Egyedi Mindstorms RCX 2.0 robot


Fiam 13. születésnapjára egy igen szép állapotú dobozos hiánytalan 3804 Mindstorms RCX 2.0 készletet kapott 2001-ből. A fertőzés természetesen HSzabi barátunktól jött, konkrétan a szettet is ugyanattól az eladótól vettem, mint ő. Nálunk a helyzet annyiból más, hogy szereztem hozzá angol nyelvű útmutatót és főként CD-t, mert németül nem tanul fiunk, és másrészről a Windows XP szintén 2001-es környezethez is, amiben legkézenfekvőbben programozni lehet ezt a Mindstorms készletet, kicsit felújítottam egy még valóban IBM Thinkpad T42-es notebookot, ami, akárcsak a fiam, 13 éves.
Hogy rövidre fogjam a bevezetést: jól megtanulta az RCX kocka összekapcsolását a számítógéppel, a programozásba is lassan egyre mélyebbre halad, és így persze jó pár robotot megépített már a készletből. Először végignézte a kezdő lépések leckét a cd-ről, ahogy azt szabályosan kell, mivel így lehet megtanulni, melyik motor és melyik érzékelő melyik portjára köthető az RCX kockának. Aztán a kezdőnek ajánlott Roverbot robotot készítette el, és ennek azt hiszem nem csak a részletesen leírt modelljét, de a cd-én található kihívásait is végig összerakta. Aztán néhány egyéb saját ötletű modelljében is felhasználta az RCX kockát, írt a tüzijátékról például, amit szilveszterkor csinált. Most pedig egy elég összetett robotról - az Inventorbot egy továbbfejlesztett példányáról - írt naplót, lefényképeztük, videót is csináltunk róla, ez következik.

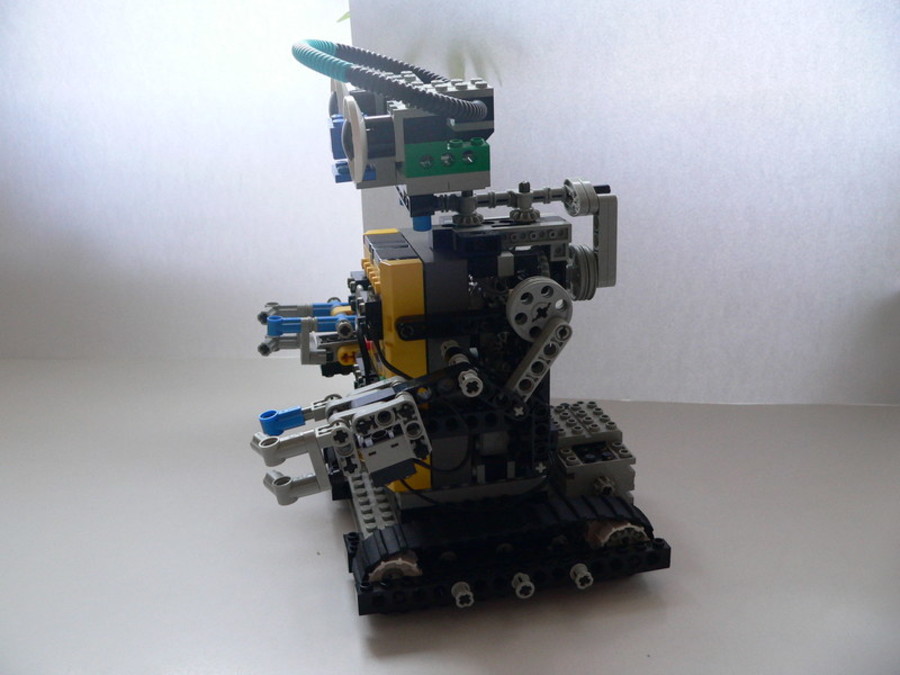
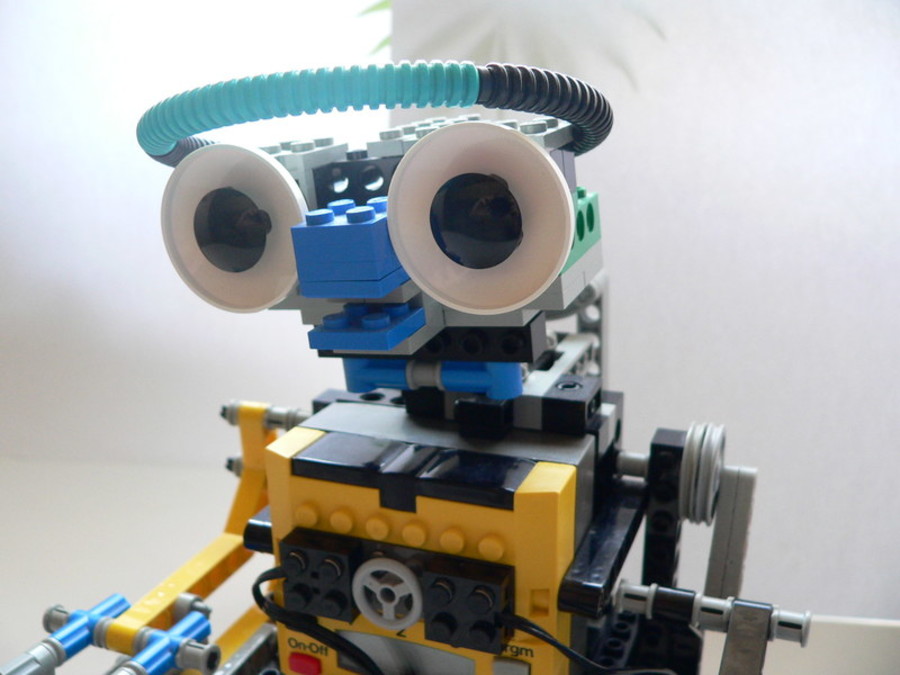
Ez a napló egy félig saját építésű robotról szól. Félig az RCX 2.0 készlet Inventorbotja, félig saját építés. A terv egy lánctalpakon mozgó, két karján touch-szenzorral felszerelt robot építése volt, jó bonyolult működéssel.
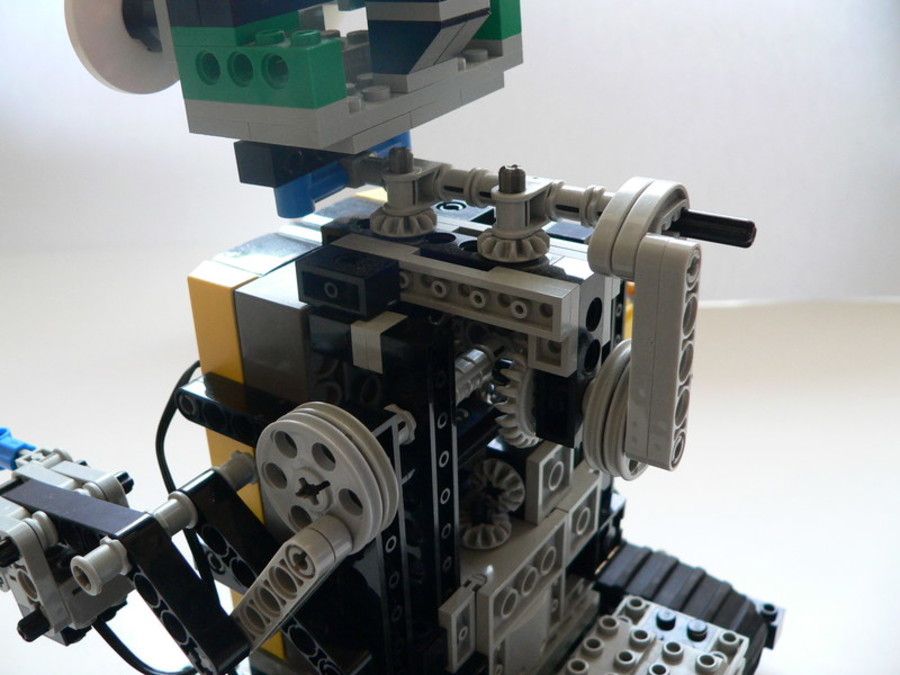
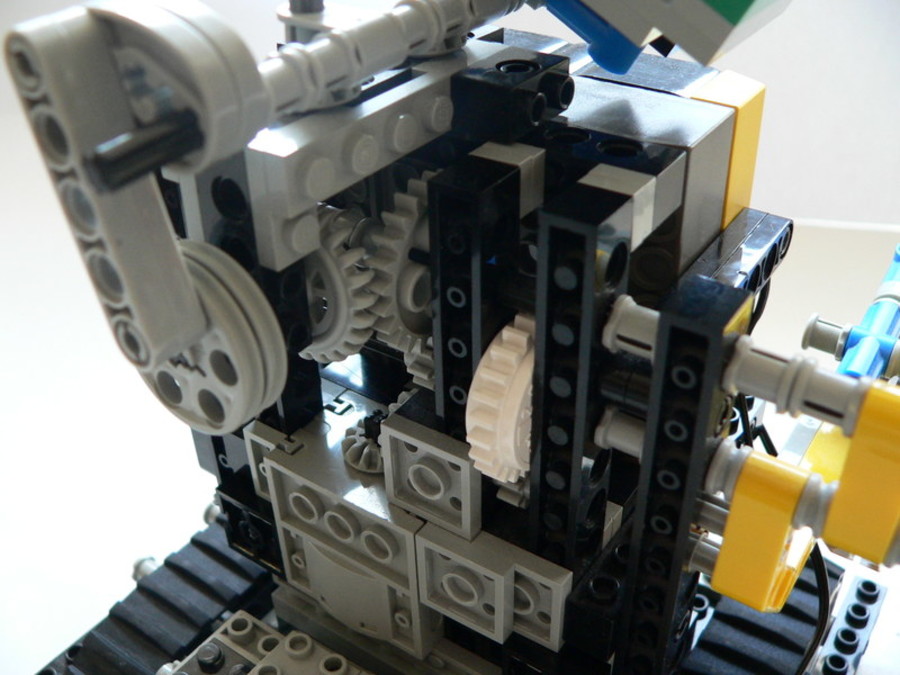
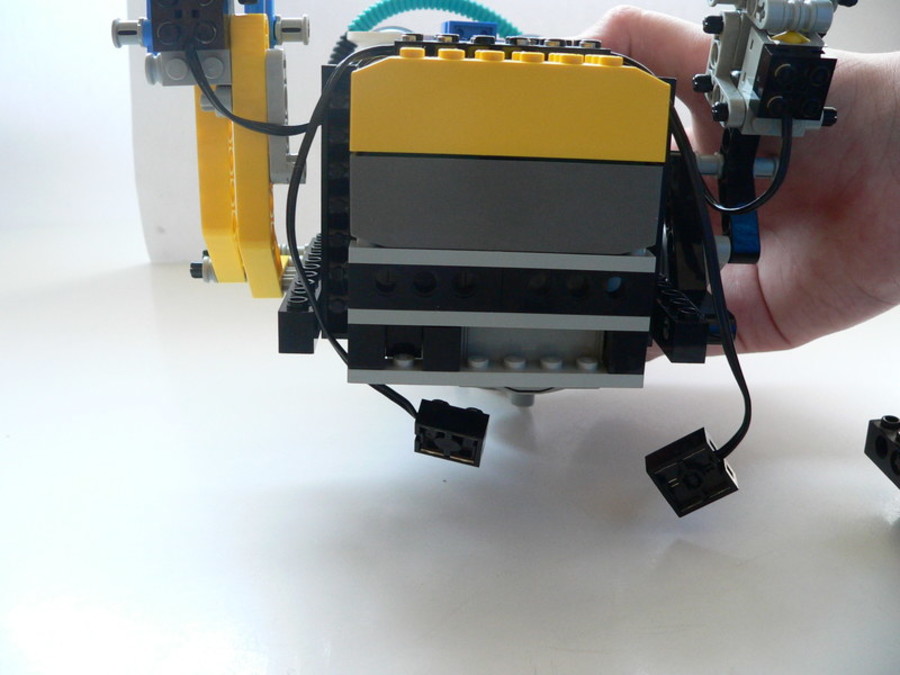
Az építésekor a törzset az Inventorbot útmutatója alapján készítettem, csak úgy, mint a robot fejét. Ez az alap konstrukció tartalmazza az RCX kockát és egy karmozgató motort, lassító áttételekkel.
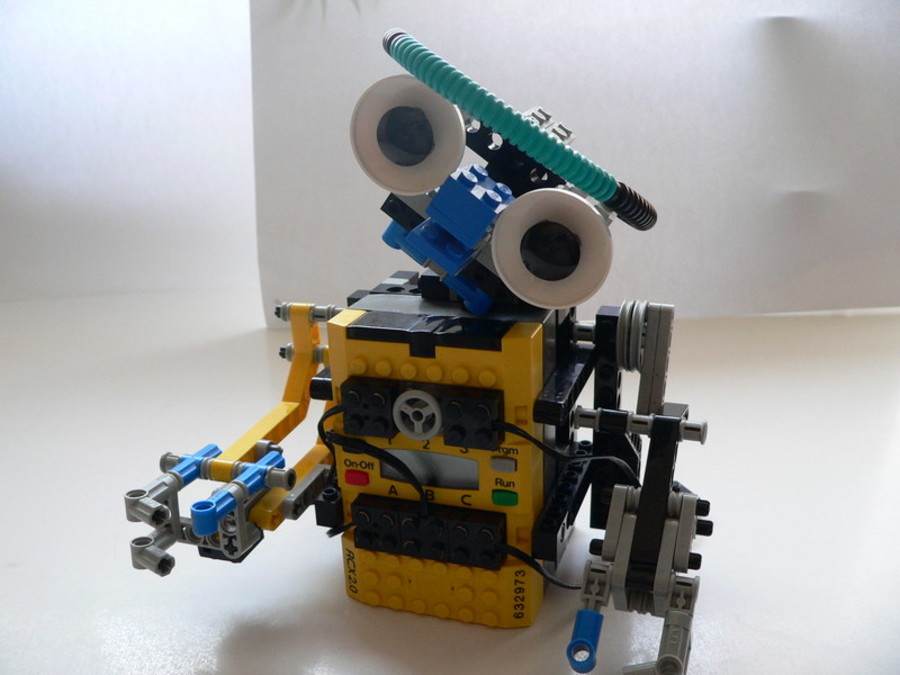
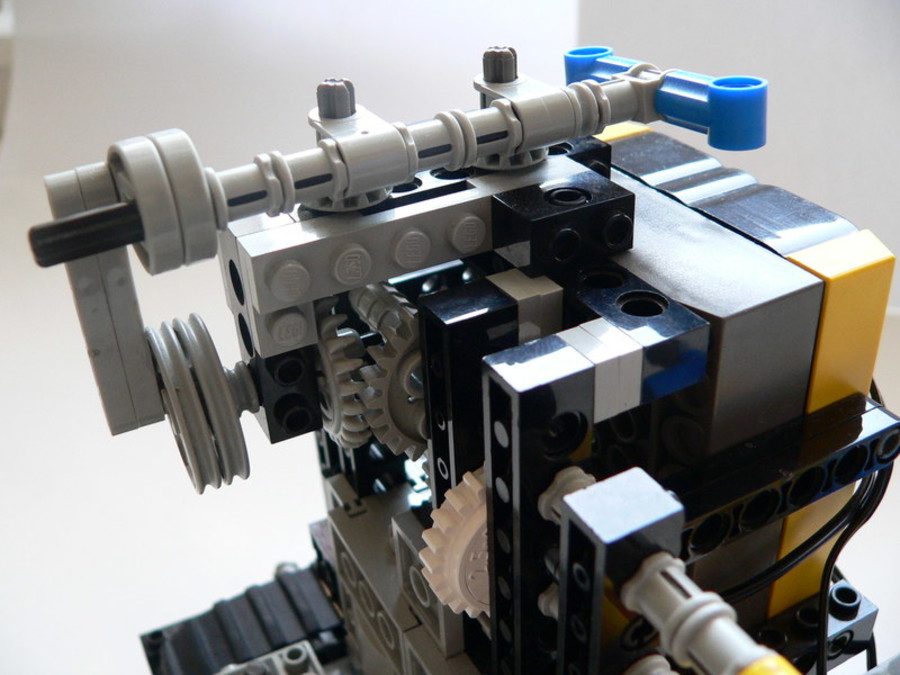
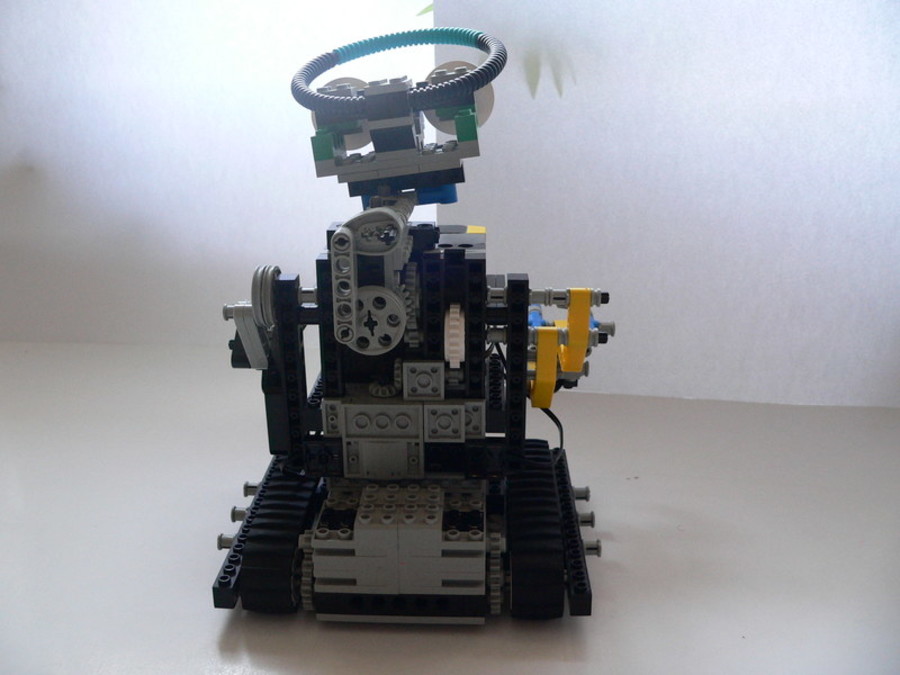
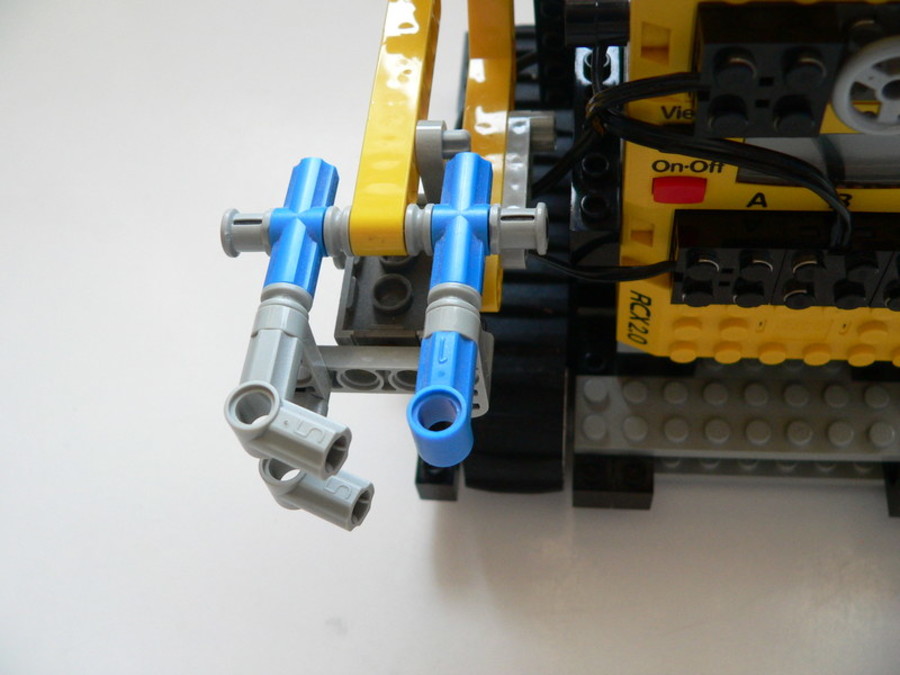
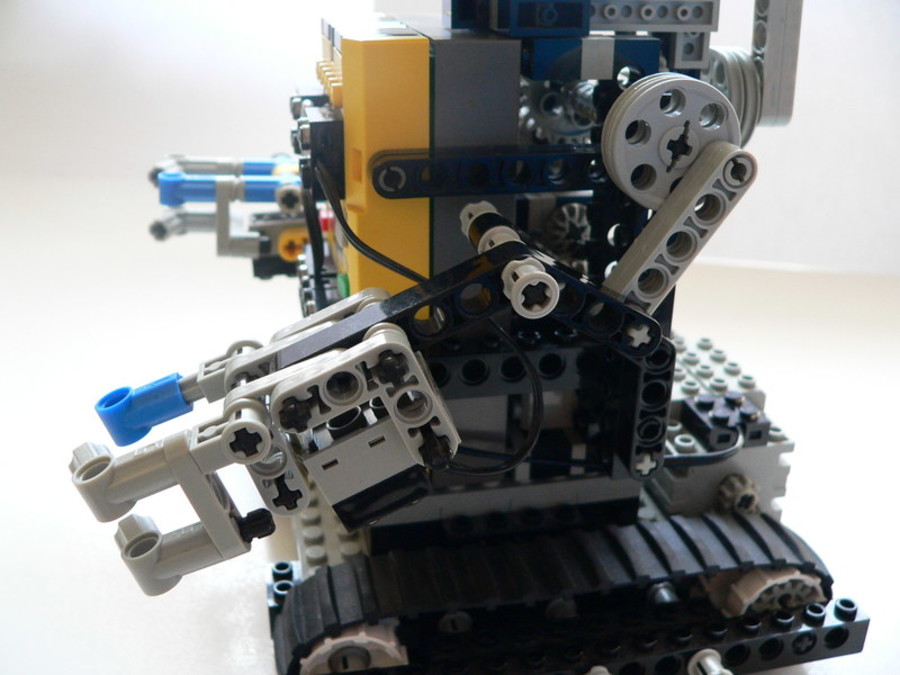
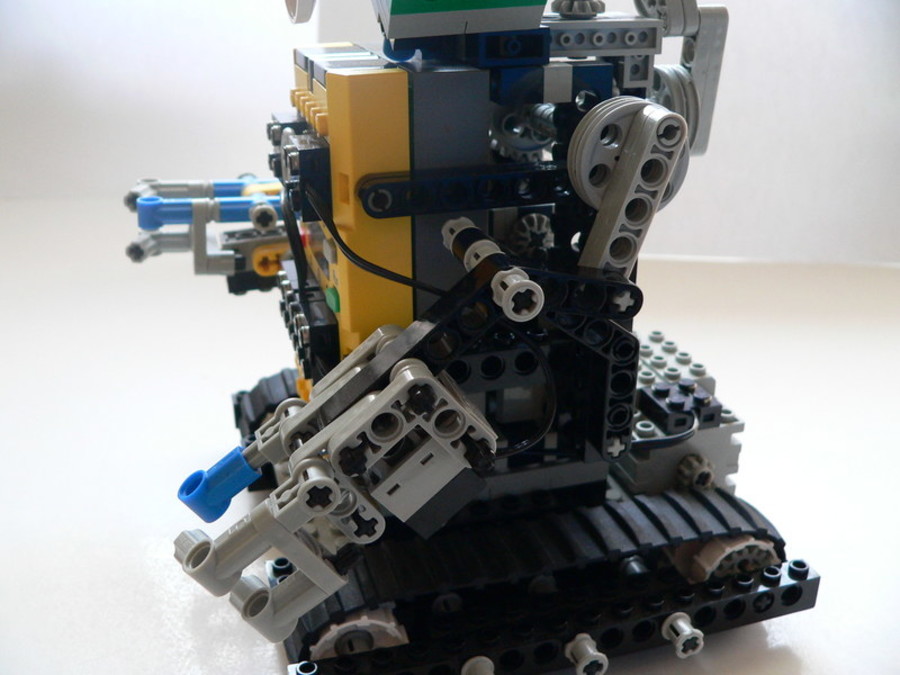
Ezután a bal (motorizált) kar következett. Ez sem saját ötlet, az útmutató hátuljában lévő, csak kép alapján megépíthető kiegészítők közül való, ahogy a fej-mozgató mechanizmus is. A touch-szenzorral felszerelt kéz viszont saját építmény.
A következő lépés a jobb kar összerakása volt. Ez már tényleg nem lett olyan szép (kezdtem kifogyni az elemekből), de működik, és itt az a lényeg.

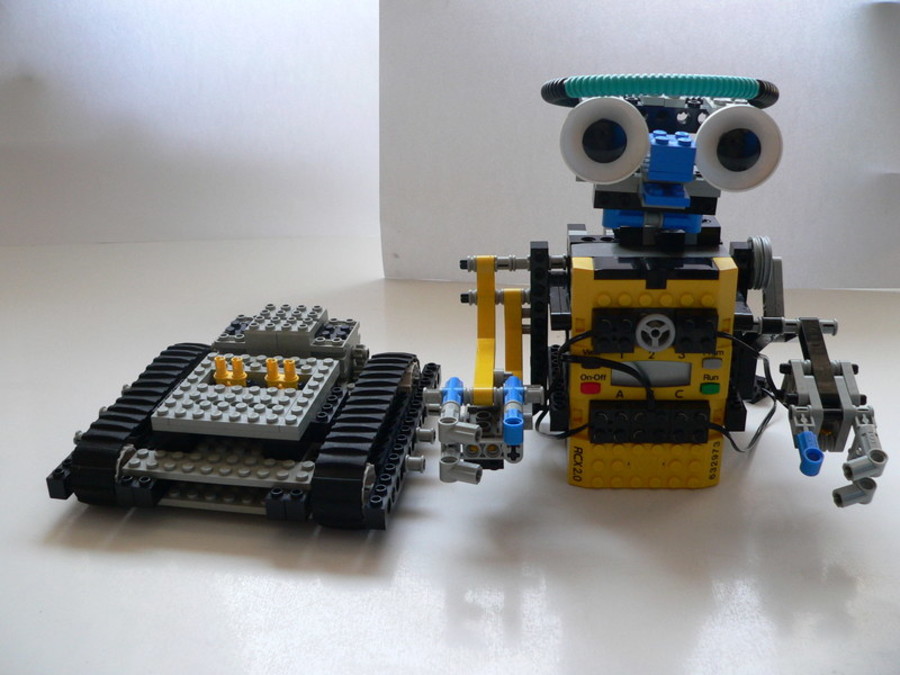
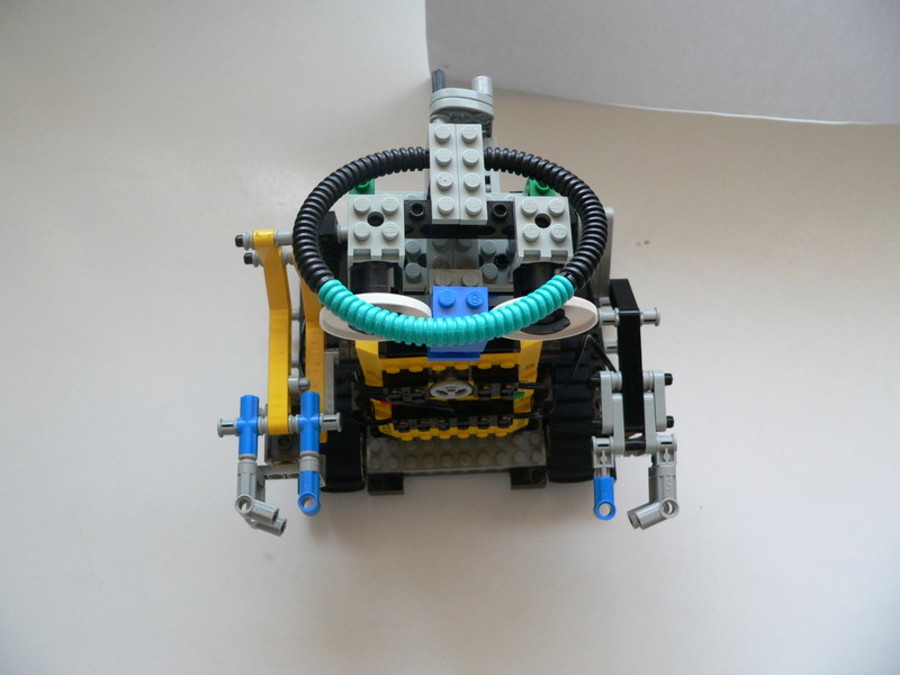
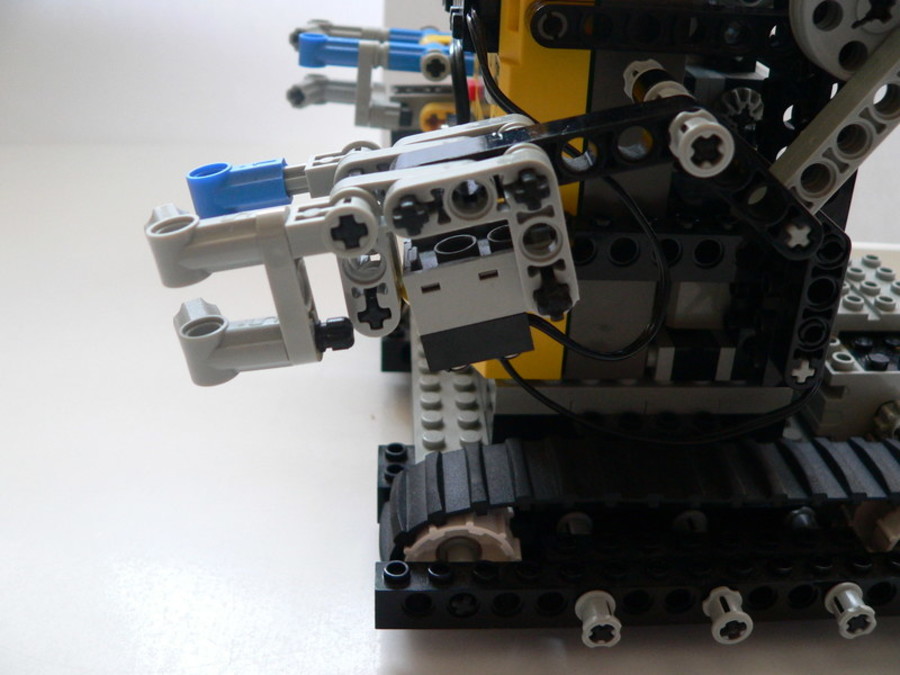
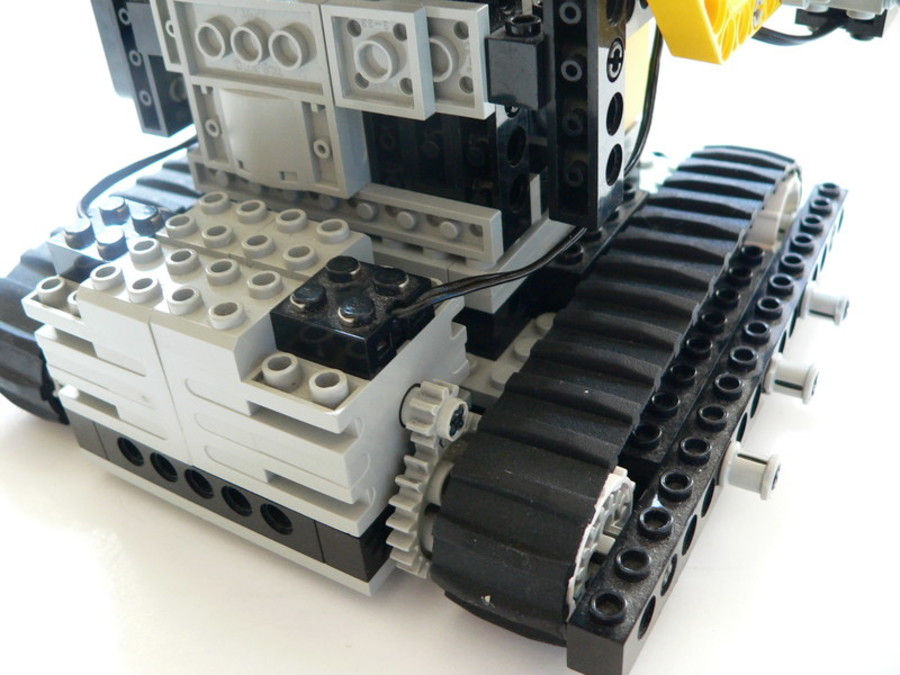
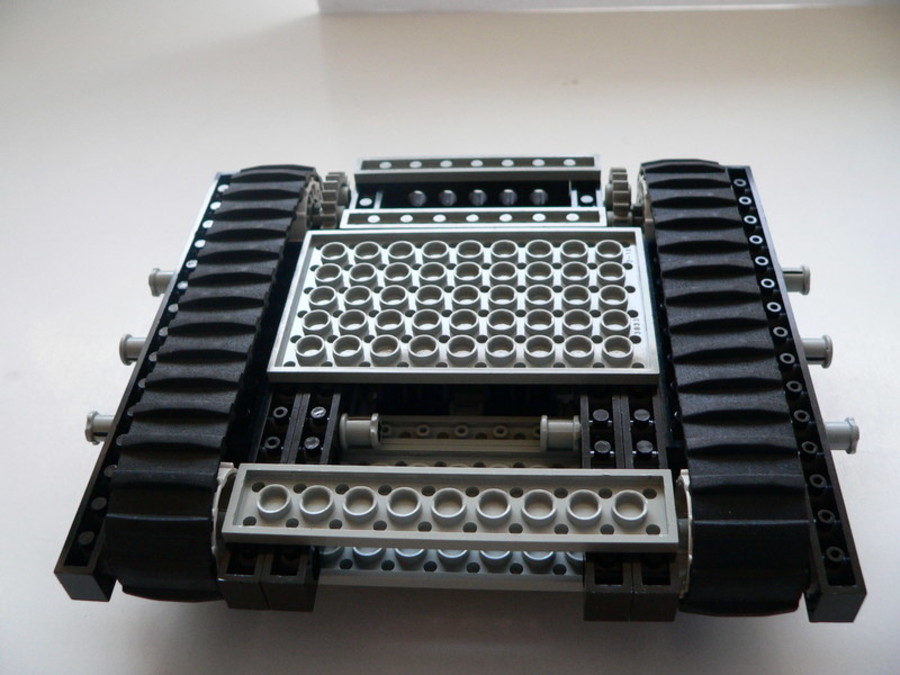
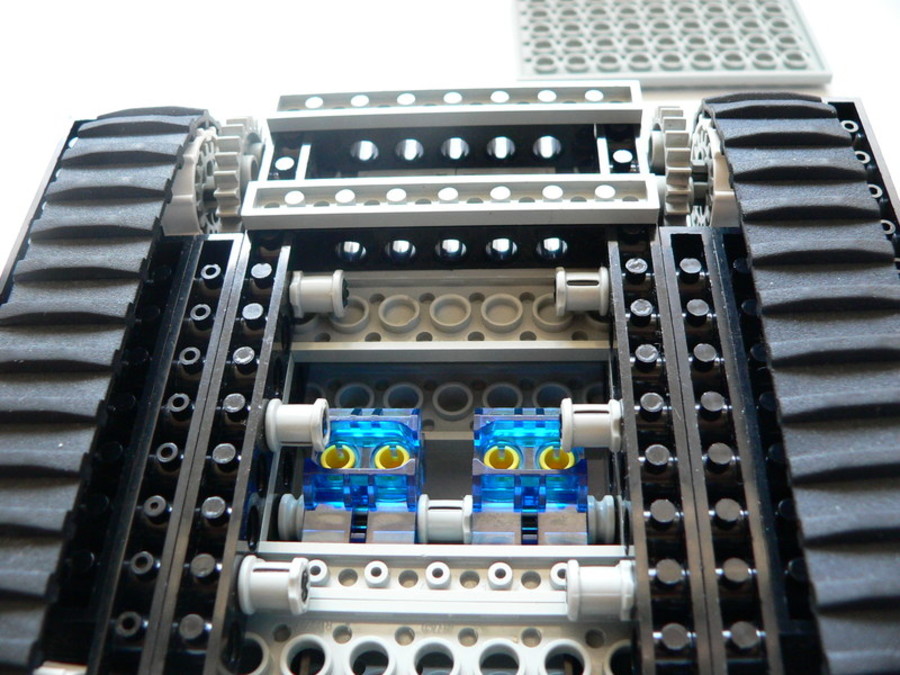
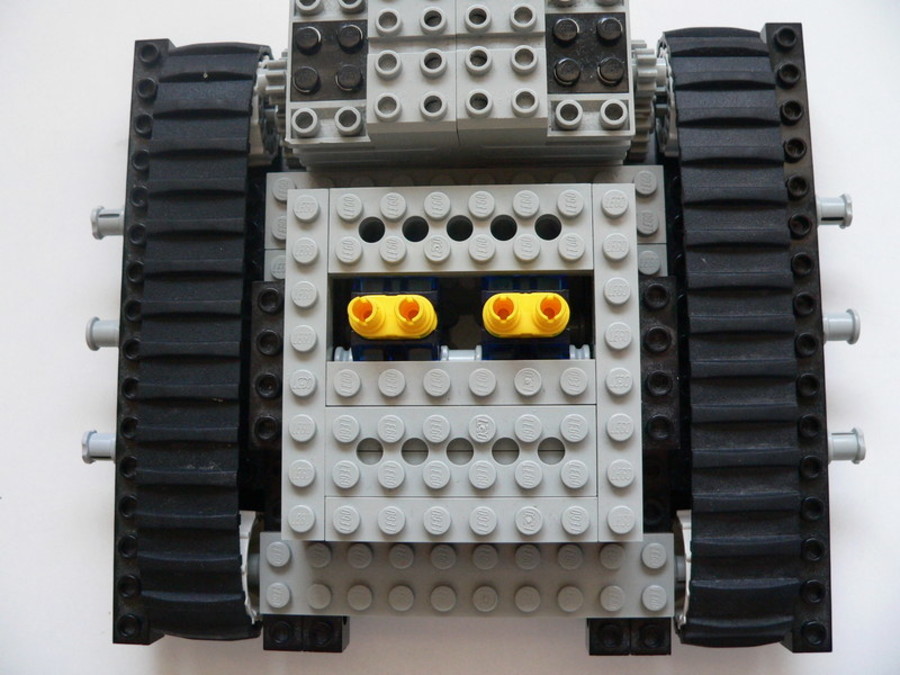
Végül egy lánctalphajtást építettem meg. Ehhez az útmutató is kínált egy változatot, innen is dolgozhattam volna, de a gyári modell csak egy motorral működik (előre menetkor egyenesen megy, hátrafele pedig kanyarodik), emiatt döntöttem a saját verzió mellett, hiába lett volna szebb a másik.

Ide beépítésre került egy plusz motor is (az RCX kockának 3 kimenete van, de a szett csak 2 motort kapott), és úgy építettem meg, hogy a törzs csak pinekkel rögzüljön, könnyen levehető legyen az aljról.
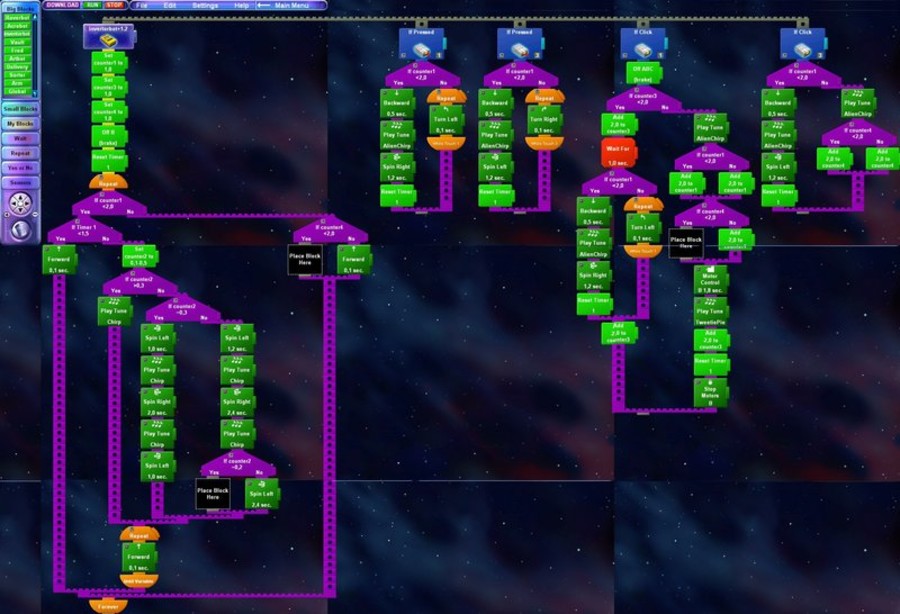
A robot nagyon bonyolult programot kapott, először a videót mutatom meg, aztán jönnek a részletek.
)
A robot alap állapotban előre megy, és ütközés esetén (amit a karjával érzékel) hátra gurul, majd elfordul az ütközés oldalával ellentétesen (vagyis ha a bal kar nyomódik be, jobbra fordul, ha pedig a jobb, akkor balra). Ezt a mozgást bonyolítja még az, hogy az ütközéstől számolva két másodpercre véletlenszerűen vagy pittyegés kíséretében egyenesen megy tovább, vagy jobbra-balra szétnézés után egy random irányba indul.
Azonban a jobb kéz kétszeri gyors megnyomására a robot funkciót vált, amit fej és karmozgatás kísér. Ettől kezdve kézi irányított módban működik, a jobb kar újbóli benyomásaira. Ebben a módban alaphelyzetben egy helyben áll, a jobb vagy a bal kar nyomására pedig a benyomott kar irányába fordul el, bal klikkelésre pedig előrefele halad.
A részletek után érdeklődők számára a programozási felületről is készült egy több kis képből összeszerkesztett kép, ezen a robot egész programozási folyamata áttekinthető.
Köszönjük, hogy elovastad.


2017 június 16, 15:31
- 2016 LEGO Újdonságok
- 2017 LEGO® Újdonságok
- 2018 LEGO® Újdonságok
- 2019 LEGO® Újdonságok
- 2020 LEGO® Újdonságok
- 2021 LEGO® Újdonságok
- 2022 LEGO® Újdonságok
- 2023 LEGO® Újdonságok
- 2024 LEGO® Újdonságok
- 60. évfordulós készletek
- Angry Birds
- Animal Crossing™
- Architecture
- Art
- Atlantis
- Avatar
- Bionicle
- Brick Sketches™
- BrickHeadz
- Chima
- City
- Classic
- Creator 3-in-1
- Creator Expert
- DC
- Disney Princess™
- Disney™
- DOTS
- DREAMZzz™
- DUPLO®
- Elves
- Fortnite™
- Friends
- Gabby babaháza
- Ghostbusters™
- Gyűrűk Ura
- Harry Potter™
- Hidden Side
- ICONS
- Ideas - CUUSOO
- Indiana Jones
- Juniors
- Jurassic World
- Kaland - LEGO Movie
- Karib tenger kalózai
- Kastély, LEGO Vár (Kingdoms)
- Large Models
- Lone Ranger
- Marvel
- MINDSTORMS®
- Minecraft™
- Minions®
- Mixels
- Monkie Kid™
- Monster Fighters
- NEXO KNIGHTS™
- NINJAGO®
- Overwatch®
- Pirates
- Polybag - Mini készletek
- Power Functions
- Powered Up
- Scooby-Doo
- Sérült doboz
- Sonic the Hedgehog™
- Speed Champions
- Star Wars™
- Star Wars™ gyűjtői készletek
- Stranger Things
- Super Mario
- Technic
- The Legend of Zelda™
- THE LEGO® BATMAN MOVIE™
- Trollok®
- Ultimate Collector Series
- Ultra Agents
- Unikitty™
- VIDIYO™
- Wednesday
- Wicked
- Xtra
- További készletek
Értesülj elsőként a vásárláshoz járó ajándékokról, újdonságokról!

Elfogadom az adatvédelmi szabályzatot
JöhetTörlöm