Moonwalker
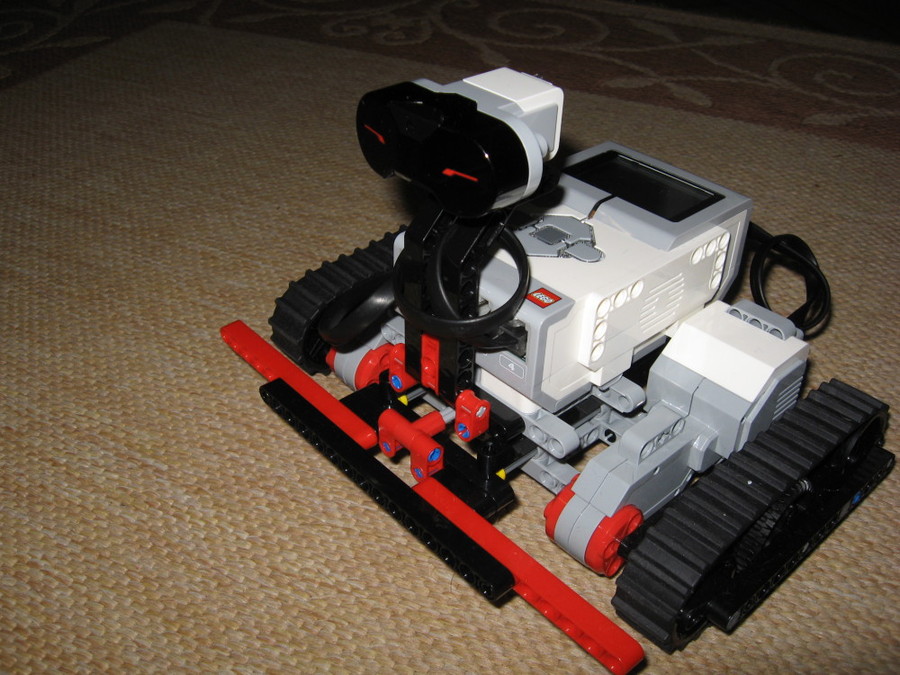
Saját fejlesztésű holdjárót szeretnék bemutetni, amelyet a Mindstorms EV3 alapkészletből építettem. A készlet új állapotban érkezett hozzám, miután kis gyakorlatozást követően kezdtünk összeszokni, megszületett az első saját építésű kreáció, amelyhez a működtető program is teljesen saját fejlesztésű.

Itt a link az elkészült video megtekintéséhez !
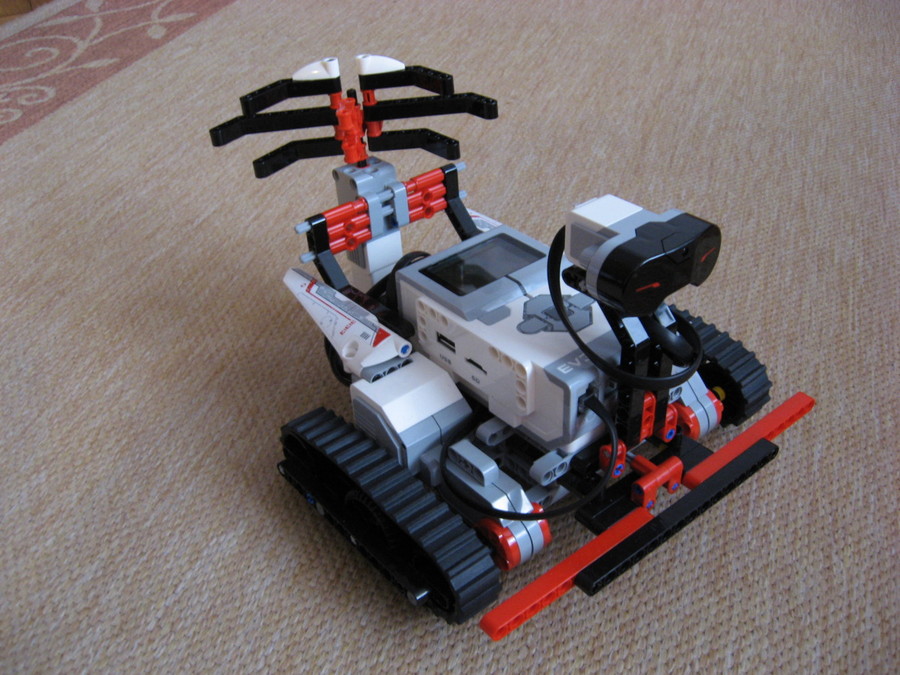
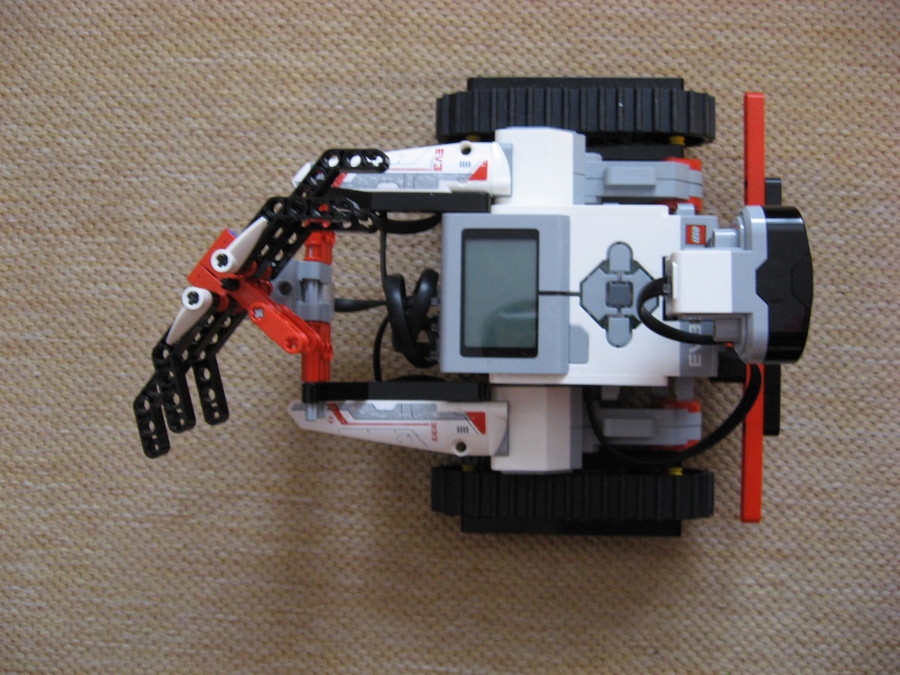
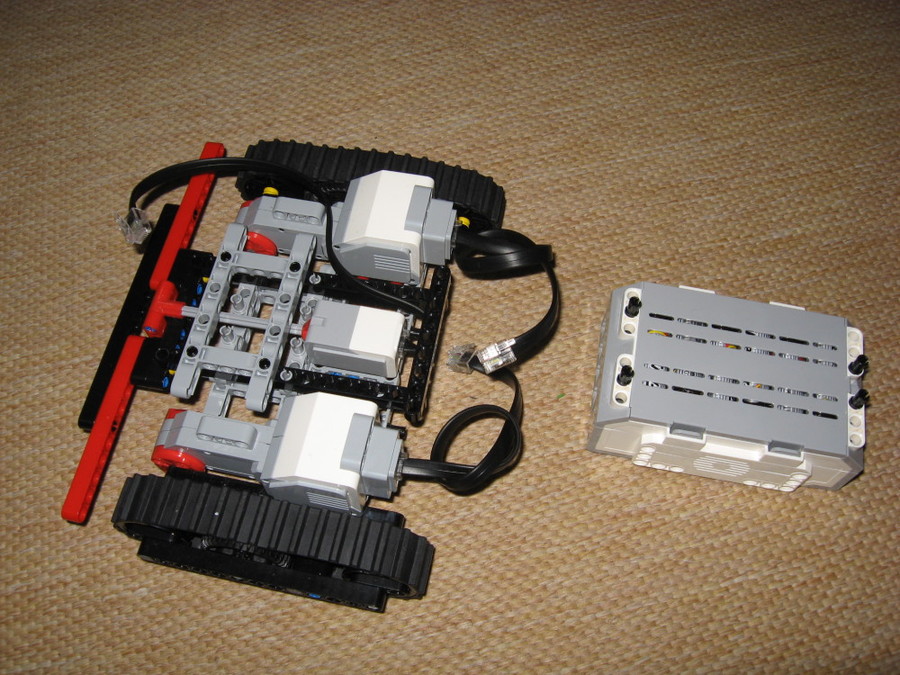
A jármű alvázát a Mindstorm készlet TRACK3R konstrukciója ihlette, a felépítmény, a szenzorok és a EV3 Brick elhelyezése teljesen egyéni konstrukció. Az infra szenzor figyeli a közeledő akadályt, ha sikeresen észleli, akkor a "Good Job" felkiáltás után a robot hátrál és irányt vált, ha ütközés következik be, akkor a jármű szélességével megegyező méretű lökhárító benyomódása működteti az érintés szenzort, ekkor viszont az "Ouch" felkiáltás után hátrál és fordul a robot, jelezve, hogy sajnos a "látása" nem tökéletes :-)
A hátul látható "lokátor" és a mozgás közbeni pittyegés, amely tereptárgy közeledtével emelkedő hangmagasságú, a holdjáró "érzést" hivatott kiemelni. A program futtatását követően készenlétben várja az indítást, amit a "lökhárító" be-ki kattintásával lehet előidézni, innentől kezdve a Brick gombok közül a középső navigáló gomb kattintása teszi "sand By"-ra, majd ismételt kattintása újból mozgásba hozza a járművet. Működés közben a szempár jobbra-balra tekintget.
Lokátor motor az "A" porton, mozgató motorok "B+C" portokon vannak.
Infra szenzor a 4-es porton, érintés szenzor az 1-es porton vannak.
Dokumentáltam az építést, és az elkészült program forráskódját is, alább megtekinthetőek, hátha valaki kedvet kap a megépítéséhez!
 YouTube Video
YouTube Video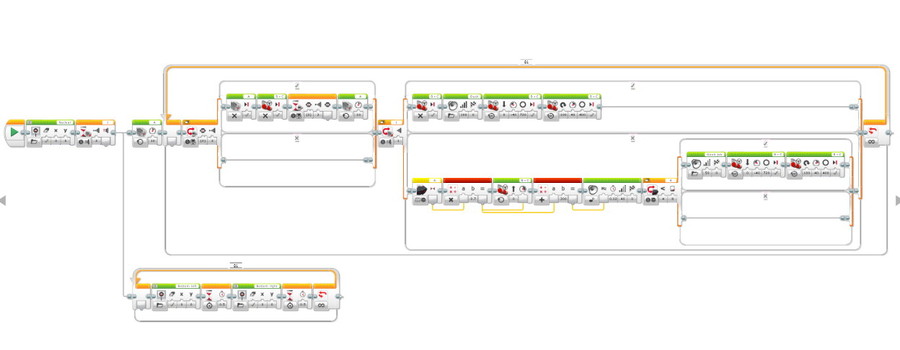 A program forráskódja
A program forráskódja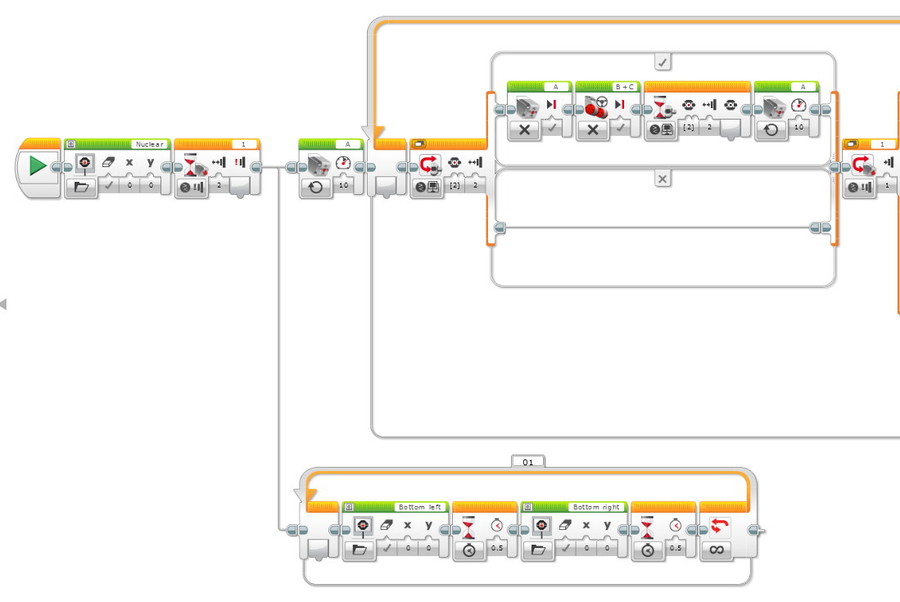 Az első rész nagyítva
Az első rész nagyítva A második rész nagyítva
A második rész nagyítva






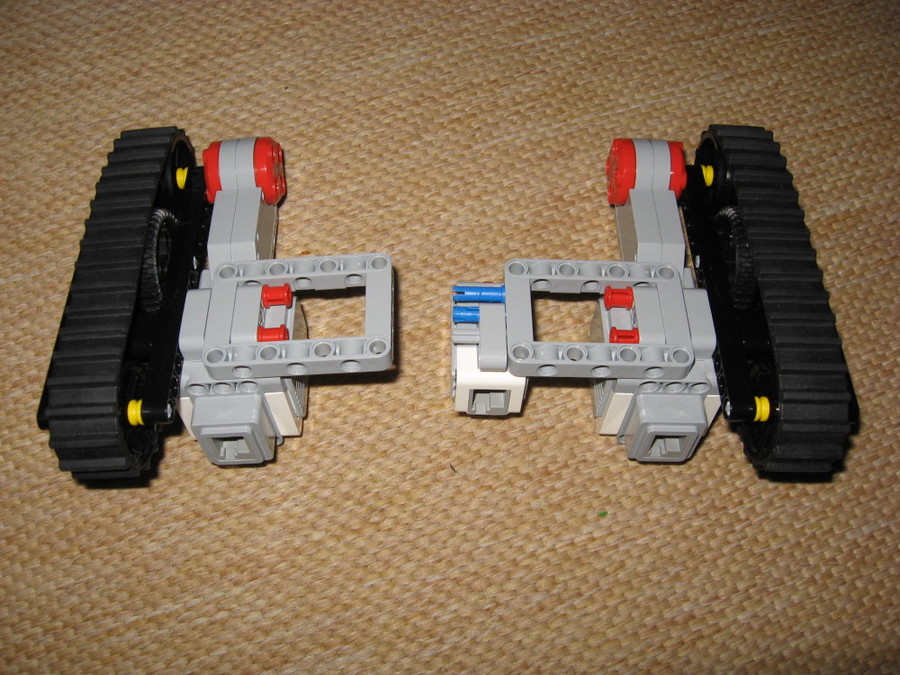
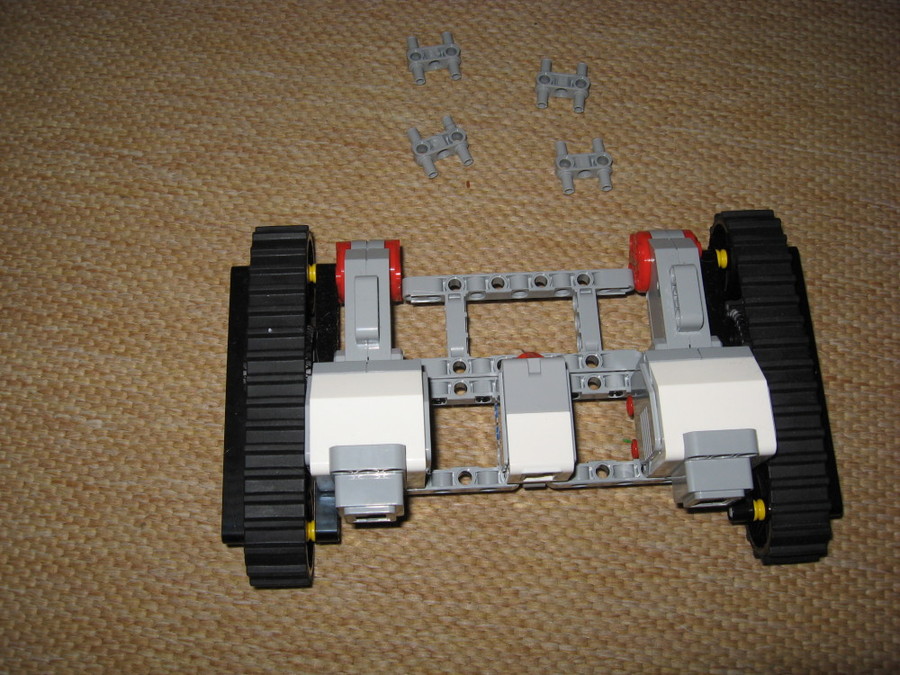
 Ezt meg kell ismételni szinmetrikusan!
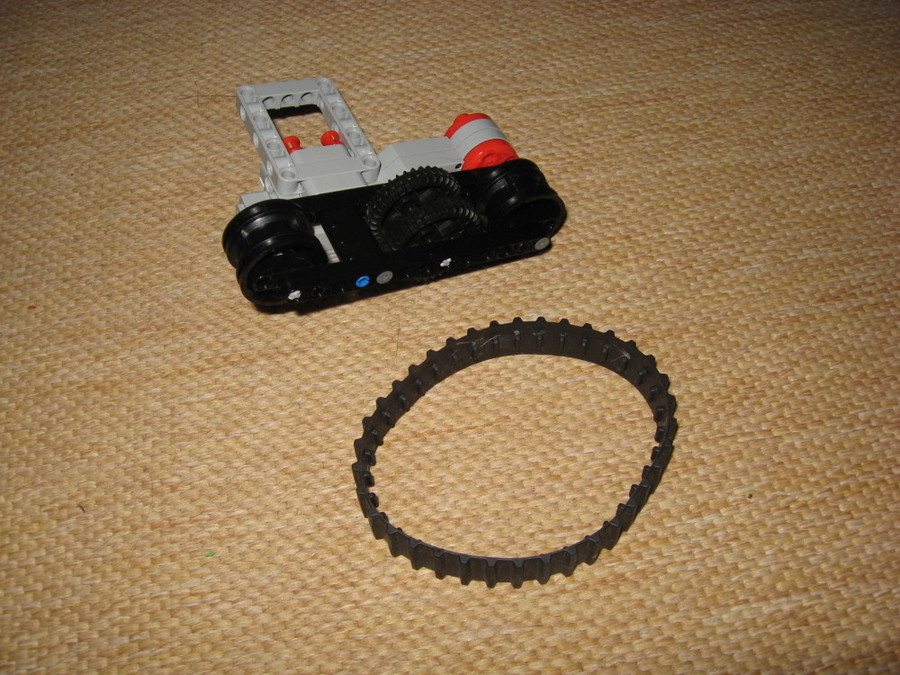
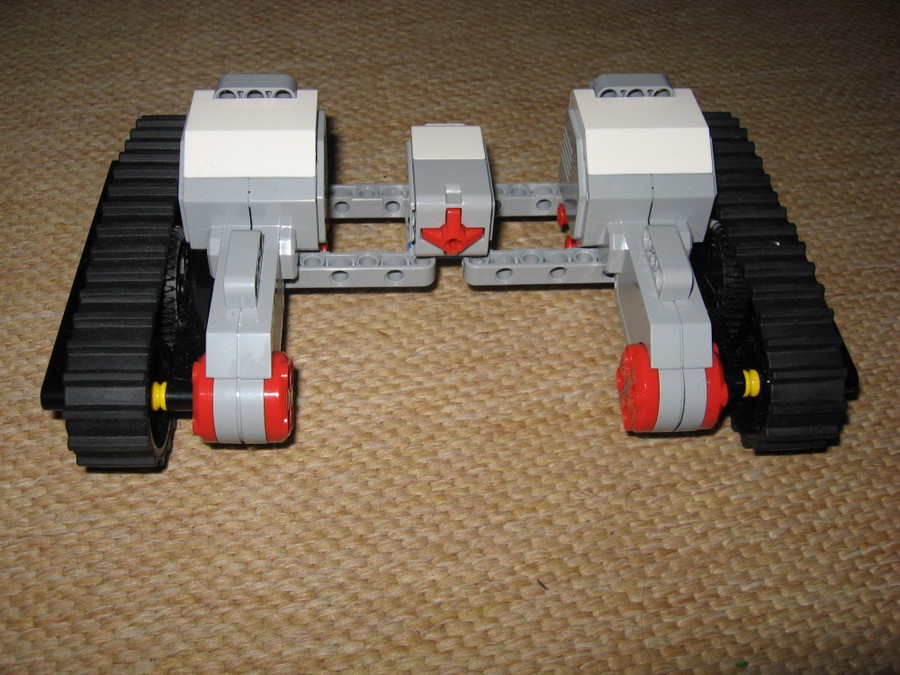
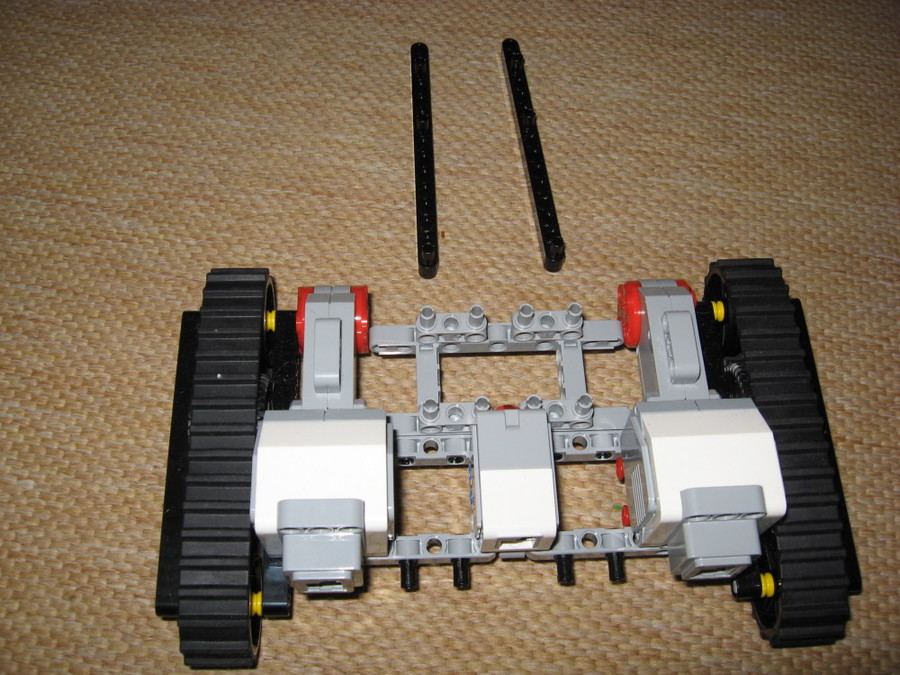
Ezt meg kell ismételni szinmetrikusan! Így kész a két oldal.
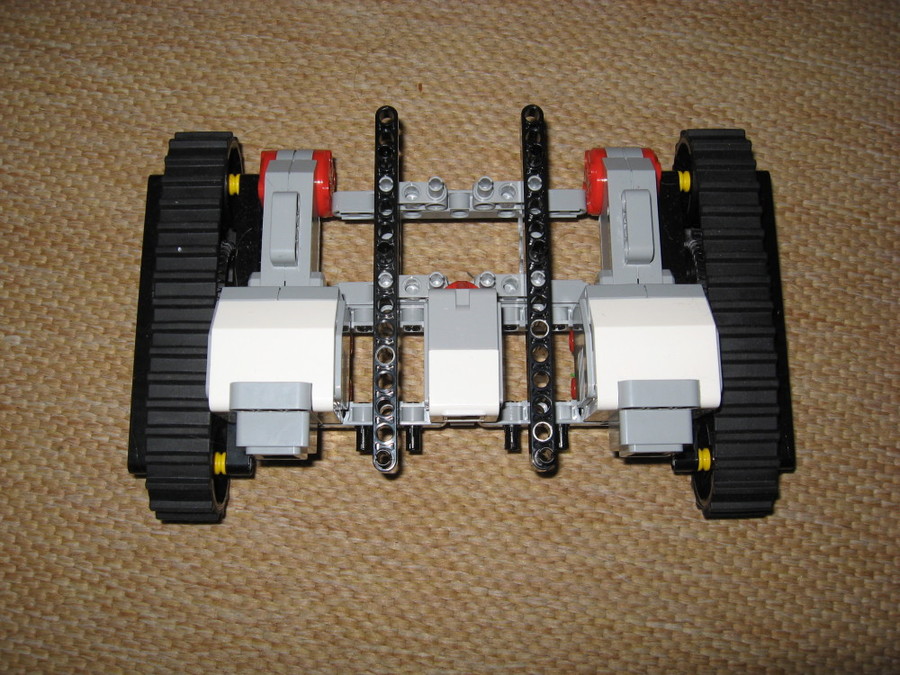
Így kész a két oldal.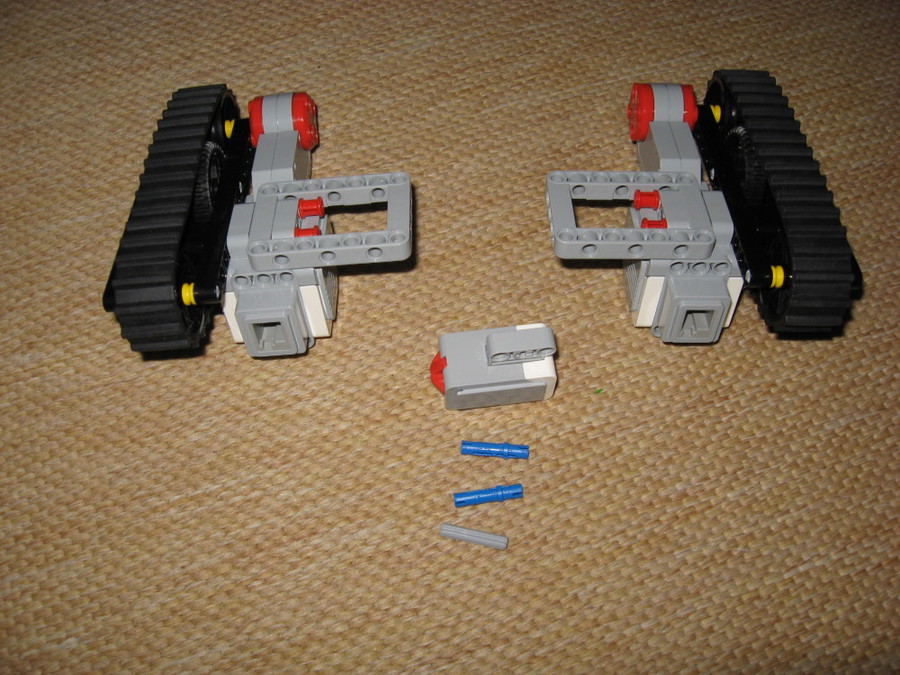
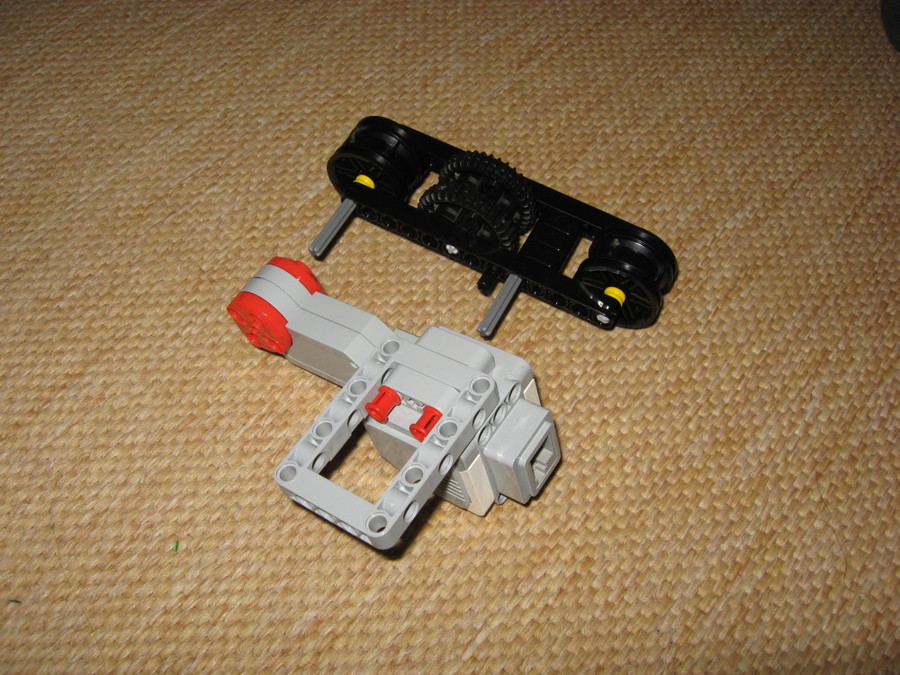
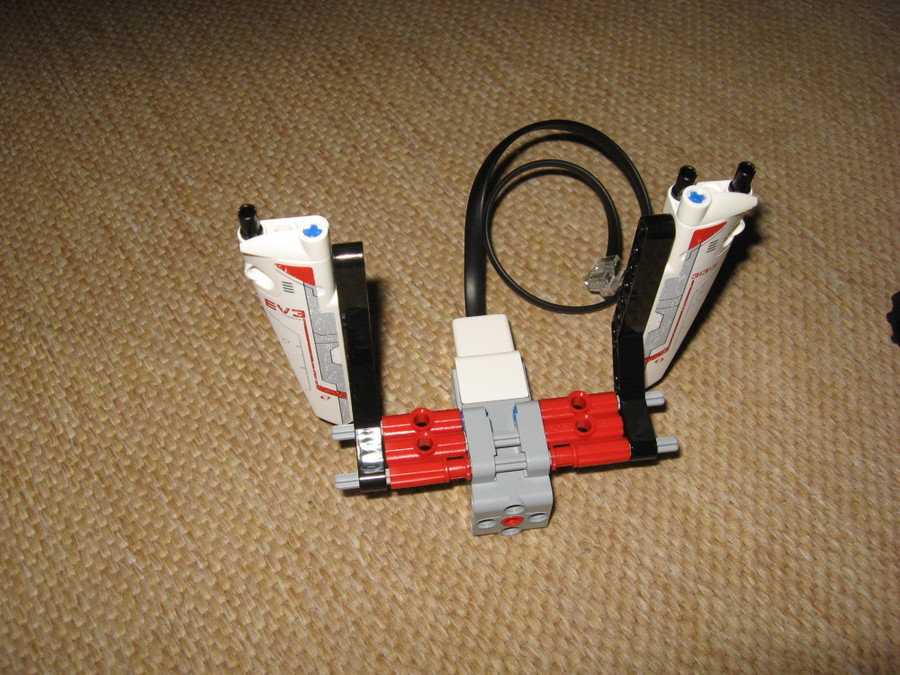
 Az érintés szenzor az alvázra kerül
Az érintés szenzor az alvázra kerül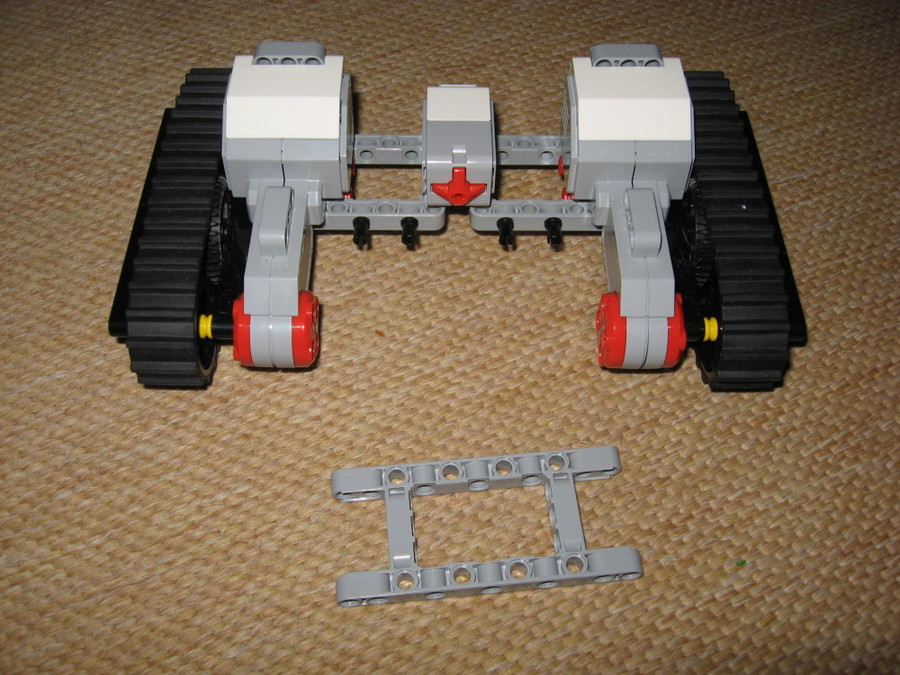
 A lökhárító építése
A lökhárító építése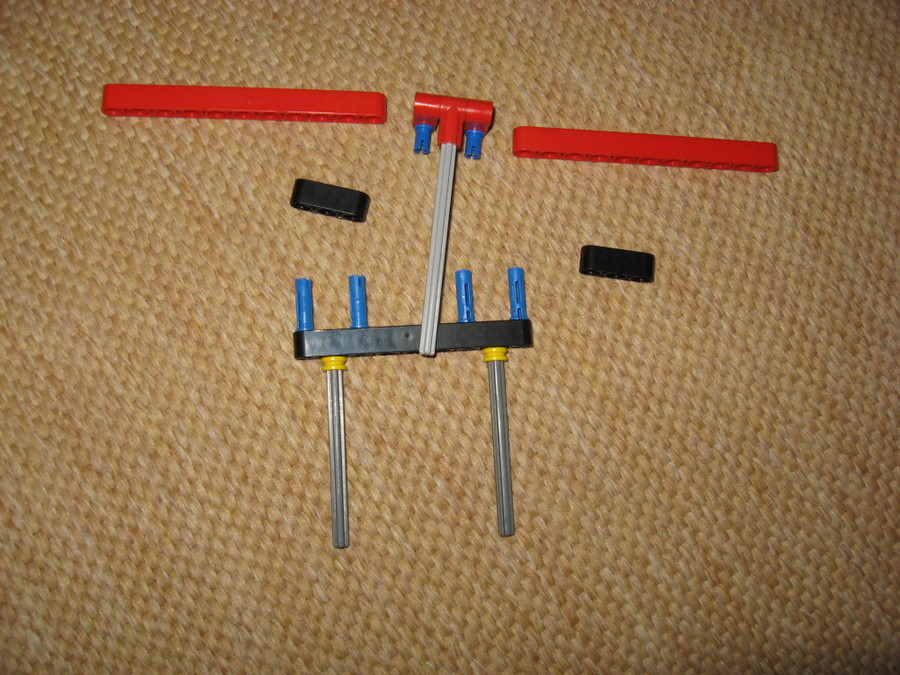


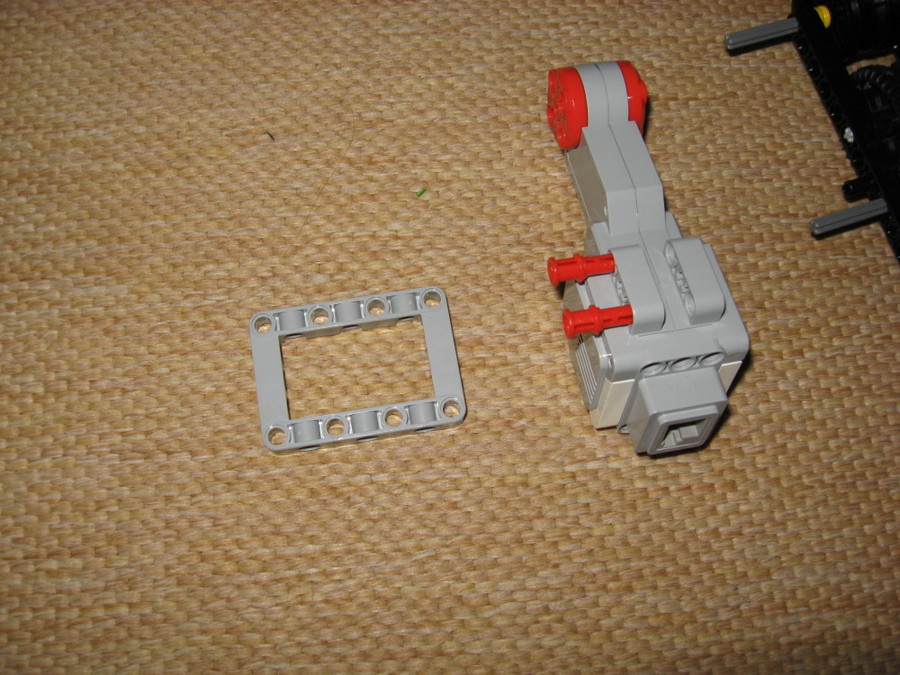
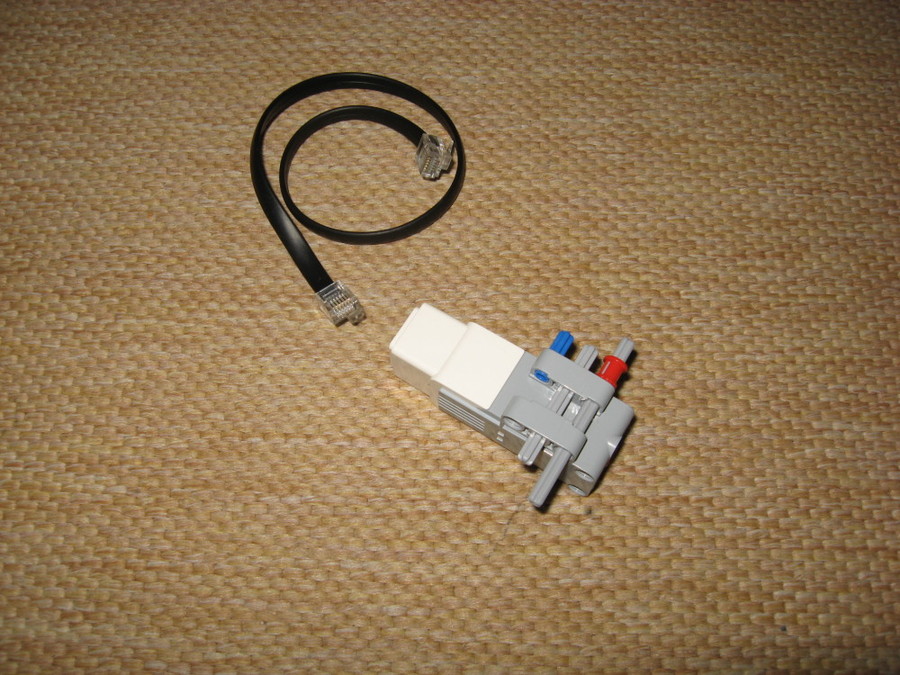
 Az infra szenzor ráépítése
Az infra szenzor ráépítése

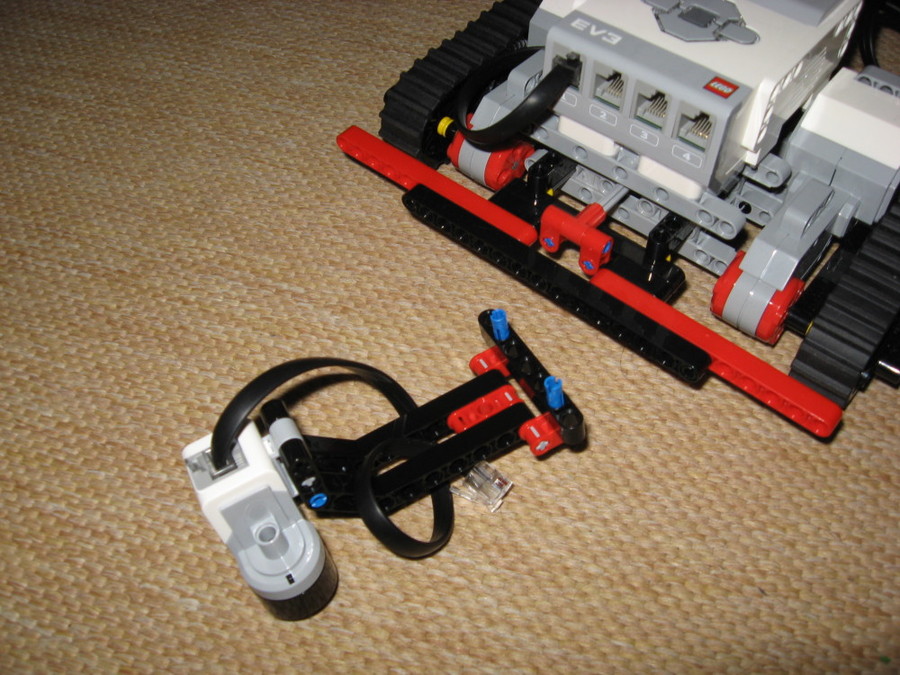
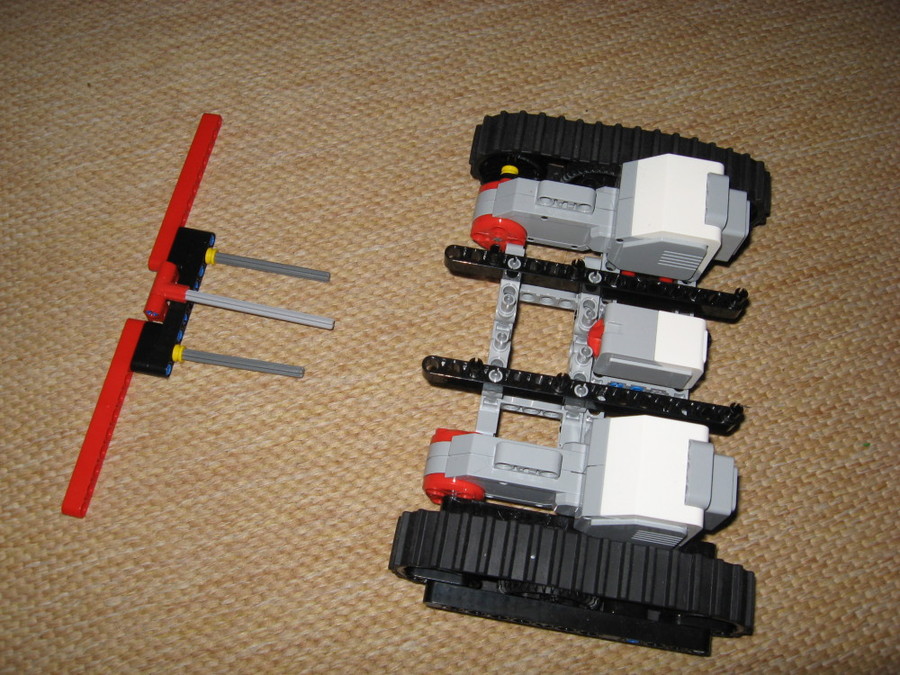
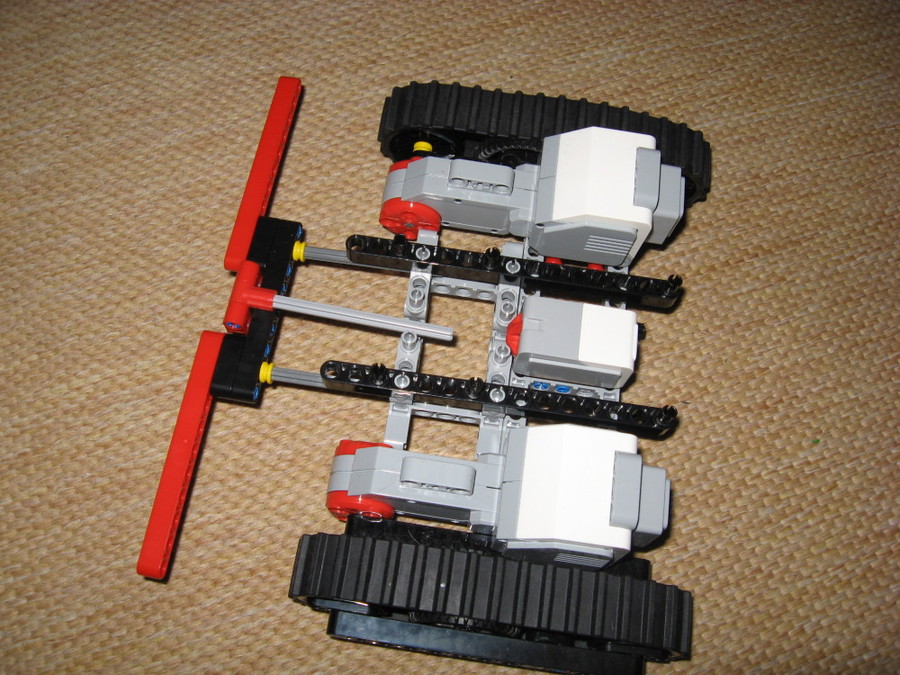
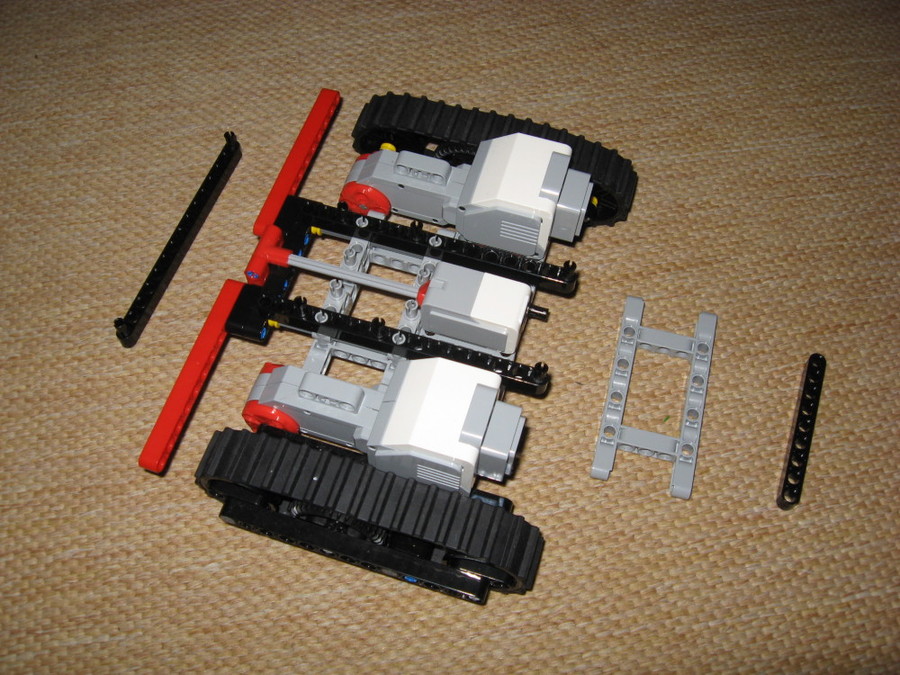
 A "lokátor" építése
A "lokátor" építése




 És mehet is a programozás !
És mehet is a programozás ! 2014 december 28, 14:54
- 2016 LEGO Újdonságok
- 2017 LEGO® Újdonságok
- 2018 LEGO® Újdonságok
- 2019 LEGO® Újdonságok
- 2020 LEGO® Újdonságok
- 2021 LEGO® Újdonságok
- 2022 LEGO® Újdonságok
- 2023 LEGO® Újdonságok
- 2024 LEGO® Újdonságok
- 60. évfordulós készletek
- Angry Birds
- Animal Crossing™
- Architecture
- Art
- Atlantis
- Avatar
- Bionicle
- Brick Sketches™
- BrickHeadz
- Chima
- City
- Classic
- Creator 3-in-1
- Creator Expert
- DC
- Disney Princess™
- Disney™
- DOTS
- DREAMZzz™
- DUPLO®
- Elves
- Fortnite™
- Friends
- Gabby babaháza
- Ghostbusters™
- Gyűrűk Ura
- Harry Potter™
- Hidden Side
- ICONS
- Ideas - CUUSOO
- Indiana Jones
- Juniors
- Jurassic World
- Kaland - LEGO Movie
- Karib tenger kalózai
- Kastély, LEGO Vár (Kingdoms)
- Large Models
- Lone Ranger
- Marvel
- MINDSTORMS®
- Minecraft™
- Minions®
- Mixels
- Monkie Kid™
- Monster Fighters
- NEXO KNIGHTS™
- NINJAGO®
- Overwatch®
- Pirates
- Polybag - Mini készletek
- Power Functions
- Powered Up
- Scooby-Doo
- Sérült doboz
- Sonic the Hedgehog™
- Speed Champions
- Star Wars™
- Star Wars™ gyűjtői készletek
- Stranger Things
- Super Mario
- Technic
- The Legend of Zelda™
- THE LEGO® BATMAN MOVIE™
- Trollok®
- Ultimate Collector Series
- Ultra Agents
- Unikitty™
- VIDIYO™
- Wednesday
- Wicked
- Xtra
- További készletek
Értesülj elsőként a vásárláshoz járó ajándékokról, újdonságokról!

Elfogadom az adatvédelmi szabályzatot
JöhetTörlöm