RCX Targonca
Az interneten elérhető néhány építési leírás egyedi RCX építményekhez, közöttük van egy targonca is, amely csak egyenesen tud menni és 2 fényszenzorral, automatikusan mozgat egy raklapot:
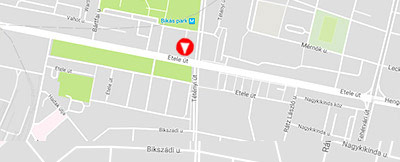
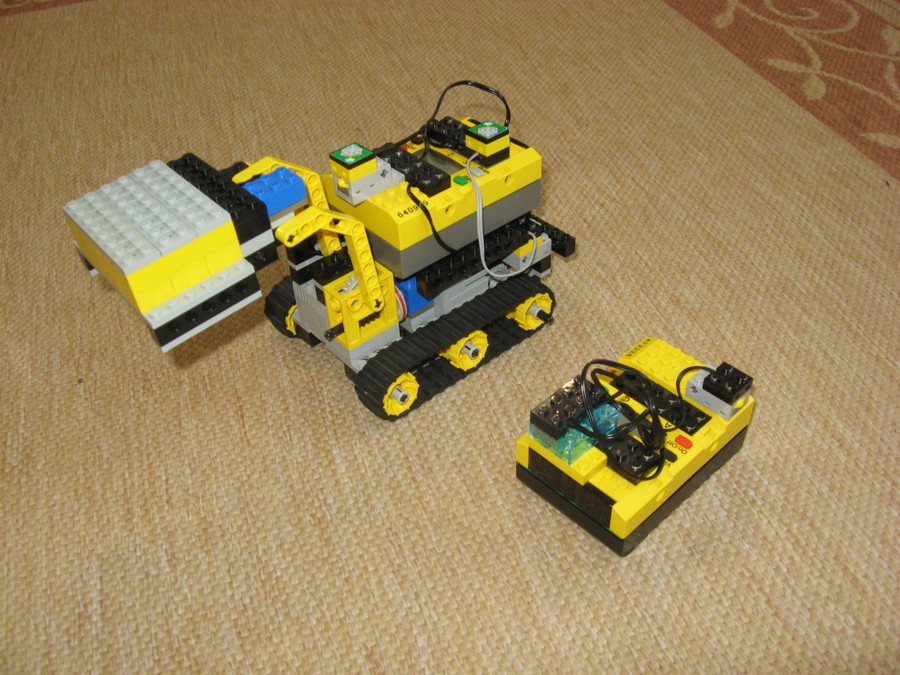
Megdupláztam a hajtóművét, hernyótalpat tettem rá, hogy a fordulás működjön, és átalakítottam egy második RCX Brick segítségével távirányíthatóvá, kapott egy ütközés érzékelős hátsó lökhárítót, maradt fényszenzoros a raklap érzékelés, a targonca villa mozgástartományát pedig forgásszenzor vezérli:
Igazából teljesen átalakult a szerkezet, a két motor egymás mellett van és csigakerék hajtással mozgatja a meghajtó tengelyeket. Nem túl gyors a jármű, de ez igazából az irányíthatóságot megkönnyíti:

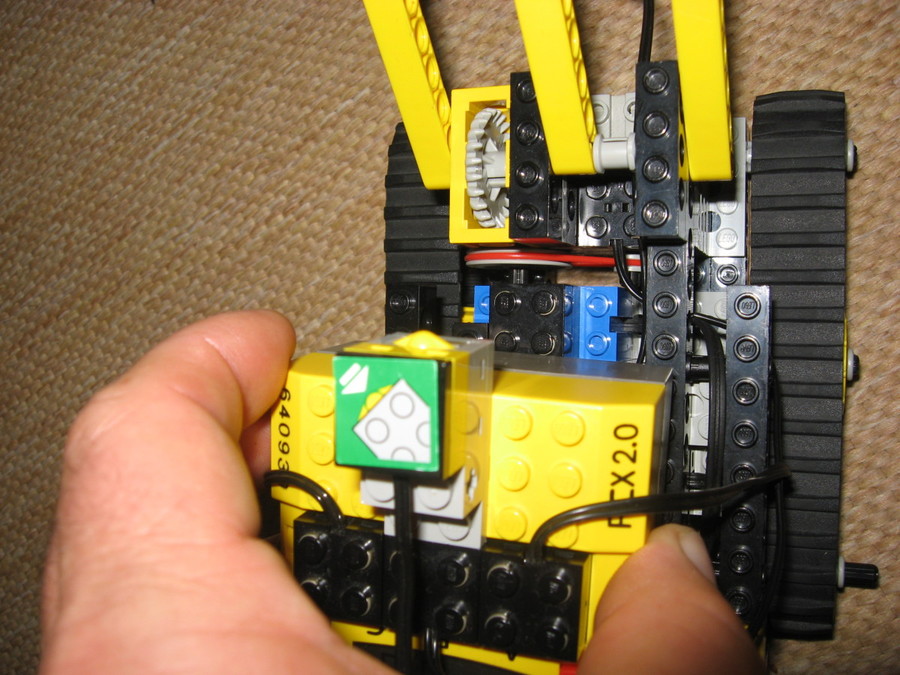
A meghajtáshoz tartozik a hátsó ütközőhöz rendelt két érintés érzékelő, ha nekitolat a jármű egy akadálynak, akkor megáll és már csak előre távirányítható:
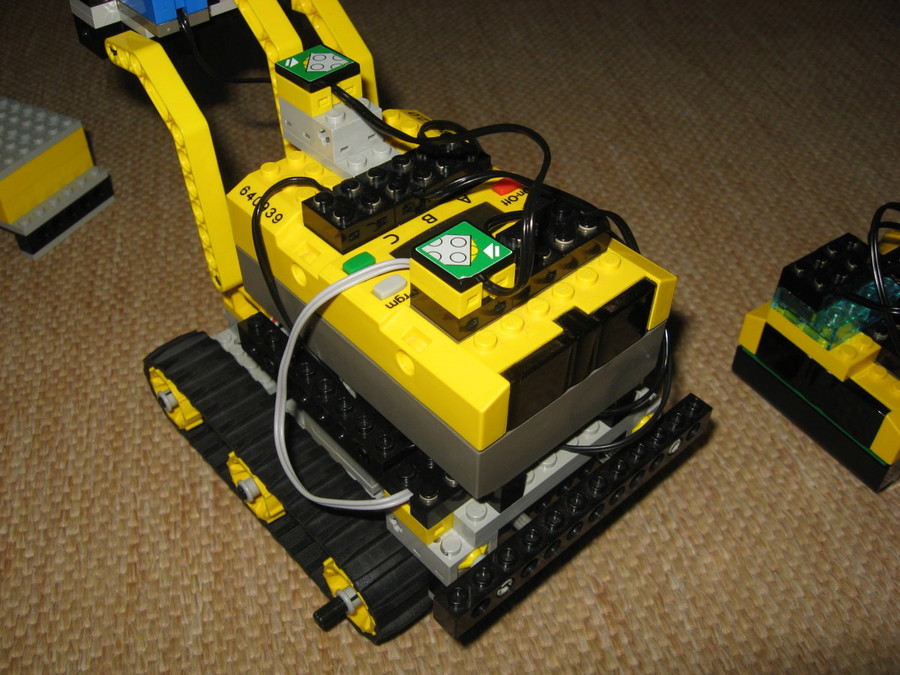
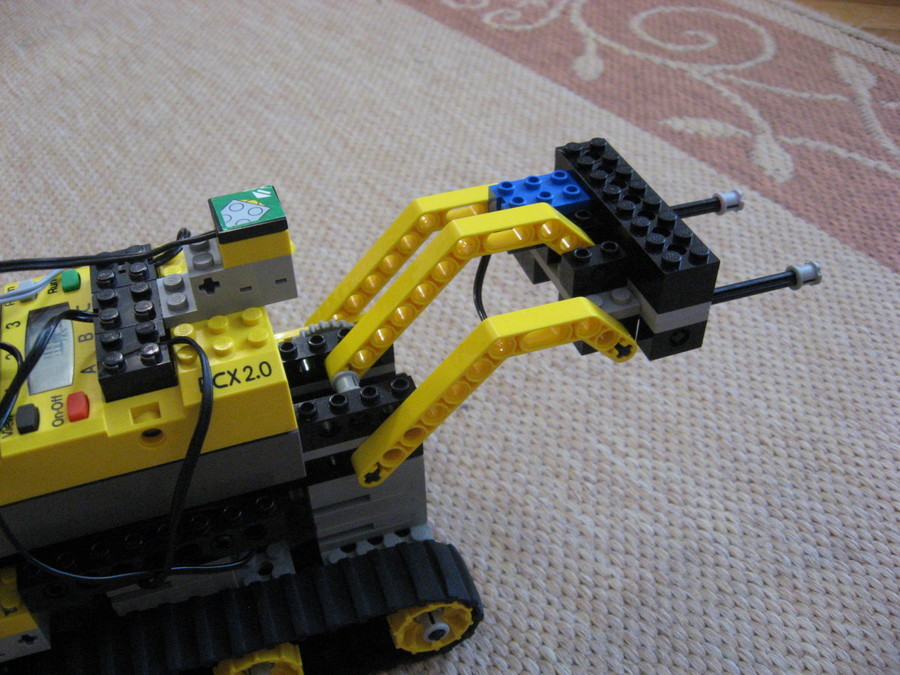
Az emelővillát szintén csigakerék áttétellel hajtja meg egy motor, de ezt megelőzi egy gumiszíjas lassítás is, így elérhető egy optimális mozgási sebesség és a motor a hajtóművel is jól összekapcsolható:
Látható, hogy a csigakerék tengelyén van egy fordulatszám érzékelő, fent pedig egy érintés érzékelő, amely bekapcsolás után a "reset" funkciónál kap csak szerepet. A villák vízszintes pozícióját egy 3 pontos felfüggesztési mechanizmus garantálja.

A videón látszik, hogy bekapcsoláskor elvégez egy pozíció felismerést, majd alsó helyzetbe áll, utána már én emeltem felső pozícióba, itt már a kar nem éri el az érintés érzékelőt.
A villába én is beépítettem a fényérzékelőt, ezáltal ha a raklapra rájárunk, a szerkezet felismeri azt és magasba emeli, na persze a szemben sütő napfényt is simán felemeli :-) de tudjuk, hogy LEGO robotozni nem napfény mellett kell!
Rövid fejszámolás után kiderül, hogy több szenzor van a gépben, mint szenzor port, egyszerűen párhuzamosítottam az érintés érzékelőket, így a 3 db egy porton van. Ez nem gond, mert bekapcsolást követően a villa resetelés fut, ekkor nem halad a gép, amikor pedig távirányítjuk, akkor már a villa nem éri el az érintés érzékelőjét, így különféle működési szakaszokban a szenzorok működése nem zavarja egymást.
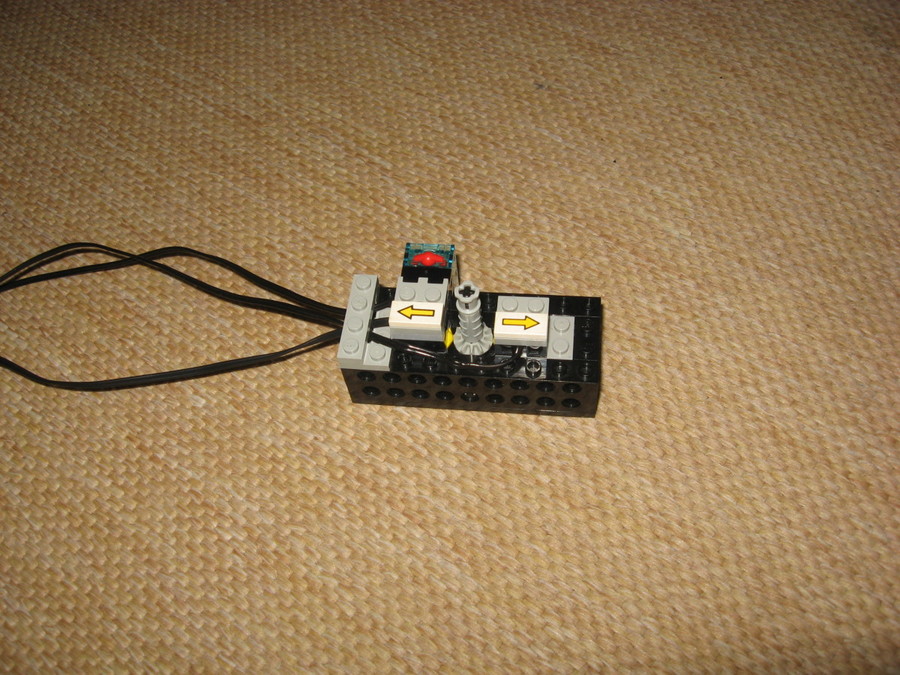
A távirányító egy RCX tégla 3 db Touch szenzorral, van egy funkció választó (szürke házzal) és két irányító (trans-clear kék piros gombokkal):
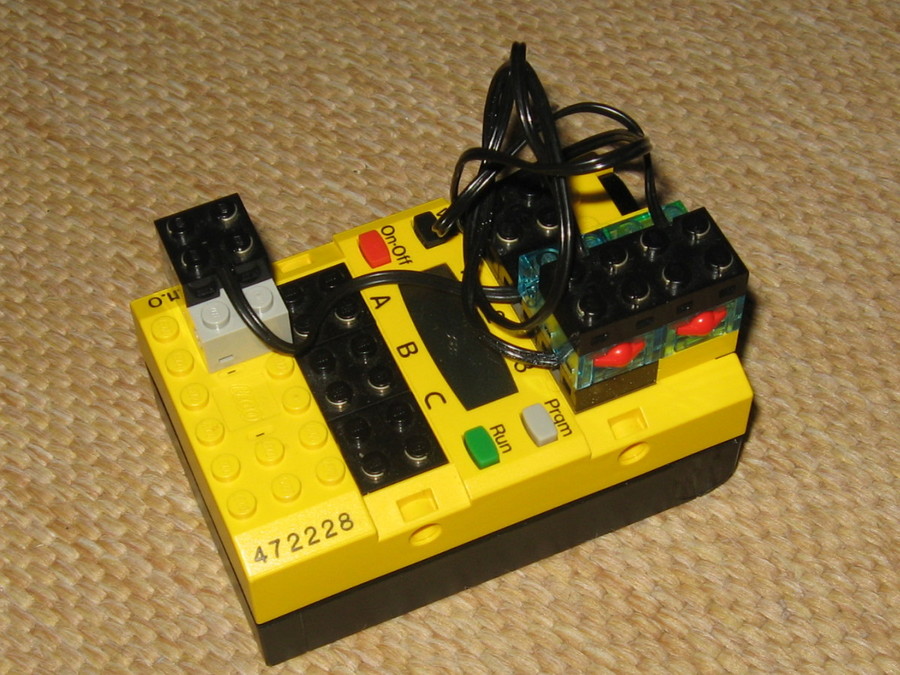
a Kocka kimeneteit itt nem használtam, igaz tehettem volna 3 Light&Sound lámpát is, de én inkább a kijelzőn íratom ki, hogy melyik állásban van a funkcióváltó - a járművön és az irányítón egyaránt megjelenik a funkcióra utaló szám - a számok értelmezése:
- 1.0: villa mozgatás fel-le
- 2.0: irányítás előre-hátra
- 3.0: helyben fordulás jobbra-balra

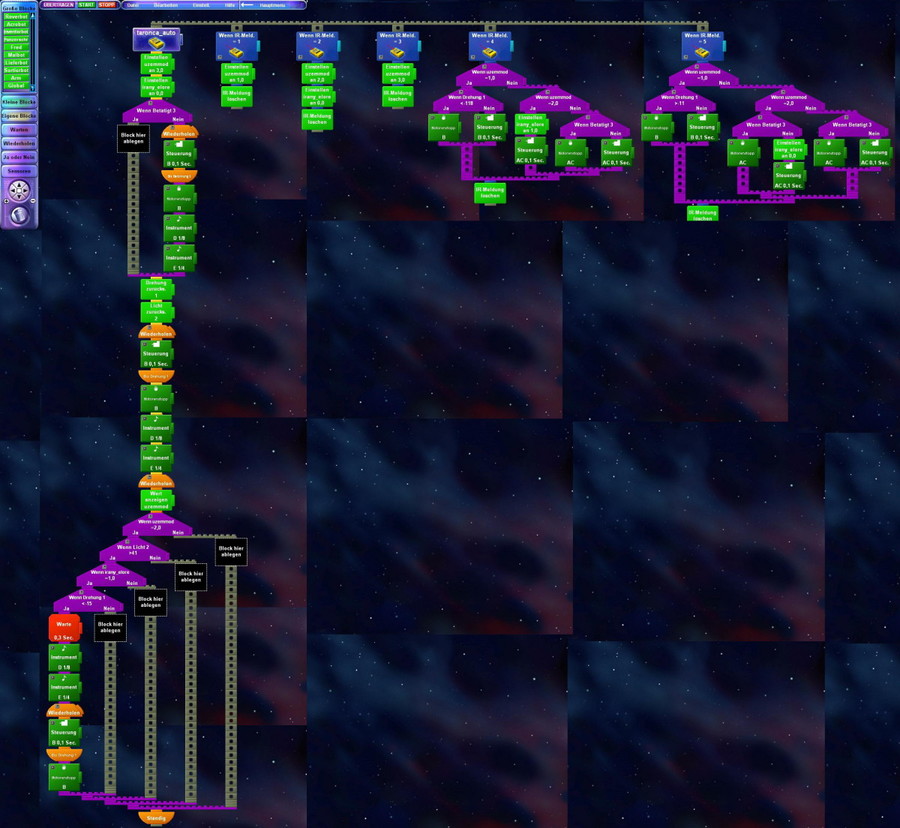
A távirányító program kódja:

A jármű program kódja:
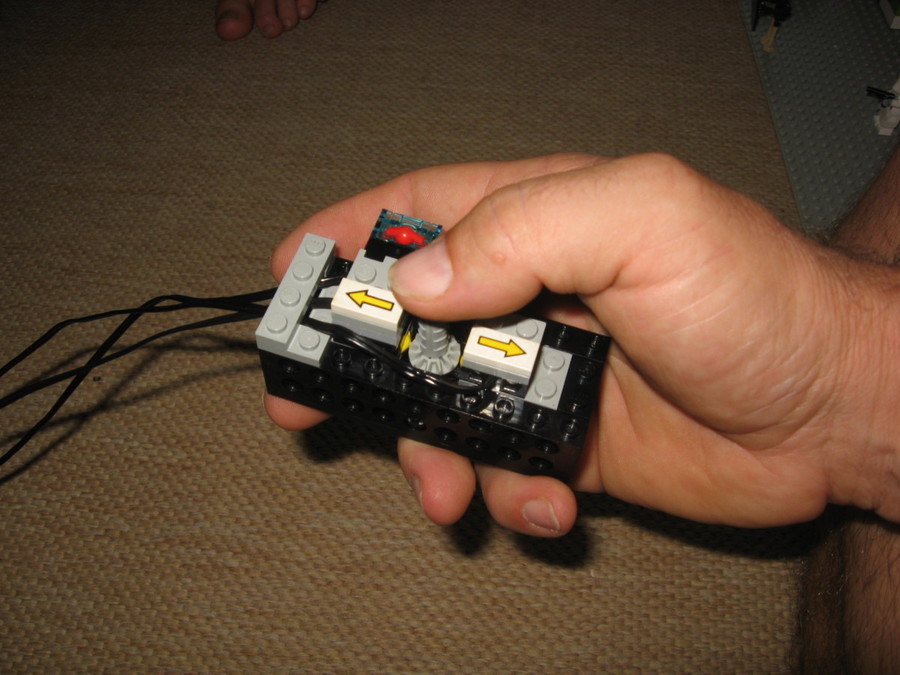
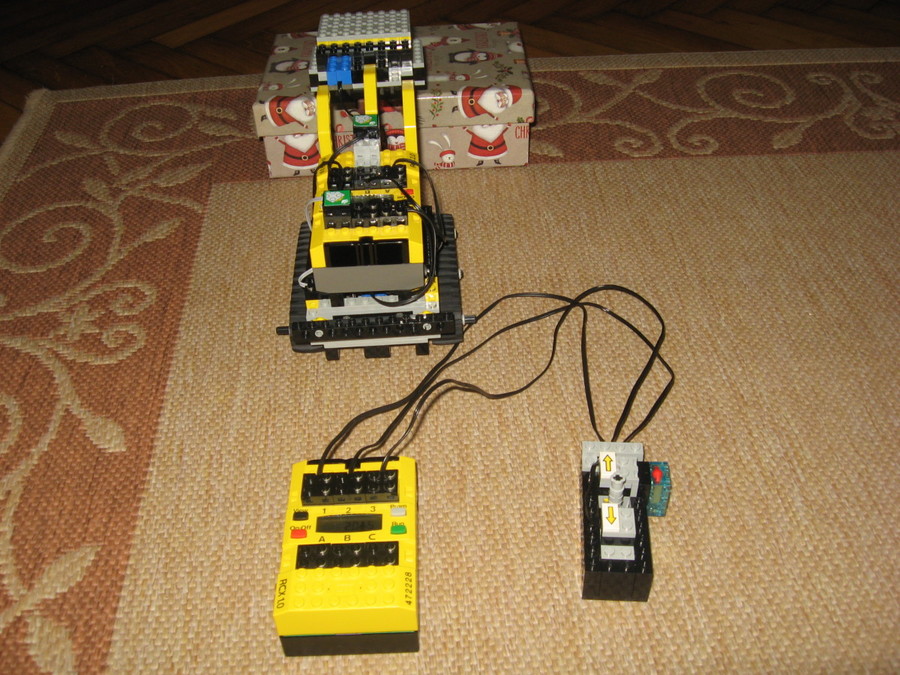
Kiderült, hogy a távirányító nem igazán ergonómikus, készítettem hozzá egy egszerű karos módosítást, amelyet jobb kézben tartva minden funkció kényelmesen kezelhető, miközben másik kezünkben az RCX kocka van, közöttük vezetékek:

A szerkezet egyszerű és megbízható, egy kis kúp fogaskerék nyomja be a megfelelő érintés szenzort, azok rugóereje vissza is téríti a kart, ha elengedjük:

A végleges szerkezet működése:
Köszönöm, hogy elolvastad!
2016-09-10
2016 szeptember 10, 16:01
- 2016 LEGO Újdonságok
- 2017 LEGO® Újdonságok
- 2018 LEGO® Újdonságok
- 2019 LEGO® Újdonságok
- 2020 LEGO® Újdonságok
- 2021 LEGO® Újdonságok
- 2022 LEGO® Újdonságok
- 2023 LEGO® Újdonságok
- 2024 LEGO® Újdonságok
- 60. évfordulós készletek
- Angry Birds
- Animal Crossing™
- Architecture
- Art
- Atlantis
- Avatar
- Bionicle
- Brick Sketches™
- BrickHeadz
- Chima
- City
- Classic
- Creator 3-in-1
- Creator Expert
- DC
- Disney Princess™
- Disney™
- DOTS
- DREAMZzz™
- DUPLO®
- Elves
- Fortnite™
- Friends
- Gabby babaháza
- Ghostbusters™
- Gyűrűk Ura
- Harry Potter™
- Hidden Side
- ICONS
- Ideas - CUUSOO
- Indiana Jones
- Juniors
- Jurassic World
- Kaland - LEGO Movie
- Karib tenger kalózai
- Kastély, LEGO Vár (Kingdoms)
- Large Models
- Lone Ranger
- Marvel
- MINDSTORMS®
- Minecraft™
- Minions®
- Mixels
- Monkie Kid™
- Monster Fighters
- NEXO KNIGHTS™
- NINJAGO®
- Overwatch®
- Pirates
- Polybag - Mini készletek
- Power Functions
- Powered Up
- Scooby-Doo
- Sérült doboz
- Sonic the Hedgehog™
- Speed Champions
- Star Wars™
- Star Wars™ gyűjtői készletek
- Stranger Things
- Super Mario
- Technic
- The Legend of Zelda™
- THE LEGO® BATMAN MOVIE™
- Trollok®
- Ultimate Collector Series
- Ultra Agents
- Unikitty™
- VIDIYO™
- Wednesday
- Wicked
- Xtra
- További készletek
Értesülj elsőként a vásárláshoz járó ajándékokról, újdonságokról!

Elfogadom az adatvédelmi szabályzatot
JöhetTörlöm