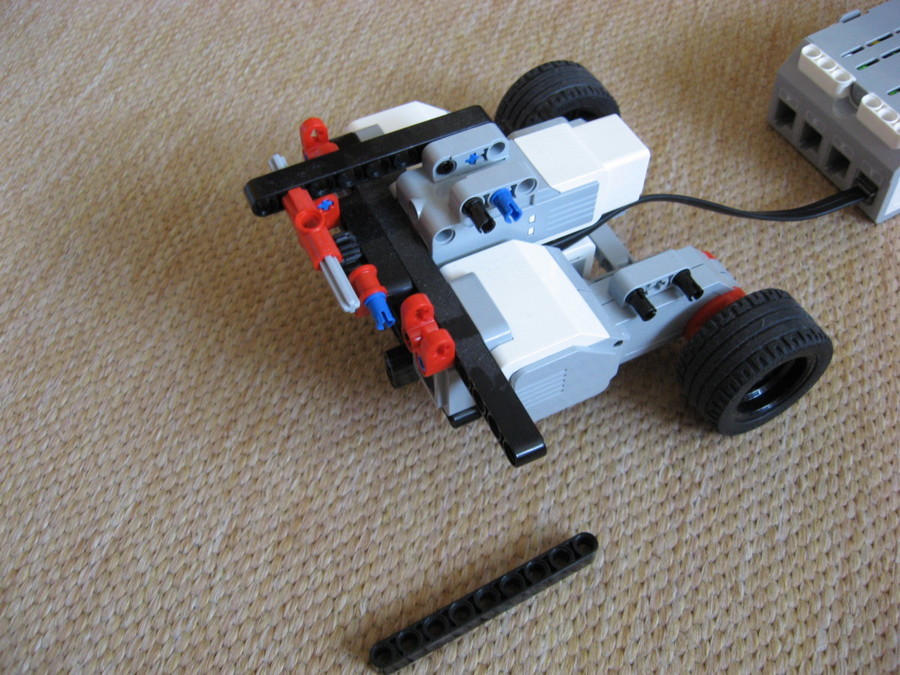
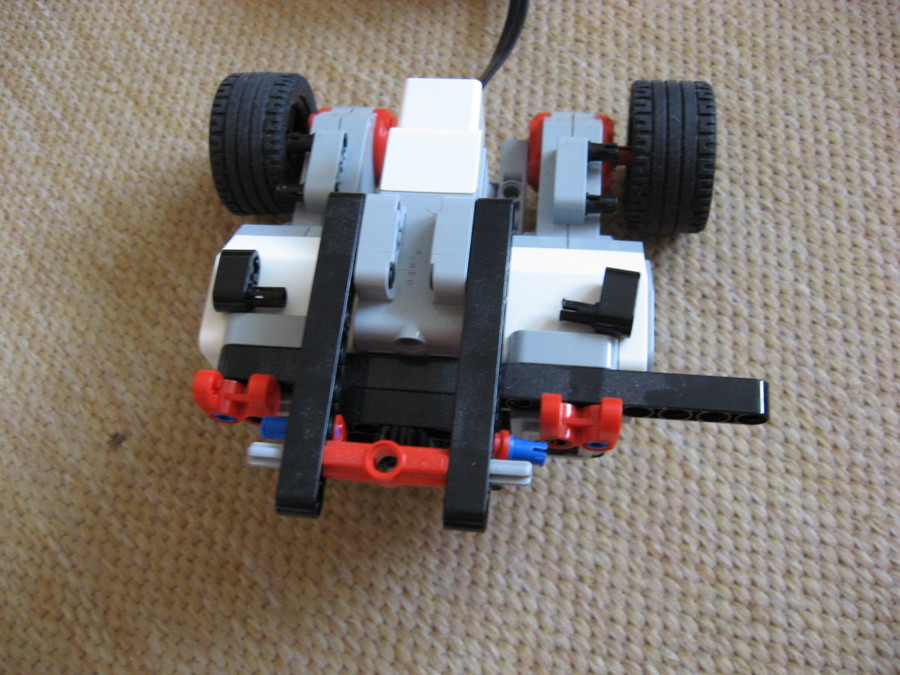
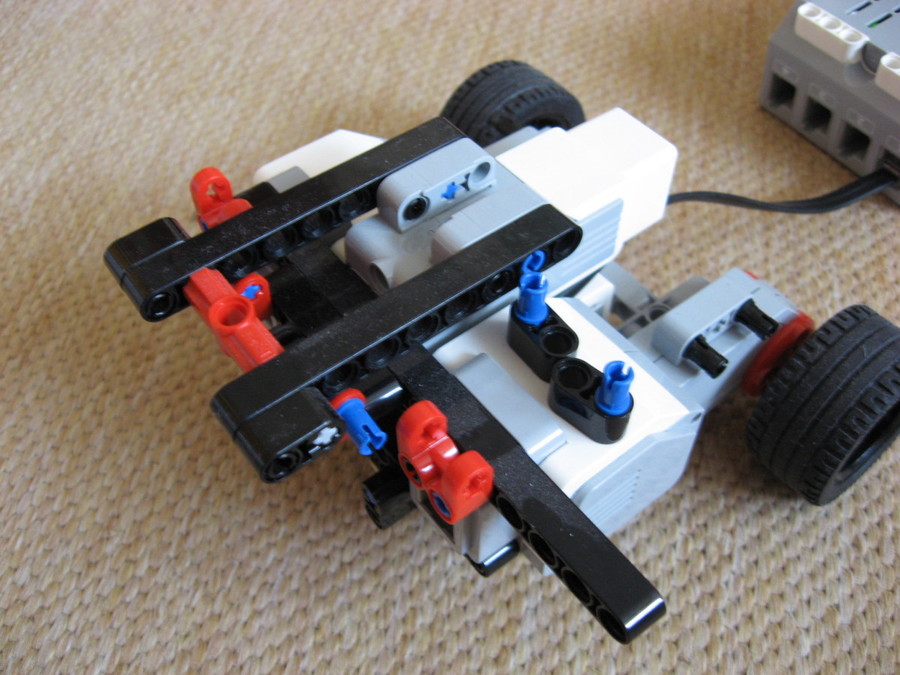
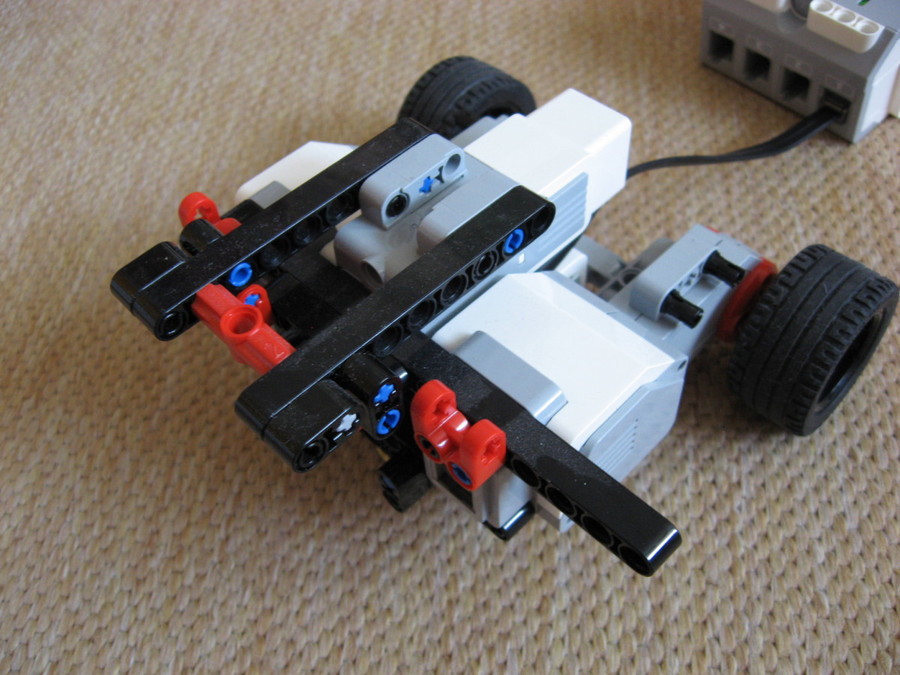
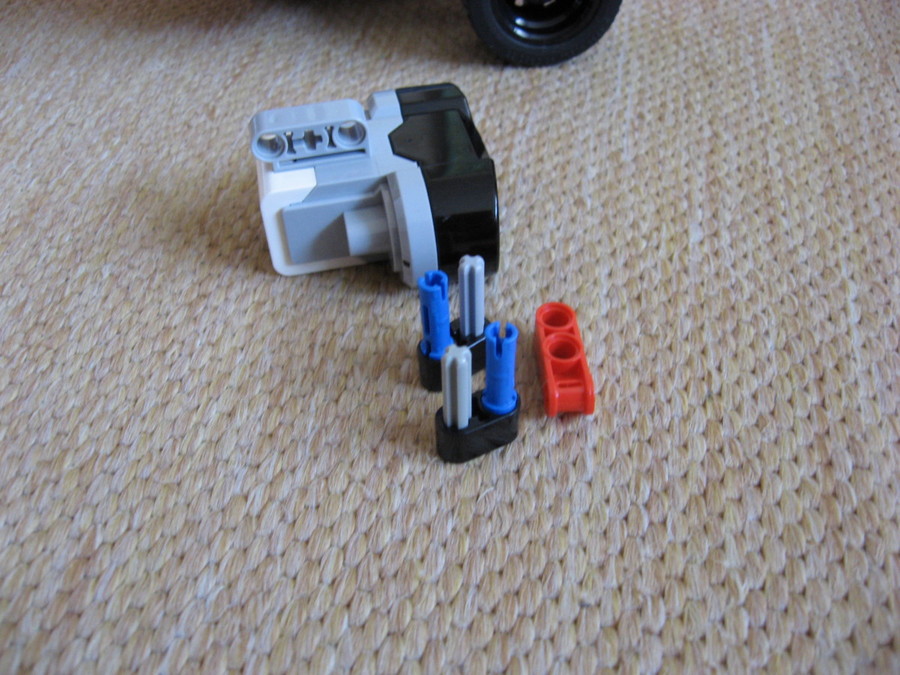
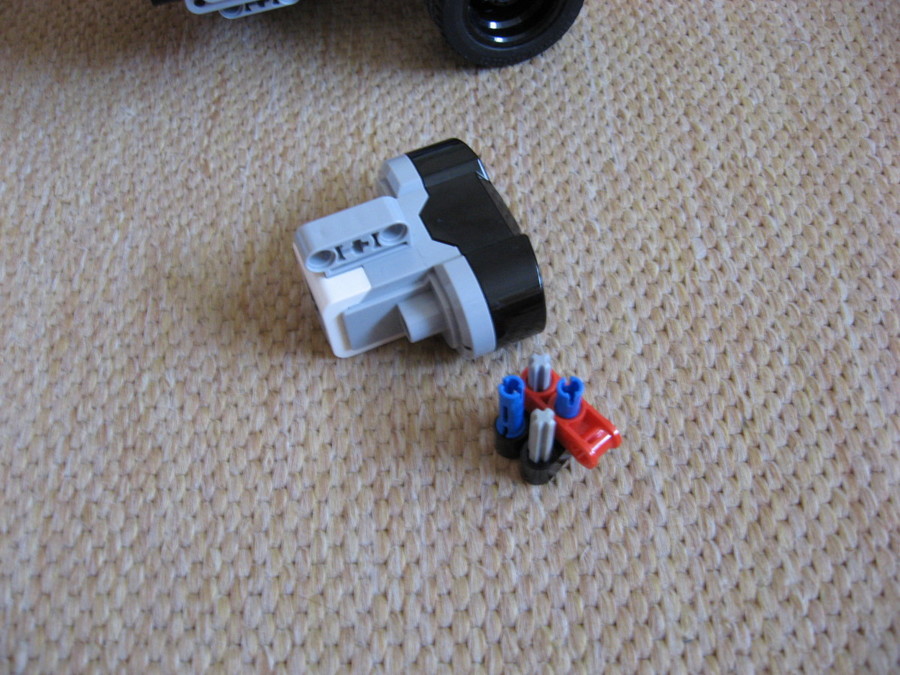
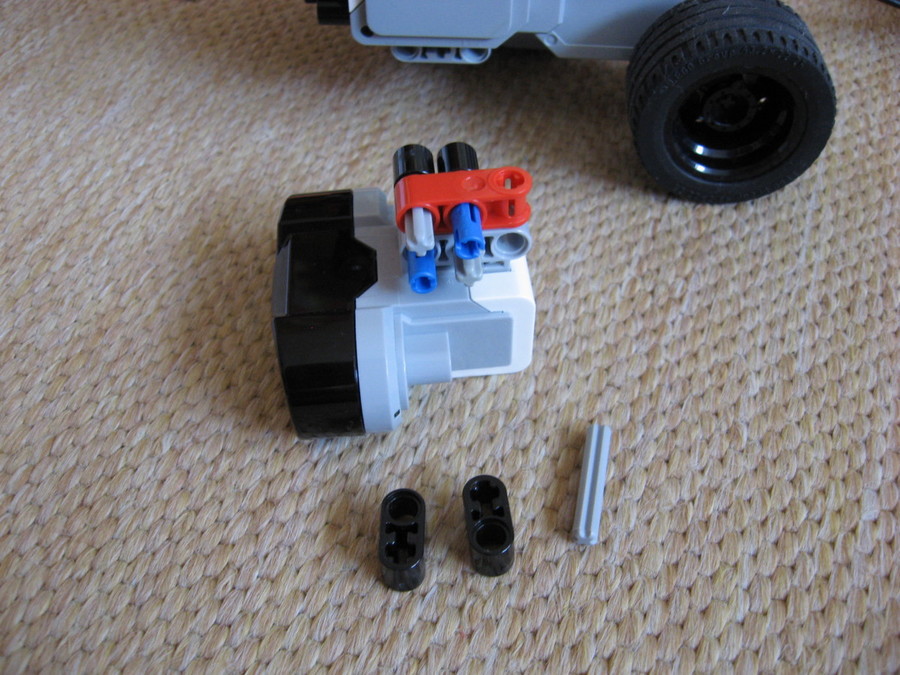
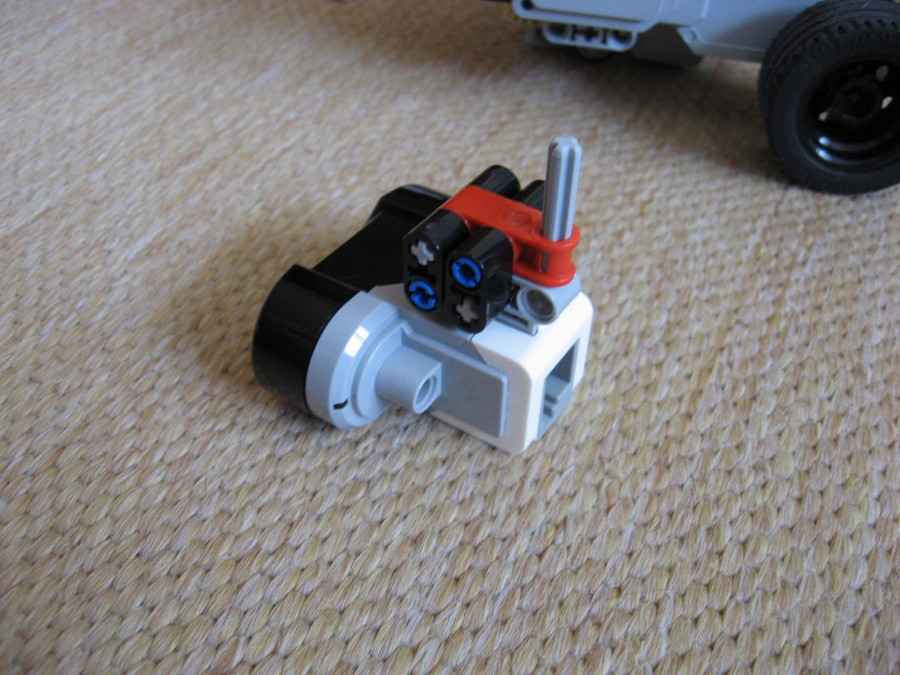
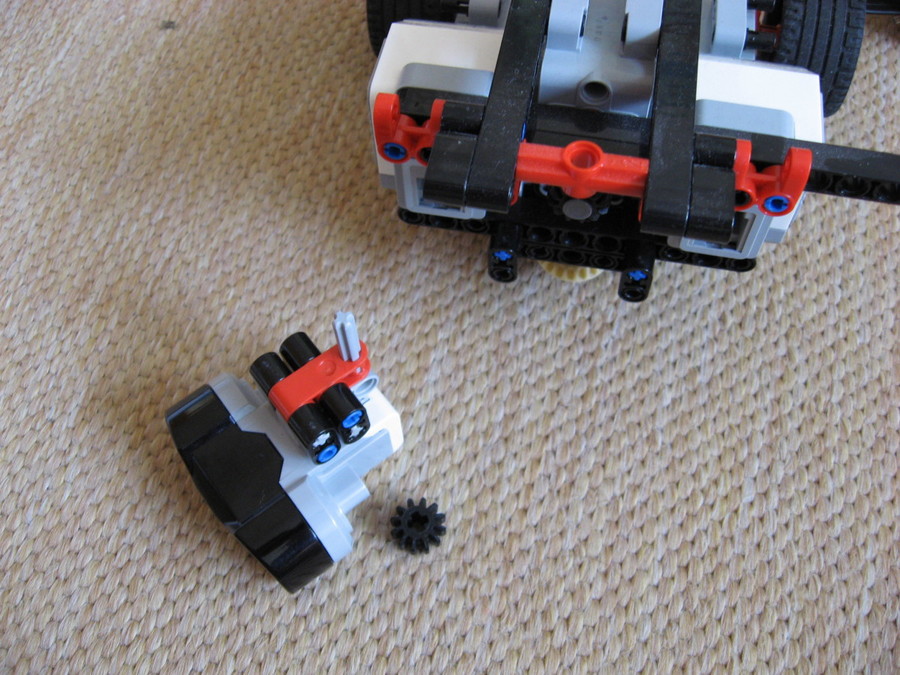
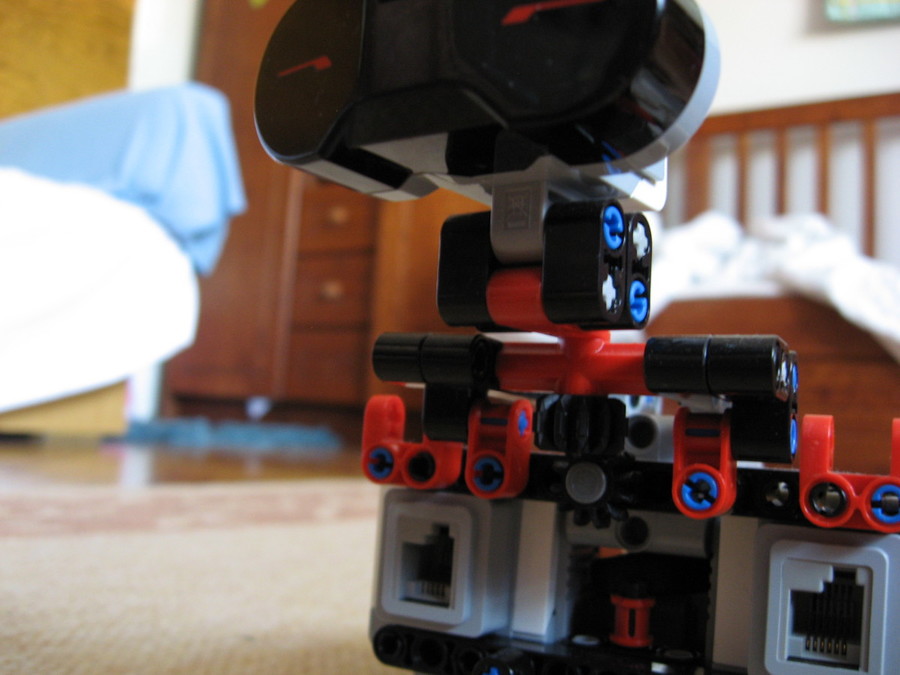
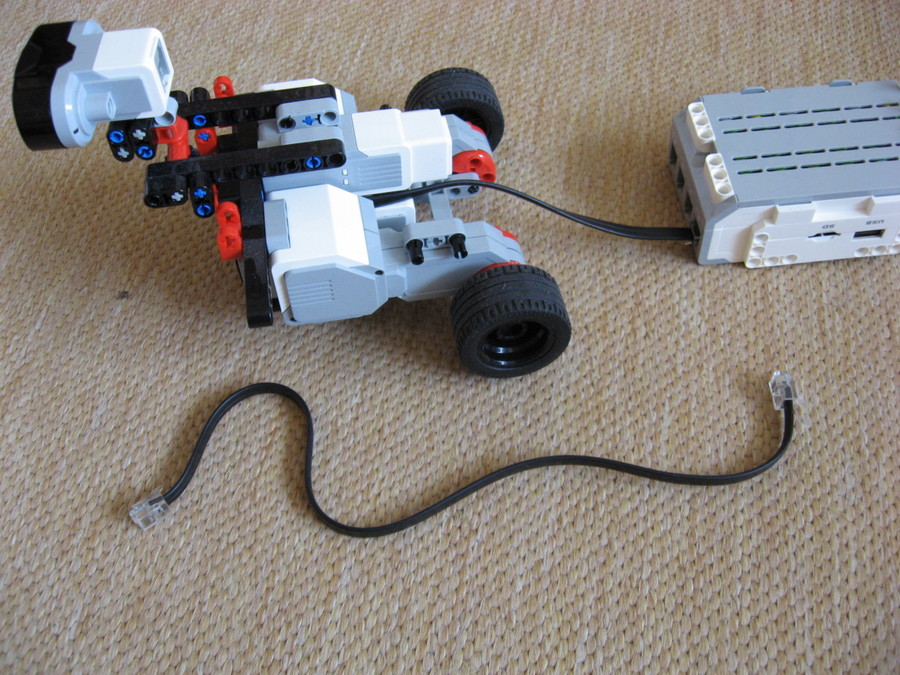
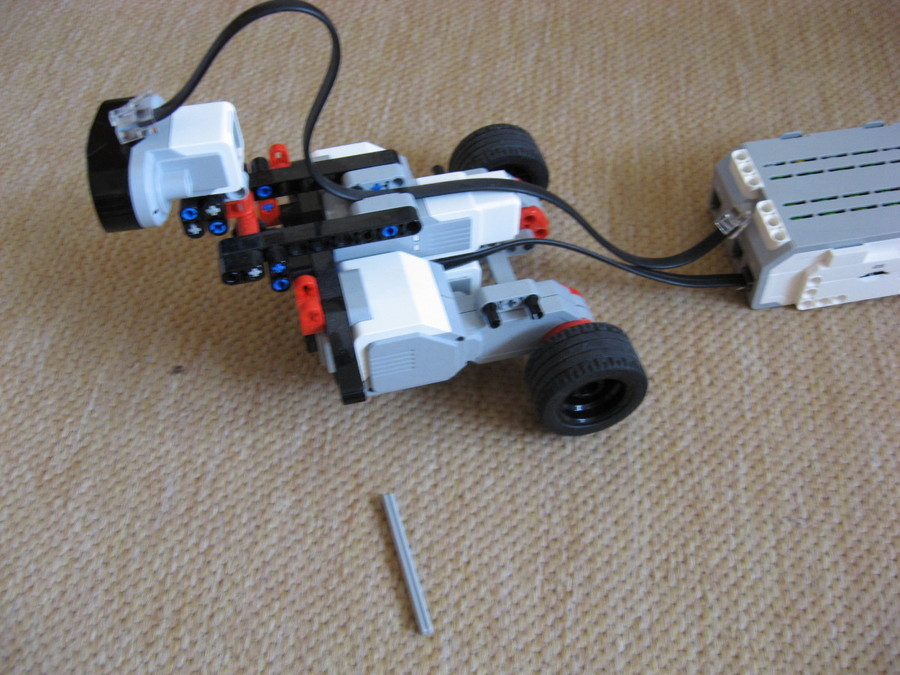
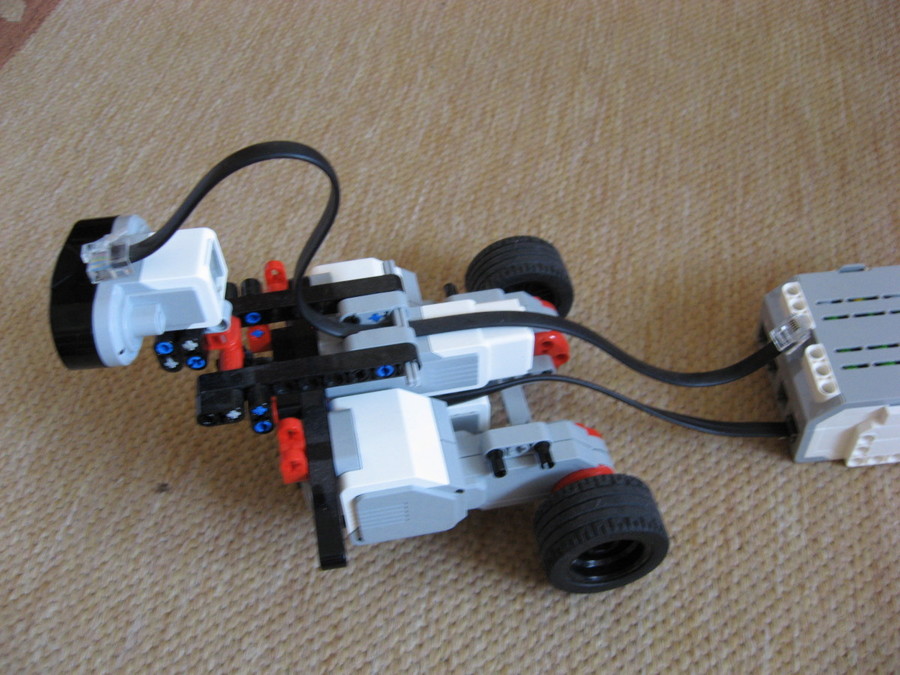
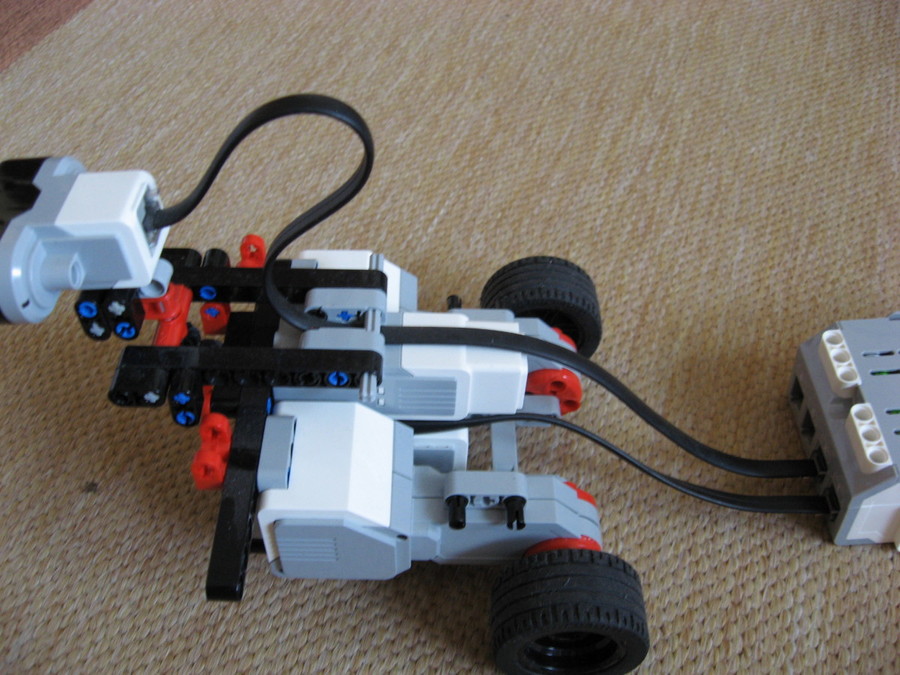
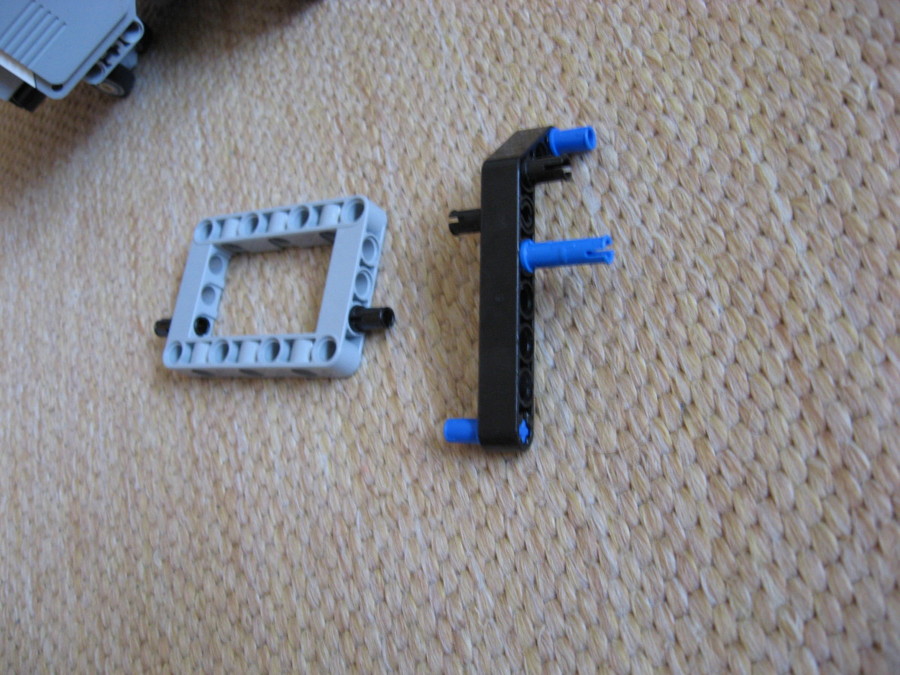
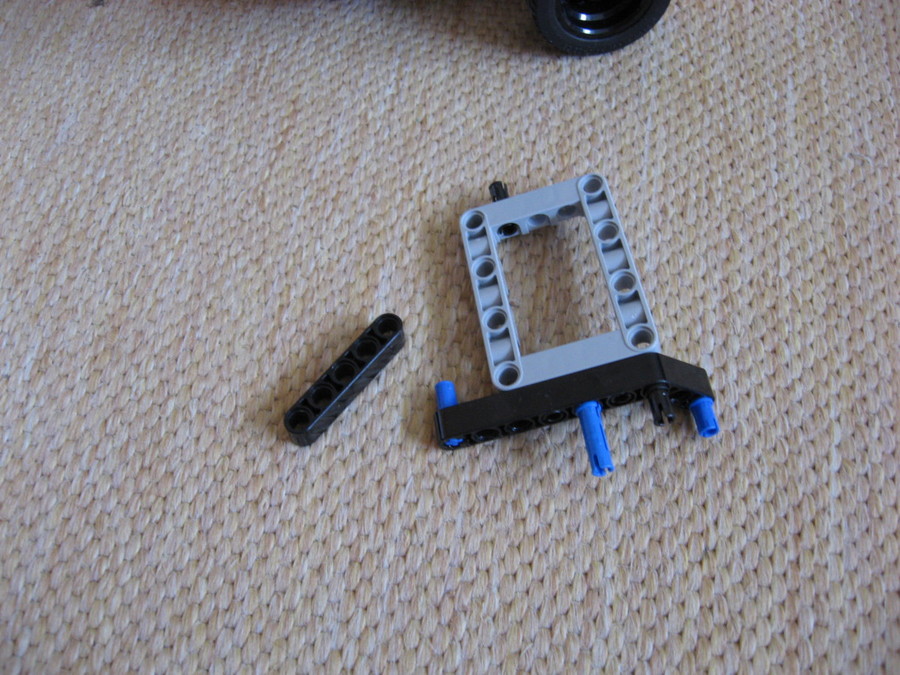
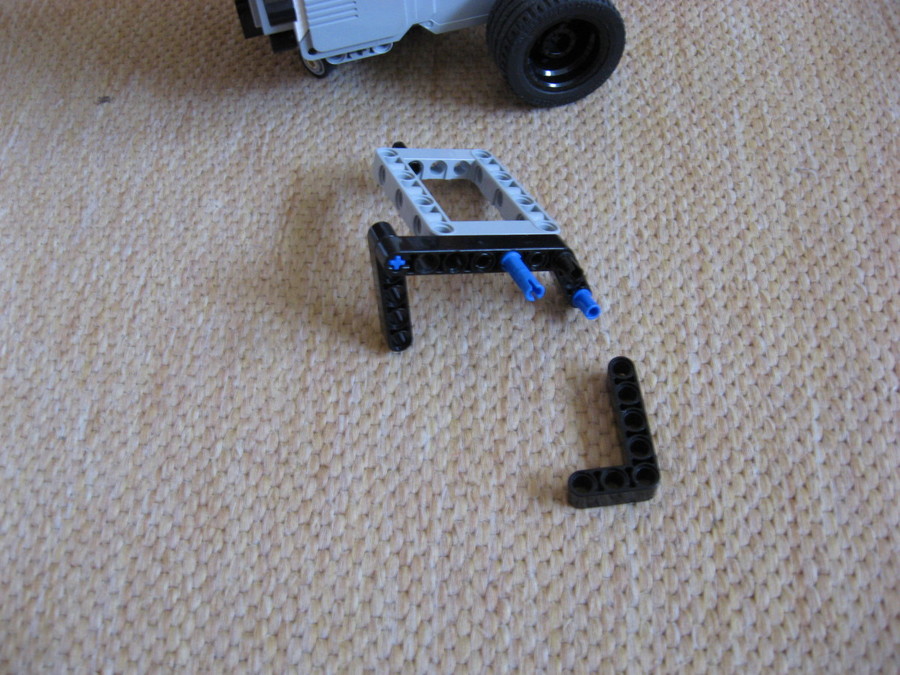
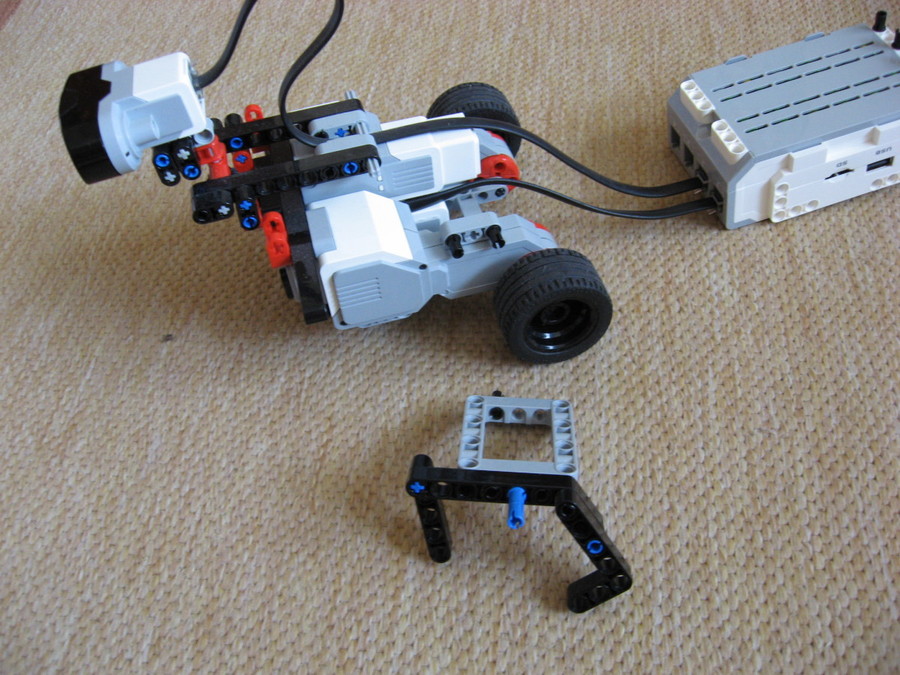
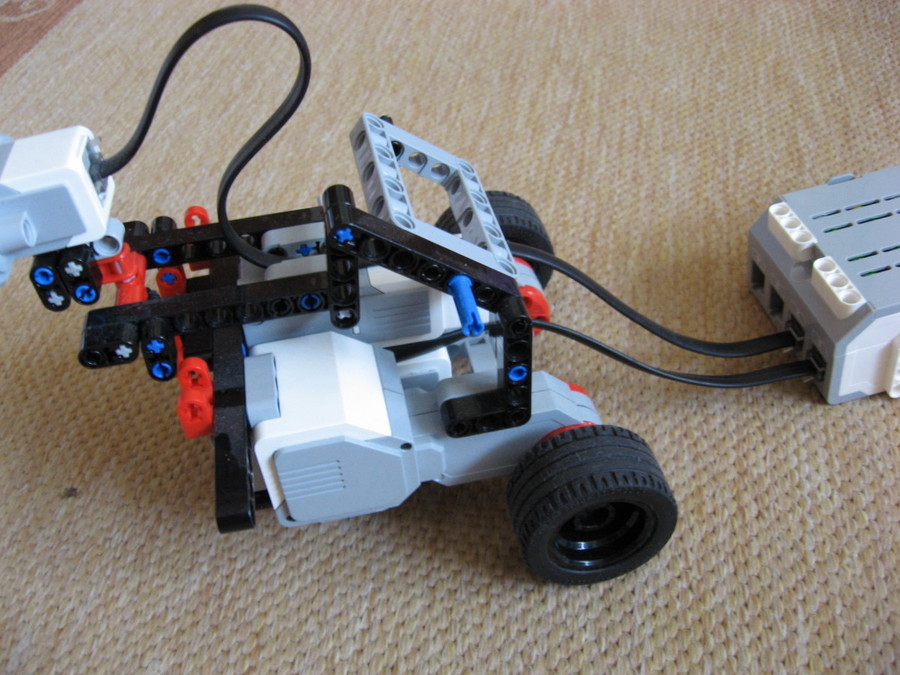
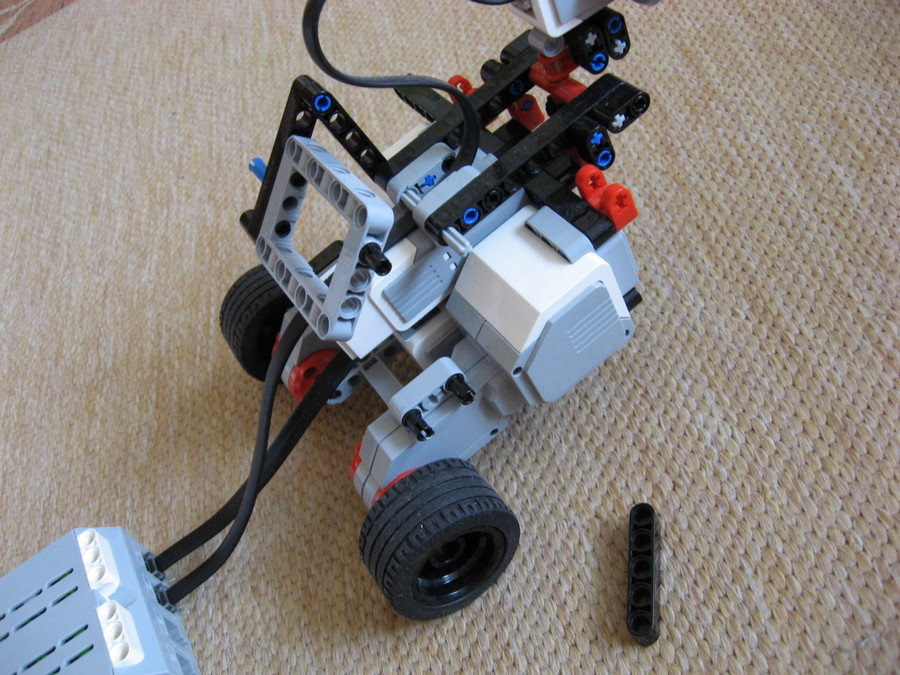
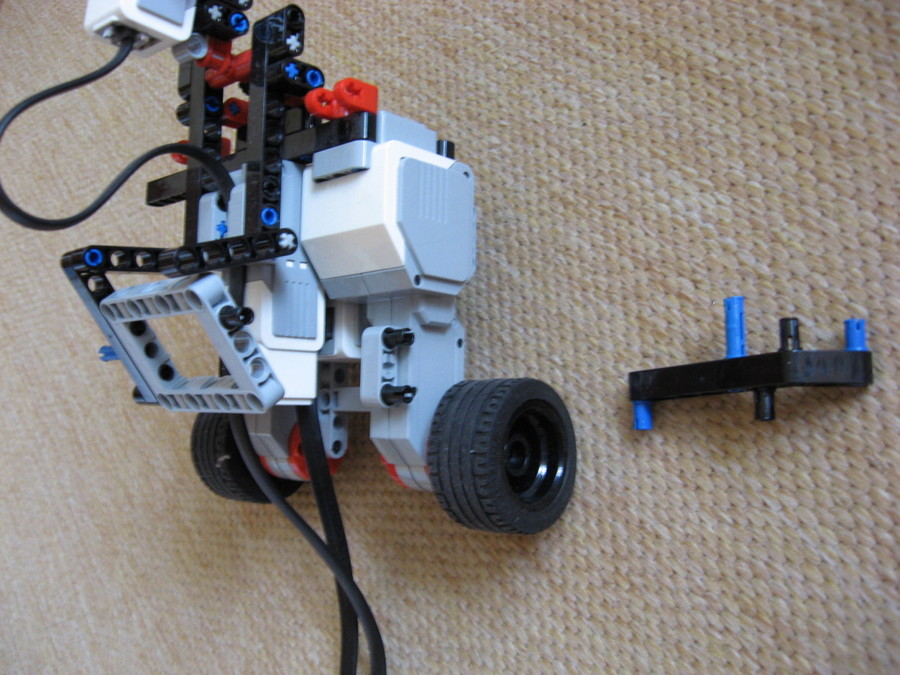
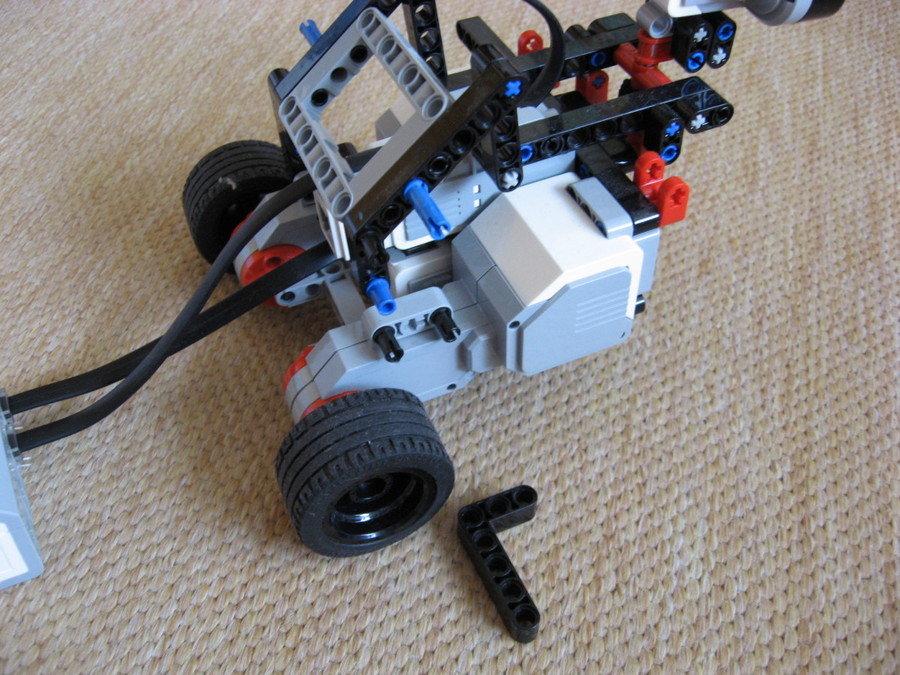
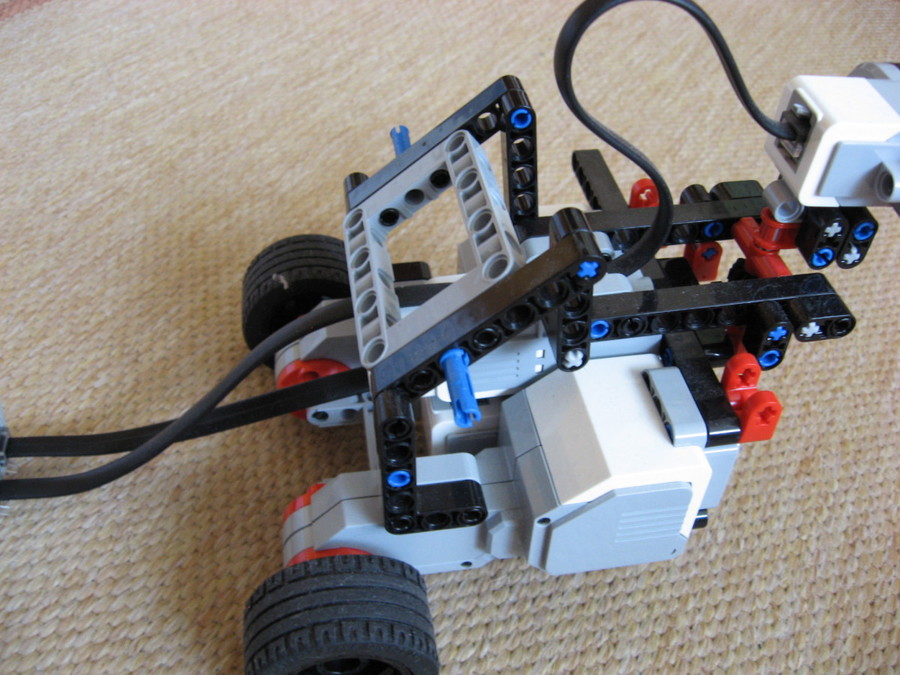
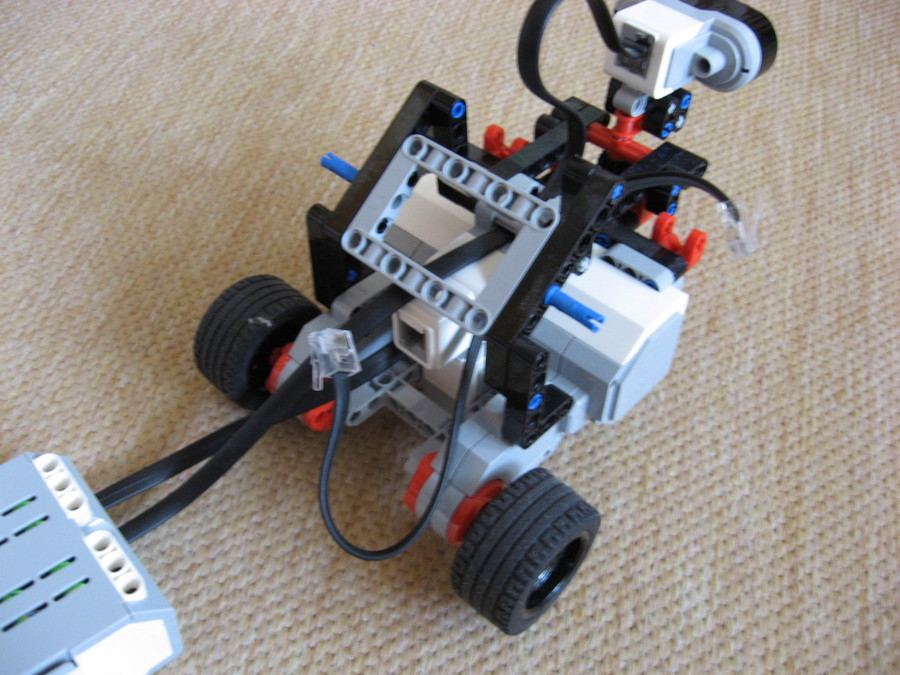
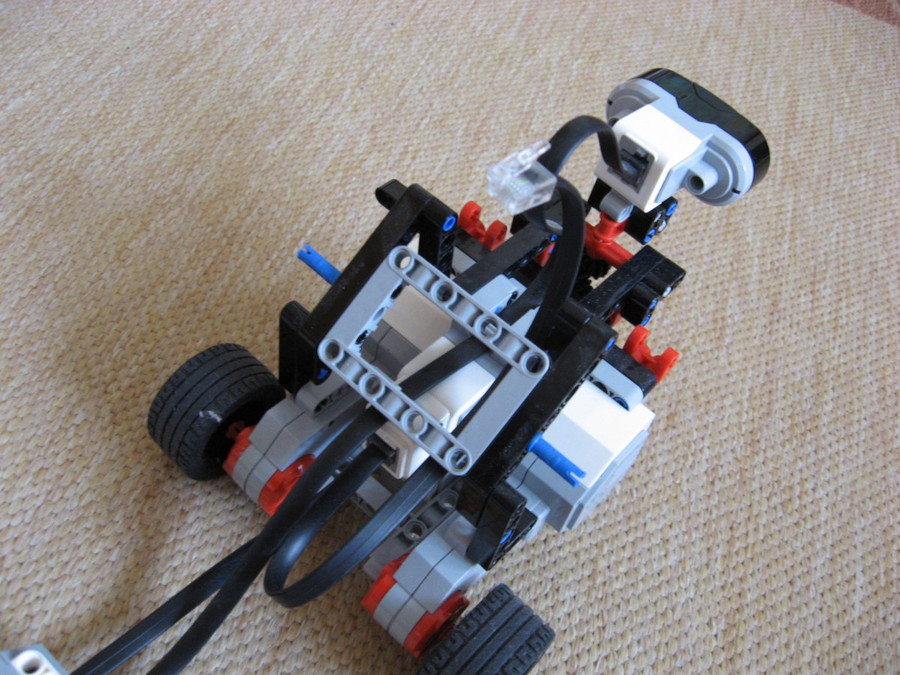
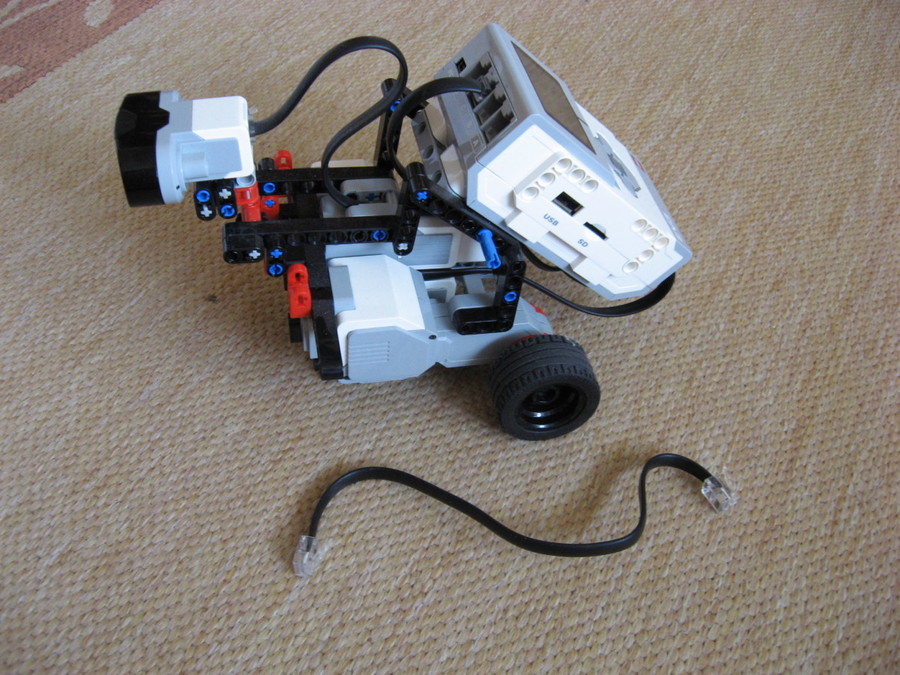
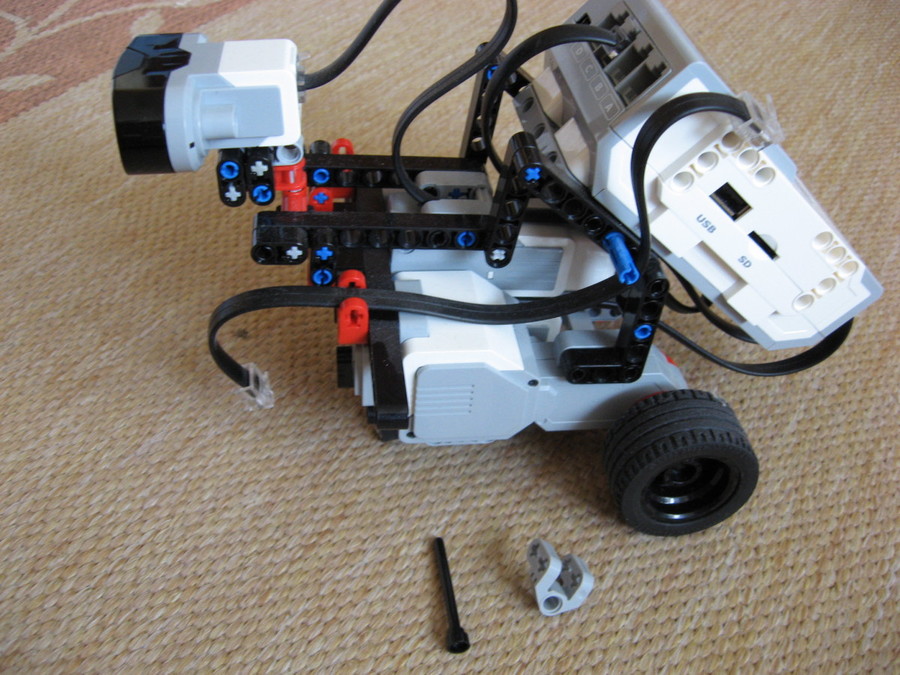
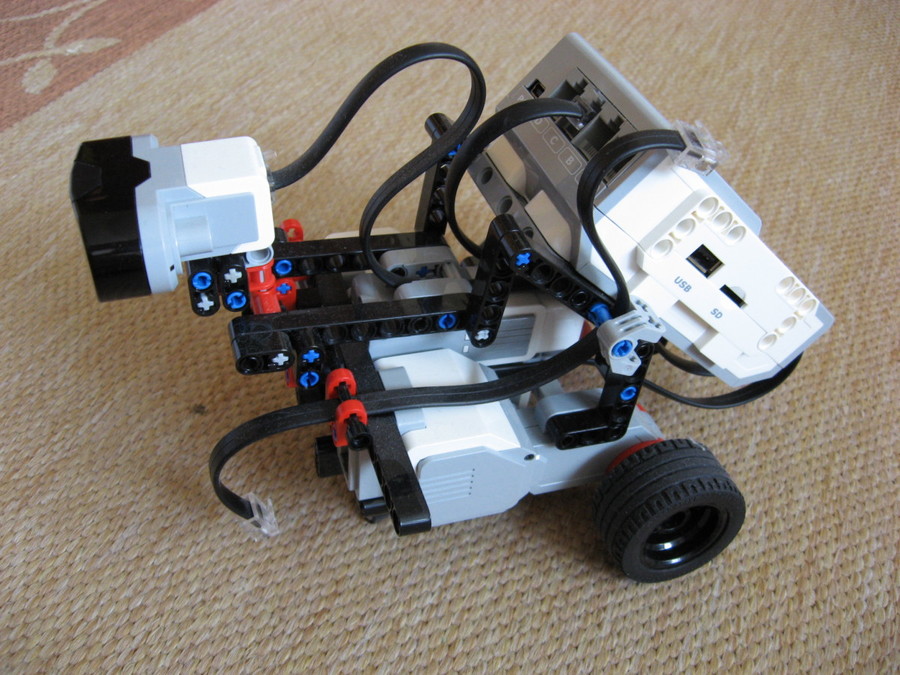
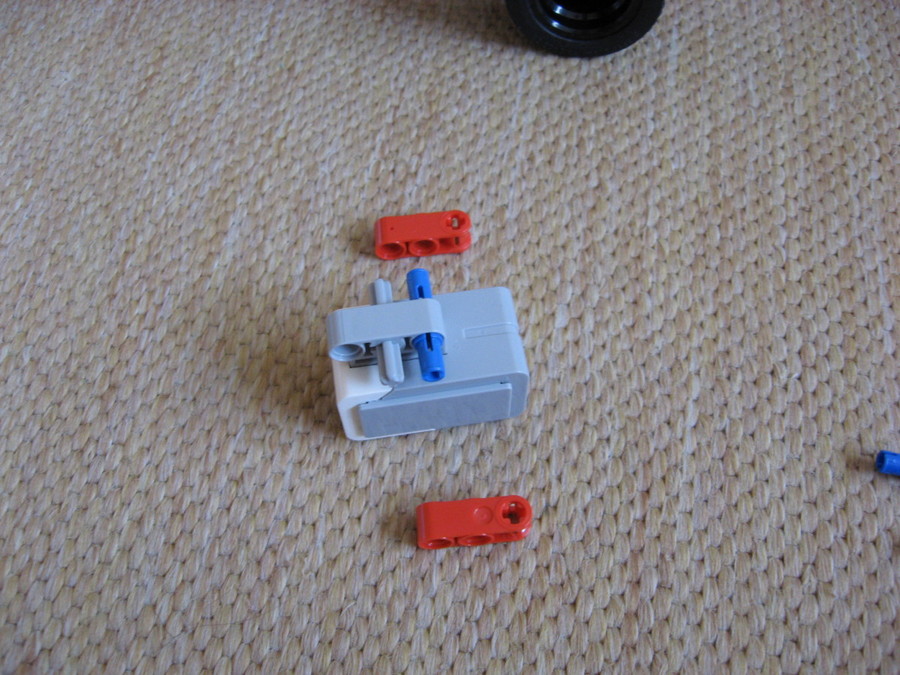
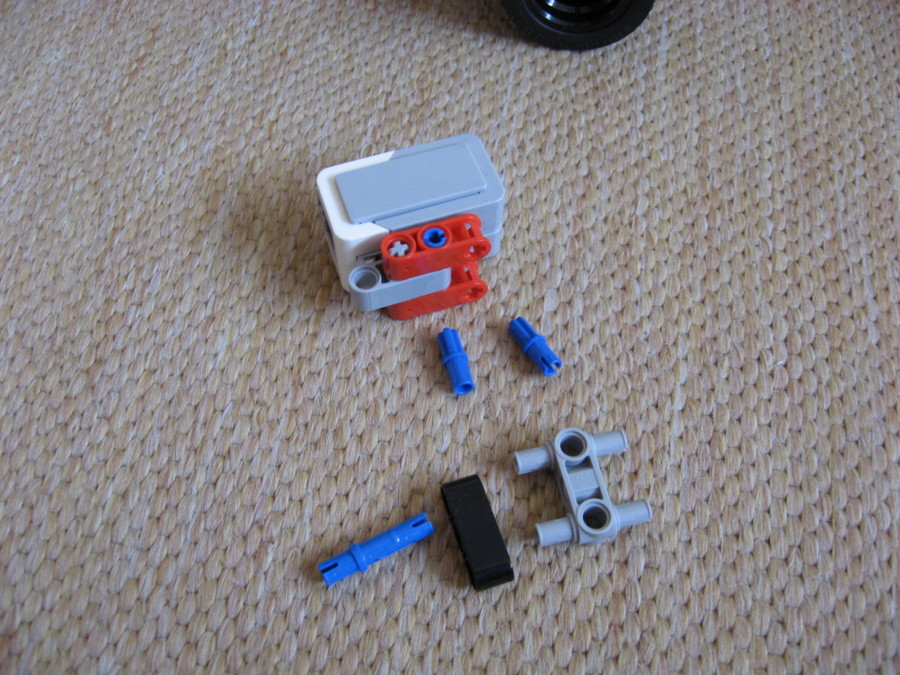
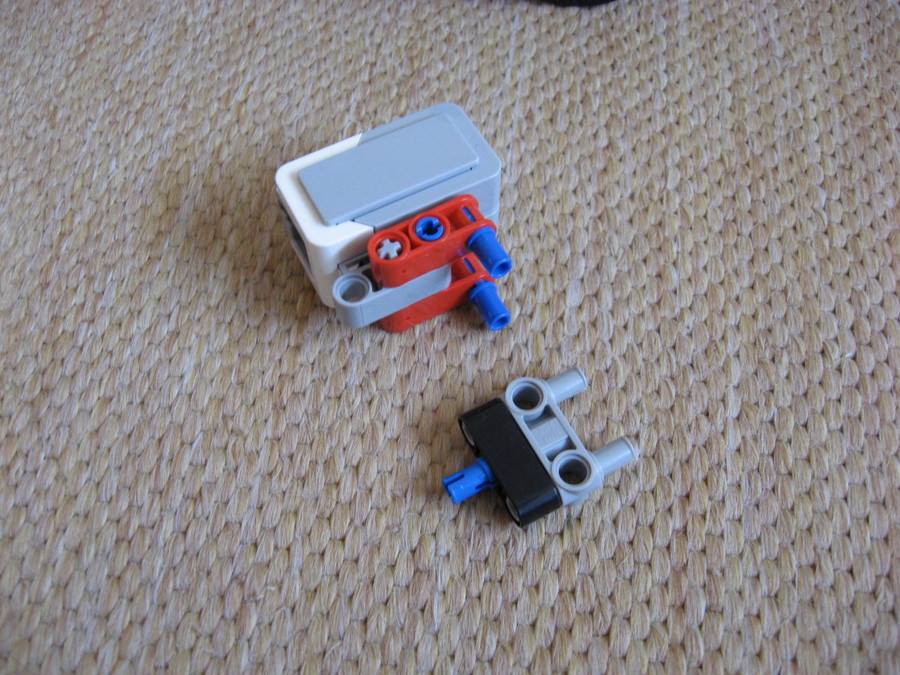
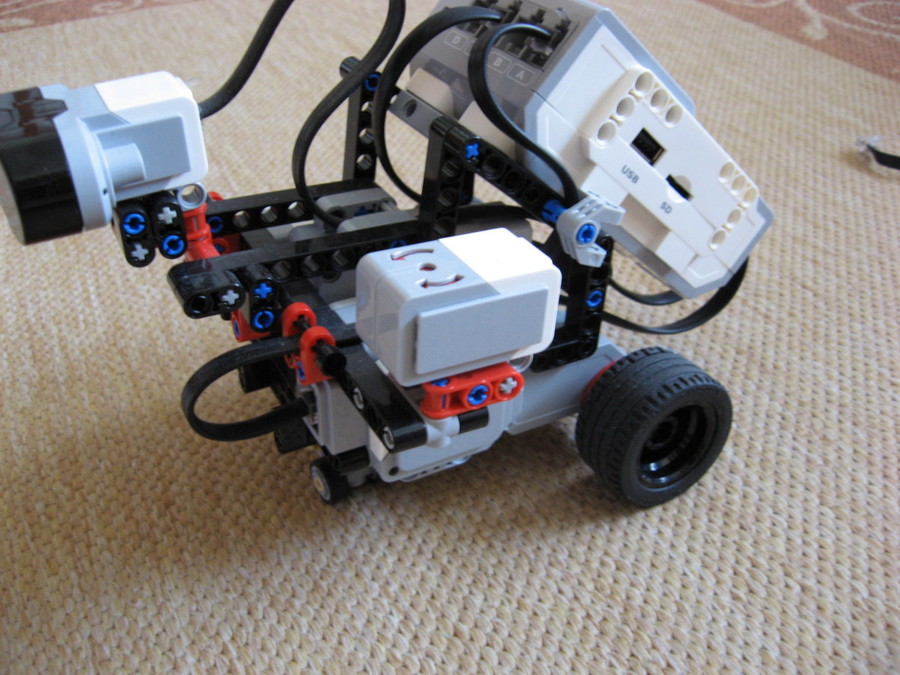
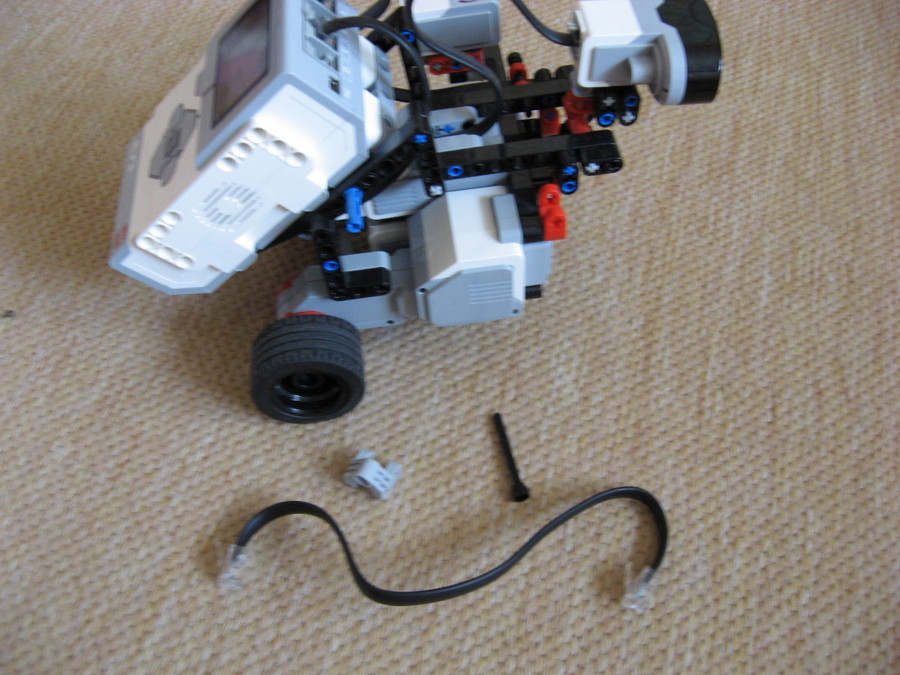
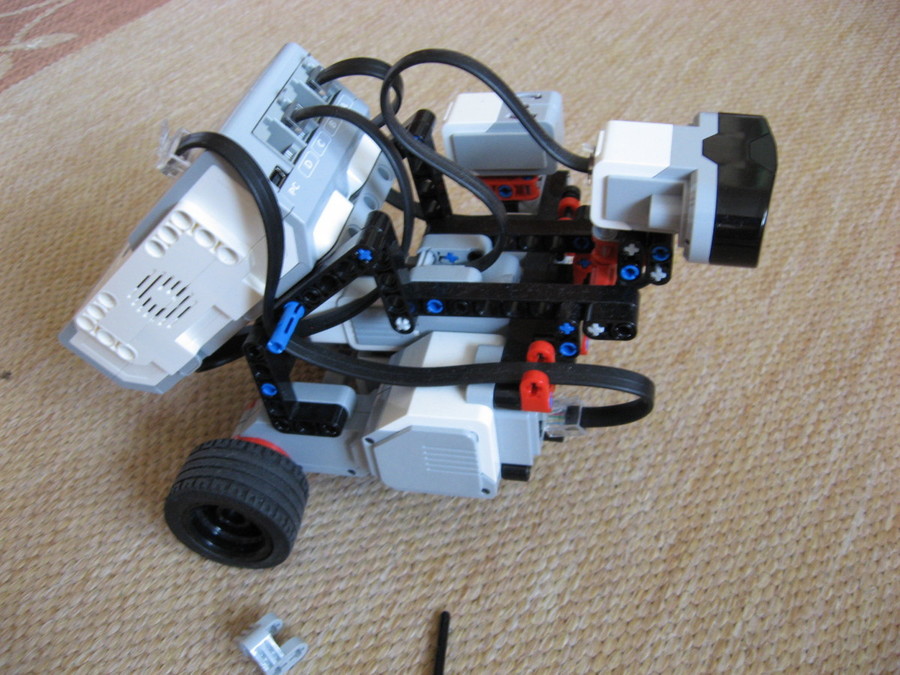
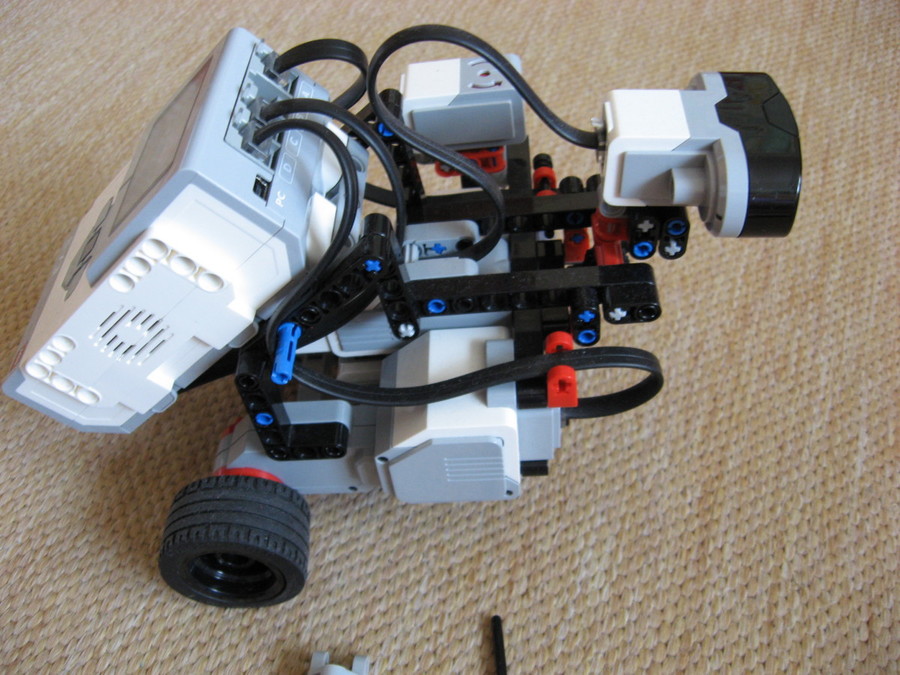
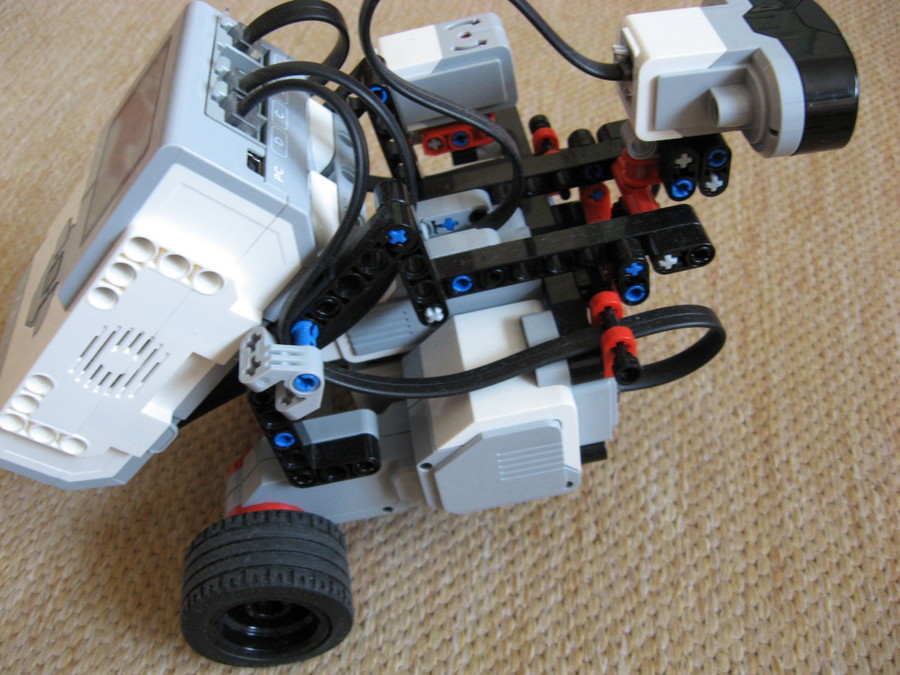
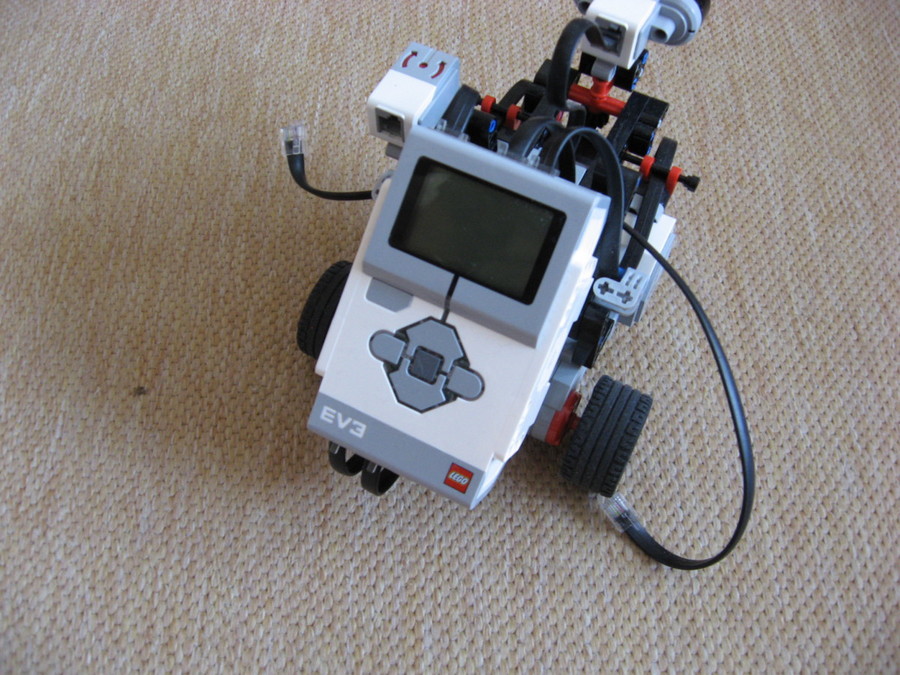
A képsorozaton végighaladva megépíthető a robot, amelynek működését korábban már ismertettem!
Köszönöm a figyelmet!
15-06-25









2015 június 25, 18:31
- 2016 LEGO Újdonságok
- 2017 LEGO® Újdonságok
- 2018 LEGO® Újdonságok
- 2019 LEGO® Újdonságok
- 2020 LEGO® Újdonságok
- 2021 LEGO® Újdonságok
- 2022 LEGO® Újdonságok
- 2023 LEGO® Újdonságok
- 2024 LEGO® Újdonságok
- 60. évfordulós készletek
- Angry Birds
- Animal Crossing™
- Architecture
- Art
- Atlantis
- Avatar
- Bionicle
- Brick Sketches™
- BrickHeadz
- Chima
- City
- Classic
- Creator 3-in-1
- Creator Expert
- DC
- Disney Princess™
- Disney™
- DOTS
- DREAMZzz™
- DUPLO®
- Elves
- Fortnite™
- Friends
- Gabby babaháza
- Ghostbusters™
- Gyűrűk Ura
- Harry Potter™
- Hidden Side
- ICONS
- Ideas - CUUSOO
- Indiana Jones
- Juniors
- Jurassic World
- Kaland - LEGO Movie
- Karib tenger kalózai
- Kastély, LEGO Vár (Kingdoms)
- Large Models
- Lone Ranger
- Marvel
- MINDSTORMS®
- Minecraft™
- Minions®
- Mixels
- Monkie Kid™
- Monster Fighters
- NEXO KNIGHTS™
- NINJAGO®
- Overwatch®
- Pirates
- Polybag - Mini készletek
- Power Functions
- Powered Up
- Scooby-Doo
- Sérült doboz
- Sonic the Hedgehog™
- Speed Champions
- Star Wars™
- Star Wars™ gyűjtői készletek
- Stranger Things
- Super Mario
- Technic
- The Legend of Zelda™
- THE LEGO® BATMAN MOVIE™
- Trollok®
- Ultimate Collector Series
- Ultra Agents
- Unikitty™
- VIDIYO™
- Wednesday
- Wicked
- Xtra
- További készletek
Értesülj elsőként a vásárláshoz járó ajándékokról, újdonságokról!

Elfogadom az adatvédelmi szabályzatot
JöhetTörlöm