City Tehervonat EV3 irányítással
!! 2014.02.22-én Fejlesztettünk egy motorizált vagon leakasztóval! Részletek az írás végén!
Az alábbiakban azt ismertetem Nektek, hogy hogyan jutottunk el egy ilyen, teljesen automatikusan működő Lego Train asztal elkészítéséig, a végén pedig az IR távirányítású vonatok energia fogyasztásának csökkentési lehetőségét mutatom meg:

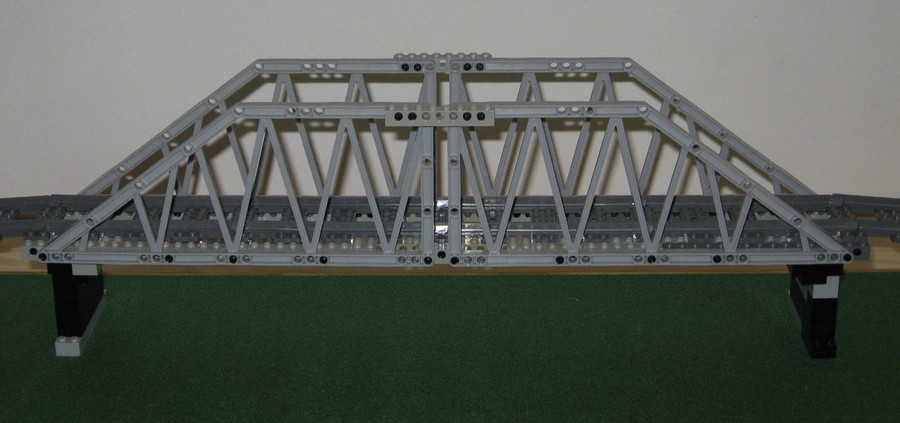
A lendület onnan eredt, hogy a napokban ráleltem egy használt 7900 Heavy Loader készletre (dobozzal, leírással, pótolható darab hiányokkal), amely rakománya pont egy olyan híd, amilyen egy tipikus vasuti hid, ezért jött az ötlet, hogy a kamionról leveszem és építünk egy olyan pályát, amelybe ezt beillesztjük, ráadásul a sima, szürke útburkoló elemeiből kiváló állomás peron lett!
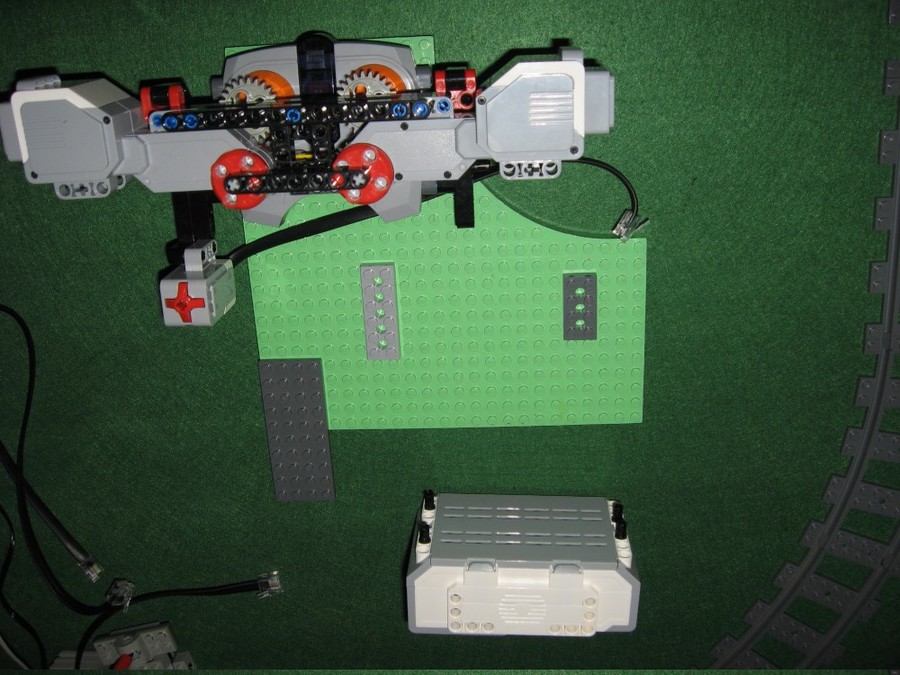
Persze valahogy fel is kell juttatni a sineket erre a magasságra, amihez kicsit nagyobb helyre volt szükség, mint ahogy előzetesen gondoltam, a képeken látható, hogy a készlet alap sín készletéből ezt mgvalósítani lehetetlen, én már jó ideje vadászom az elfogadható áron kínált síndarabokat, mára már van annyi, hogy egy ilyen rendszert éppen össze tudok rakni belőle. A kis "terepasztalunk" hosszabbik mérete (2,5 m) elegendőnek bizonyult a feladat megoldásához:

Ez a napló nem a vonat megépítéséről fog részleteket bemutatni, kivétel ez alól az energiatakarékossá alakítás lépései, hiszen annak módja elérhető akár az interneten, akár a készletben, hanem inkább azokat az egyedi megoldásokat fogja tárgyalni, amik ezt a rendszert működőképessé tszik. Az első feladat a sinek fokozatos emelkedésének megoldása volt, miután az elfogadhatóan realisztikus látvány érdekében a híd pilléreit 7 brick magasra kellett építeni, ehhez jött hozzá a híd 1 brick magas, technic elemekből kialakított alapja, így a sinek 8 brick magasan futnak az asztal lapjától. Elfogadhatóan stabil rendszert úgy sikerült alkotni, hogy a sinek toldási pontjánál építettem a pilléreket, a híd két oldalán szimmetrikusan, a hídtól távolodva 1-1 brickkel alacsonyabb kivitelben. Az utólsó, egy egység magas pillért követő sín toldási ponthoz tettem 1-1 2x8-as lapos bricket. A hely szűke miatt az ívek is benne vannak az emelkedési szakaszban, és mivel a lefele haladó vonat tempója jelentősen megnövekszik, így oldalanként 6-6 db 2x1-es lapos brick-et tettem a külső pillér lábakhoz, az elsőt a 8x2-es lapos bricket megelőző sín toldáshoz, aztán sorban a maradék 5 db-ot, így az ív minimálisan befelé dől. Az eredmény elfogadható vonat áthaladást hozott, ezért ez a feladat sikeresen megoldódott!
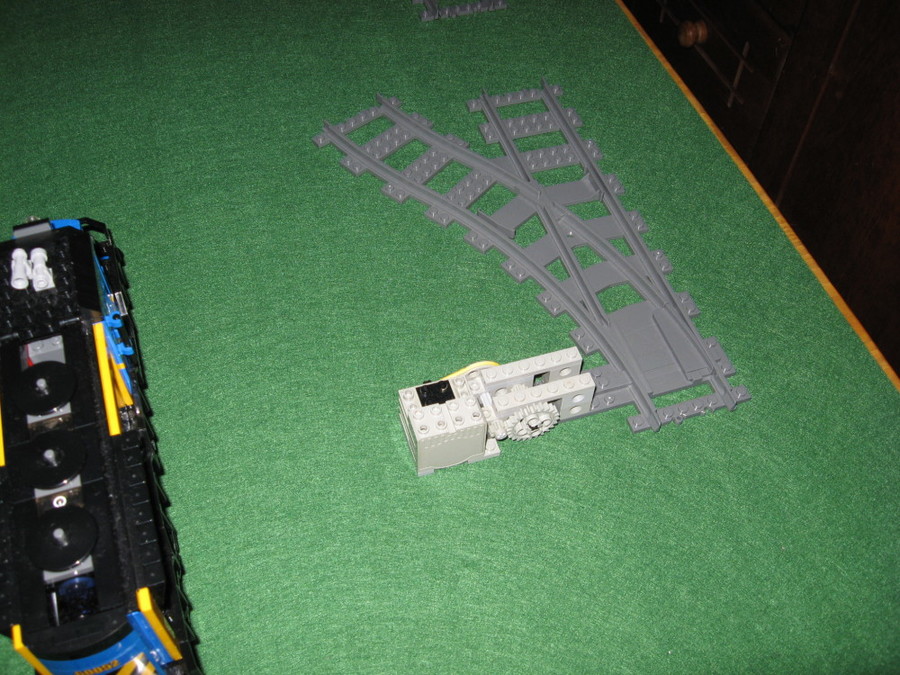
Nemrég keresgéltem a vasuti váltók motorizálásának / távvezérlésének lehetőségét, a fellelt anyagokból kialakult a saját változatom, ami egészen üzembiztos lett, hát akkor tegyünk be ebbe a pályába egy váltópárt is, mit veszíthetünk:
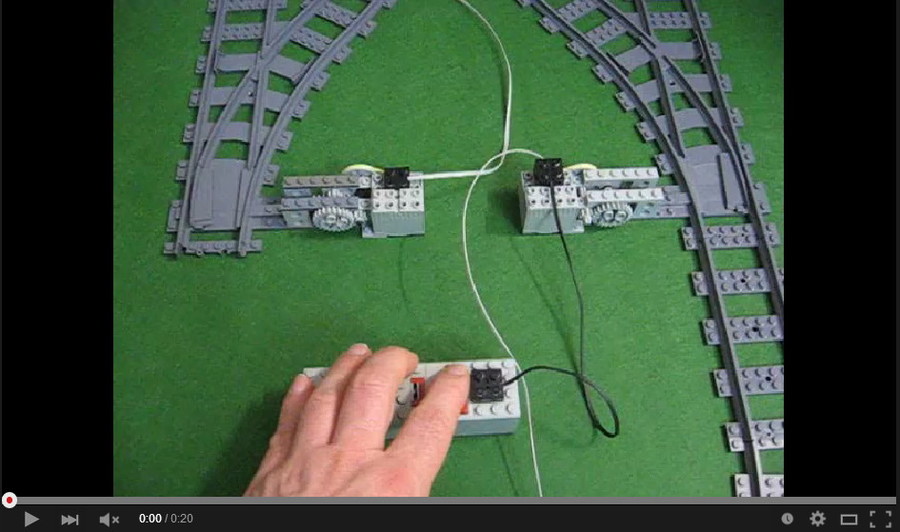
Így működnek párban a motorizált váltók
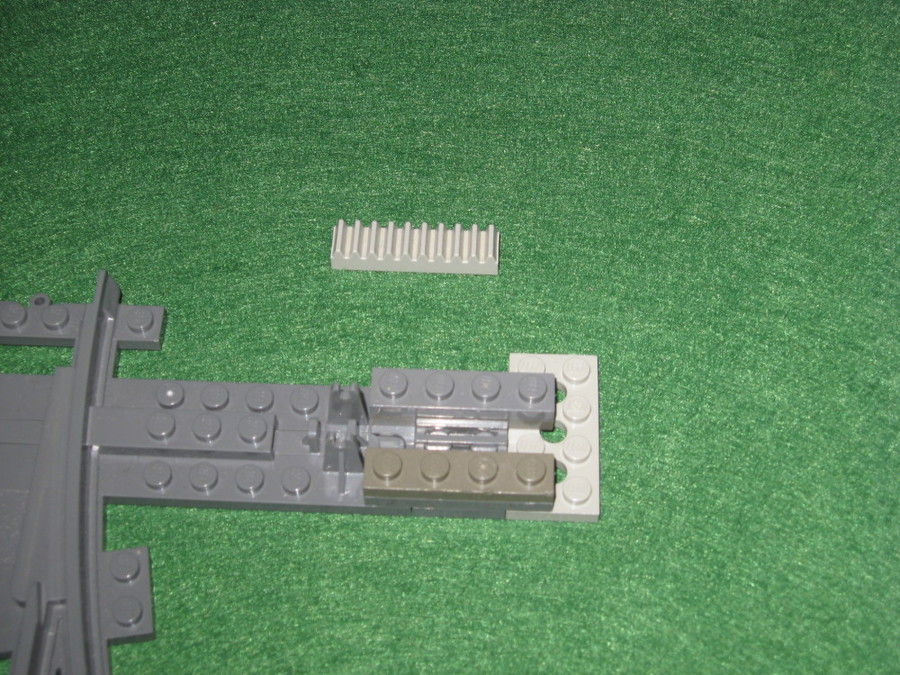
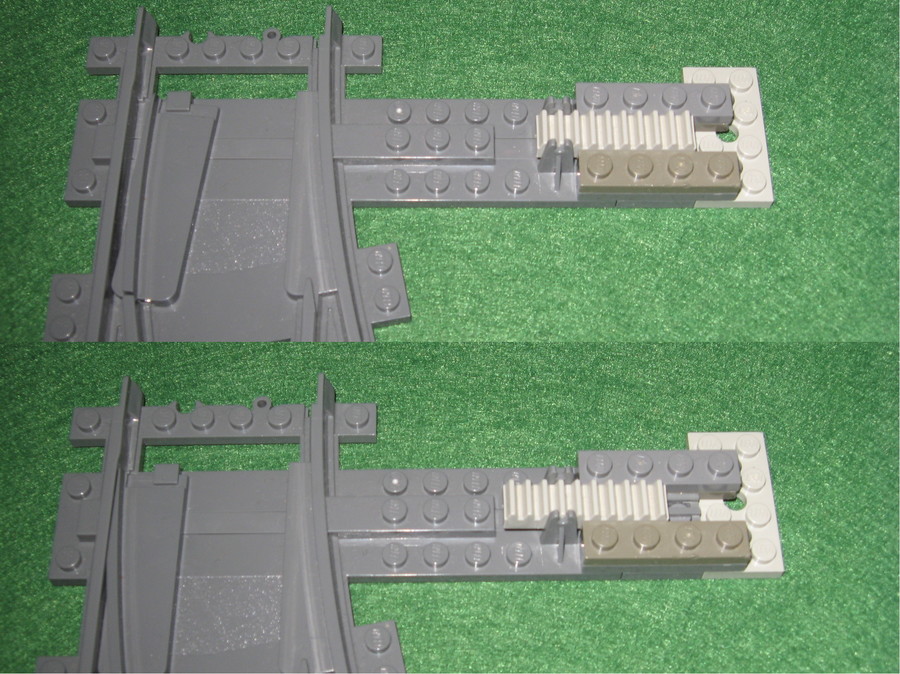
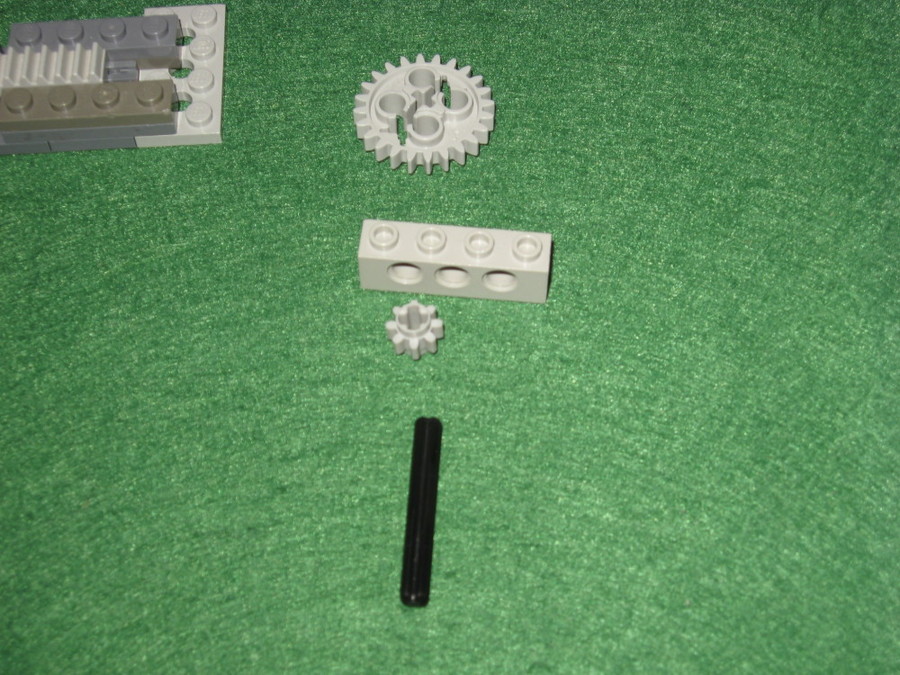
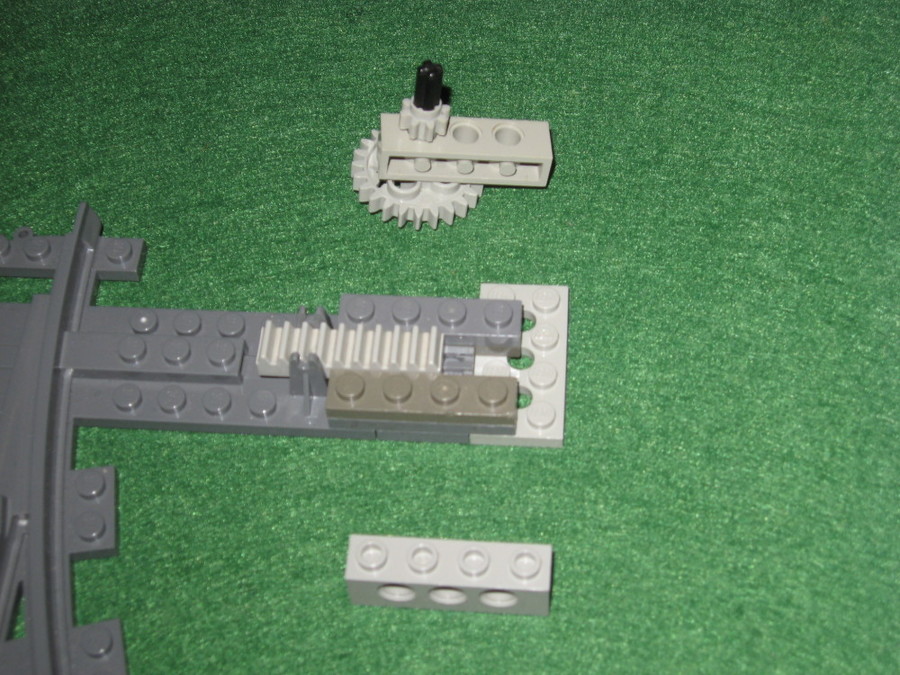
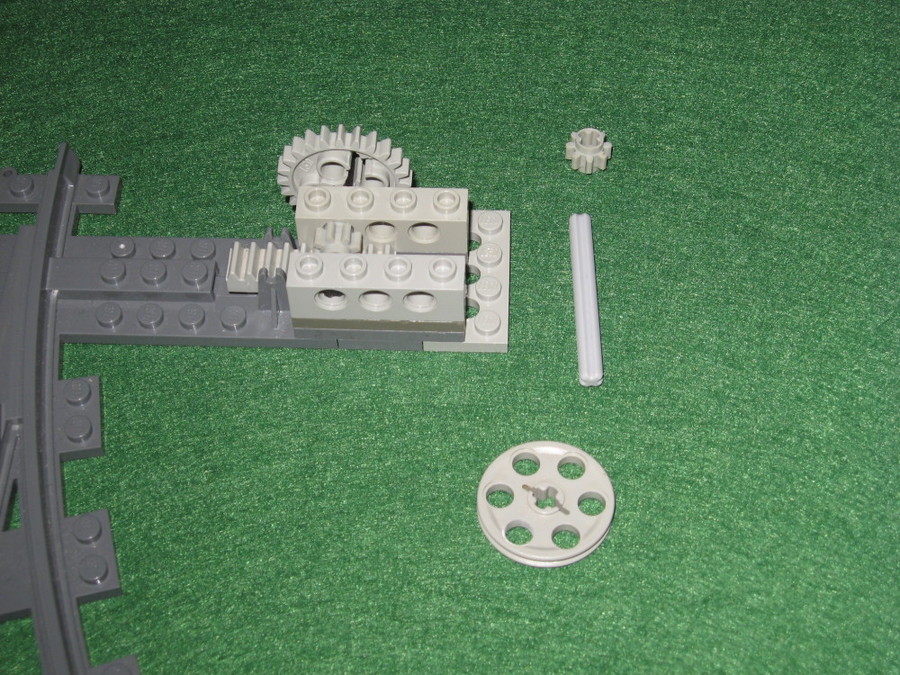
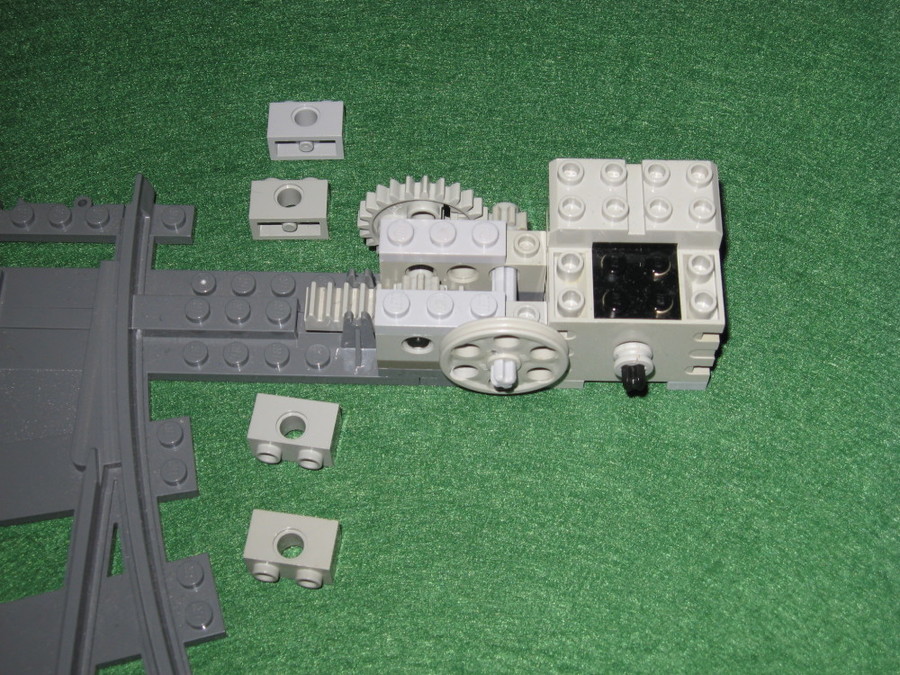
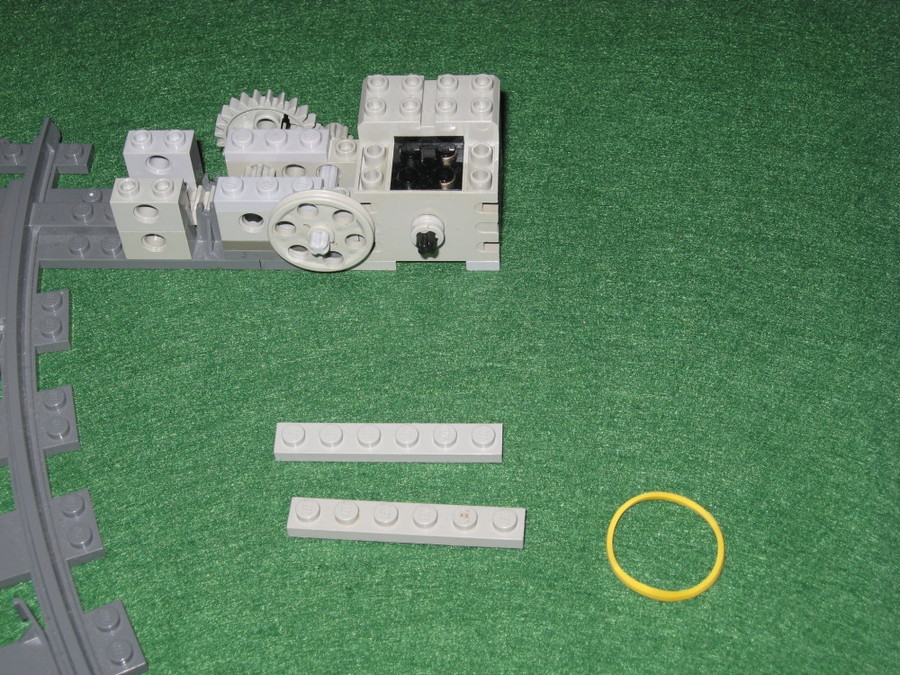
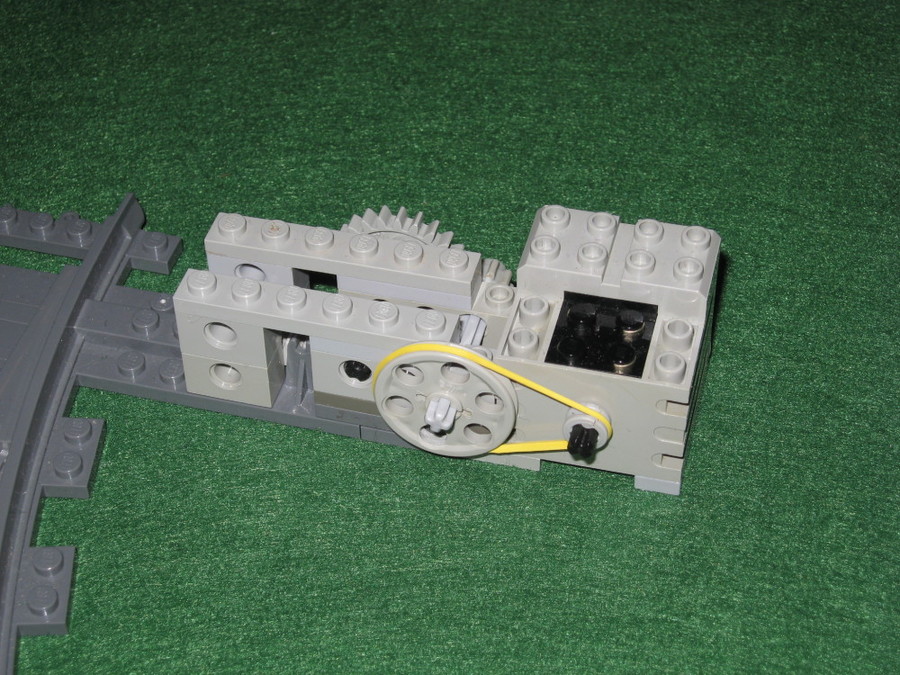
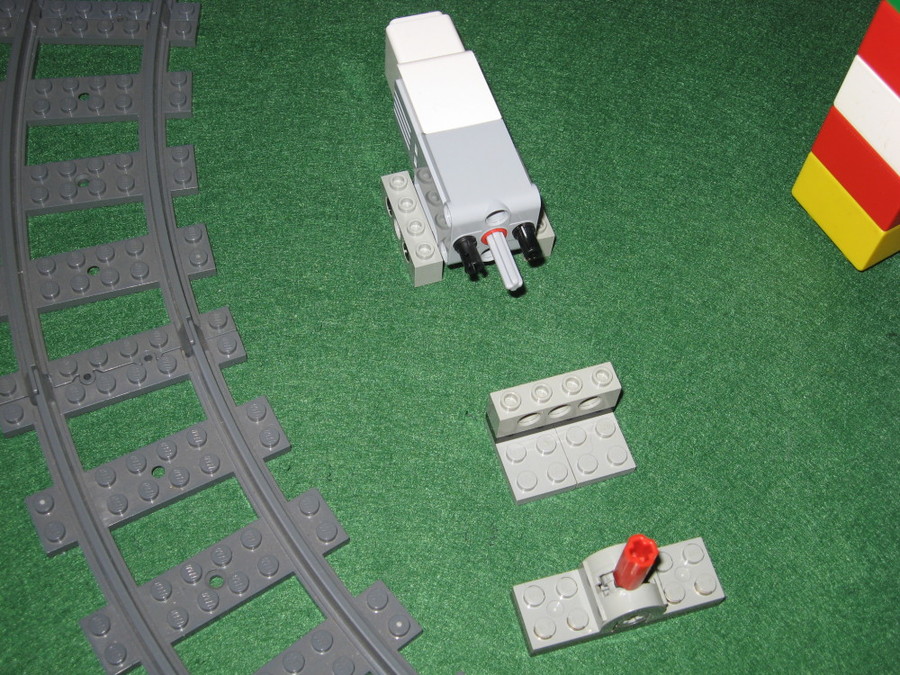
A váltók meghajtásához 1-1 darab 43362-es Technic motort használtam, ami eleve rendelkezik belső lassító áttétellel, ezt lassítottam tovább 2 fokozatban, majd egy fogaslécet mozgatva történik meg a hossz irányú váltó mozgatás. A motorról szíj hajtással viszem át a nyomatékot, hogy a végállásba érkezve az el tudjon csúszni - ami meg is történik szépen - így nem törik és nem esik szét semmi, ha a gombot tovább nyomjuk, mint szükséges lenne. A tecnic kínálatában létezik egy 60c01 számú alkatrész, ami egy nyomaték határoló fogaskerék, belső kuplunggal, ezt két okból mellőztem: az egyik, hogy csak 1 db-om van belőle, a másik, hogy a motort nem lehetne ilyen ideálisan elhelyezni, ahogy a gumi szíj hajtás viszont lehetővé teszi. Az említett kerékről van egy belső működést is mutató kép a motorizálás lépéseit mutató fotók között, azoknak, akiket érdekelnek a részletek! A váltók vezérlését az EV3 Medium motorjával és a 6484-es F1 Hauler 6551 számú kétállású kapcsolójával oldottam meg:
A váltók vezérlése működés közben itt!
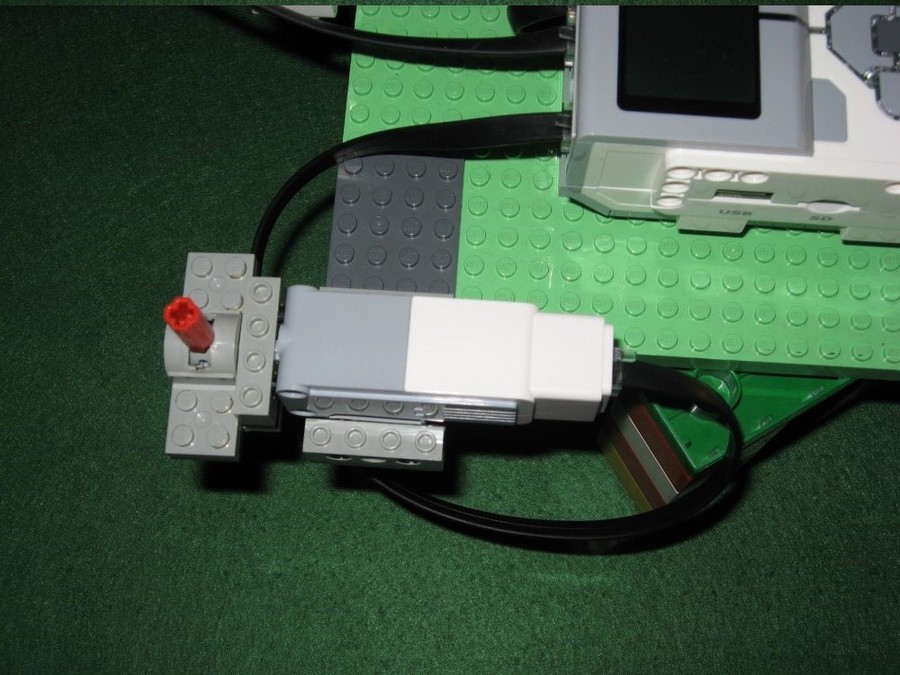
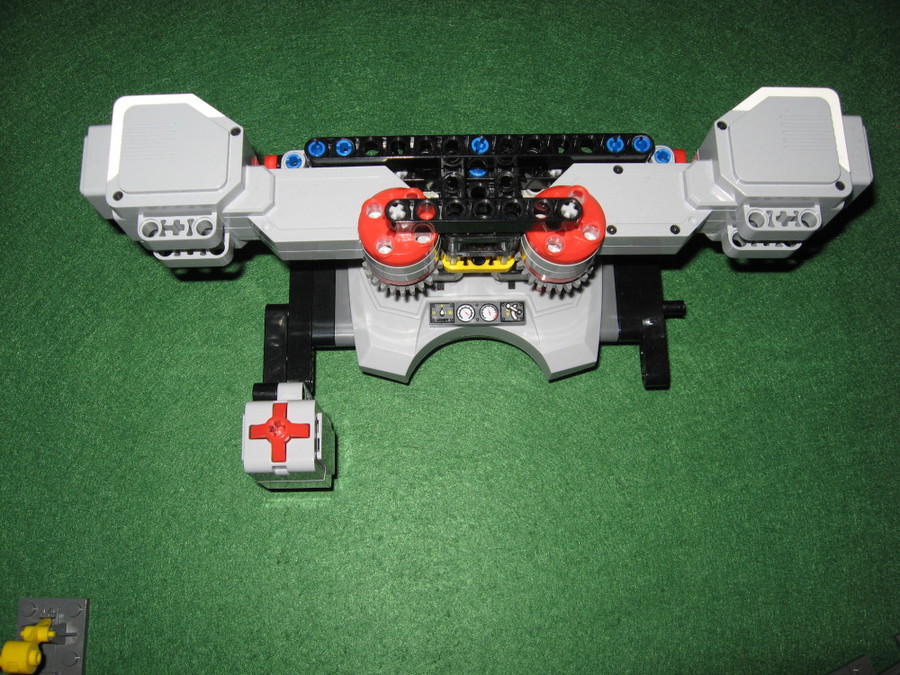
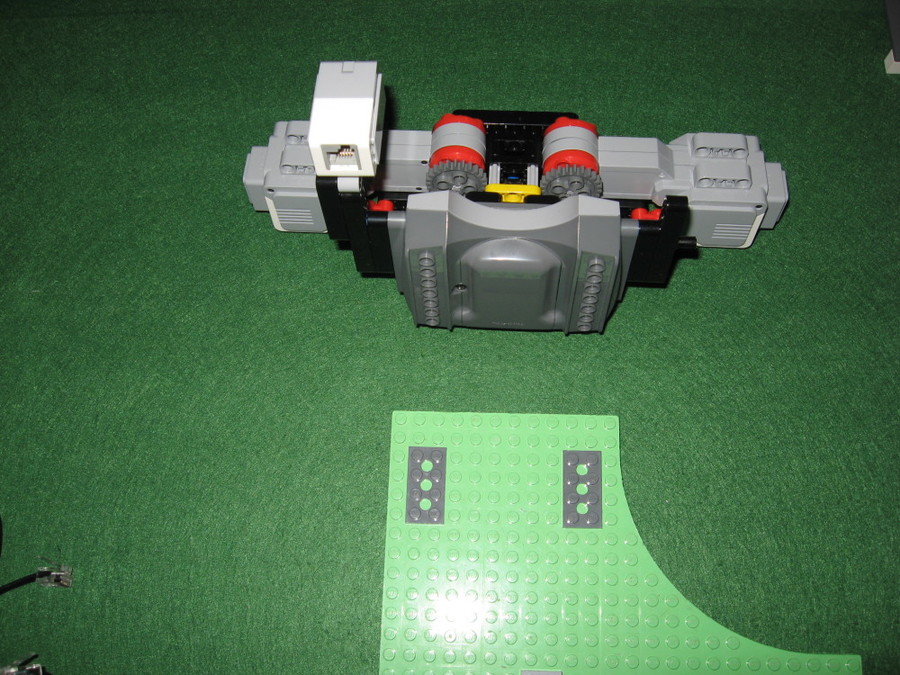
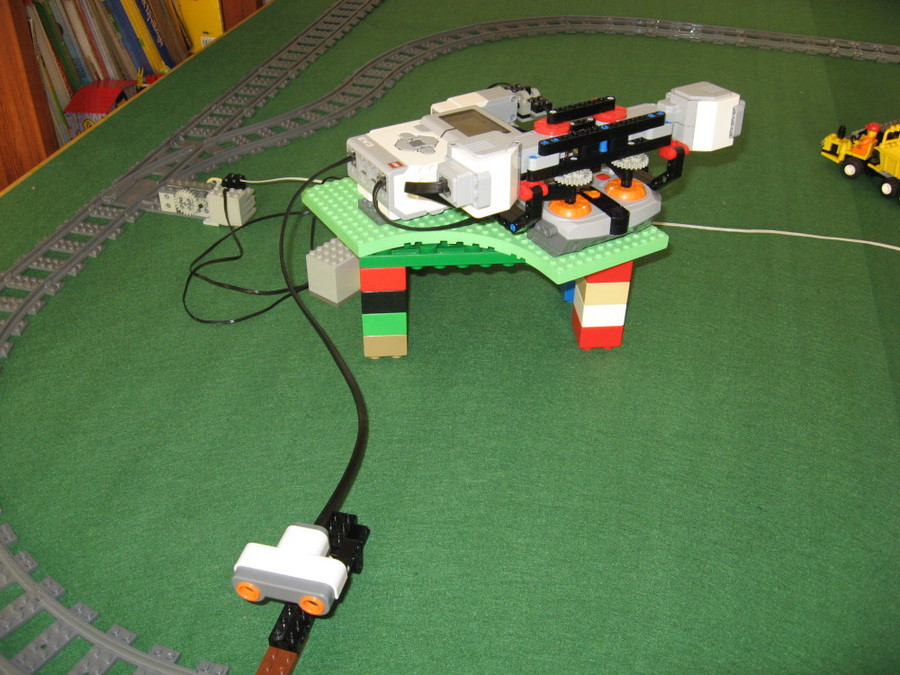
Volt egy félkész EV3 vezérlési koncepcióm is, amely 2 vonatot vezetne egy távvezérelt váltópárral ellátott páylán, nekünk egyenlőre egy vonatunk van, ezért az volt a terv, hogy egyik körben a sík szakaszon, a másik körben a felüljárós szakaszon fog közlekedni a szerelvény, az állomáson pedig várakozik kicsit, majd tovább halad. Az EV3 Brick vezérli a teljes rendszert, ezért mechanikailag össze kellett illeszteni egy forgó gombos vonat IR távvezérlőt az EV3 nagy motorjaival, ami önmagában egy délutános munka volt:
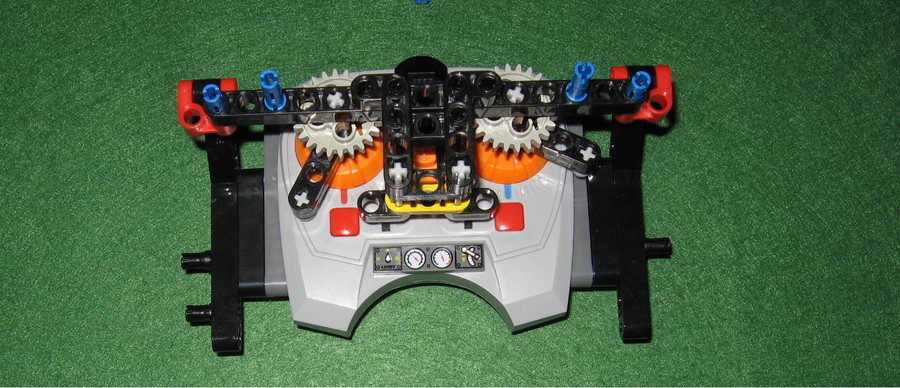
A képen látható, hogy a két kar a középső végállás ütközőnél kezdi a mozgást induláskor, és ide tér vissza leállításkor. Természetesen a rendszer elindításakor lefut egy végállás kalibráció itt, a váltó vezérlő kapcsolónál pedig egy középállás beállítás. A karok végén lévő mini gömbfej - 4211375 alkatrész - működteti a piros leállító gombot. A motorok 1:1 áttétellel mozgatják a vezérlő korongot, próbálgatás után kiderült, hogy 15 fokonként van egy-egy fokozat az elfordulás során, de sajnos a vezérlő minősége csapnivaló, nem a megszokott lego színvonal, így sokszor nem volt pontos a működése, gyakran az induláskor is eltért 1 fokozattal és a leállítás sem mindíg valósult meg, azért szép feladat volt, és úgy 95 % körül sikerült teljesítenem :-) A váltó vezérlésnél nem volt ilyen probléma, szerintem az EV3 Medium motorját eleve finom mozgásokra és nem kerék / lánctalp meghajtásra tervezték, ez már anno a célbalövős Star Wars építésnél kiderült számomra, és a 9 V-os két állású kapcsoló is jól működik + / - 50 fokos elmozdítással a középállástól, a vezérlés ezen része 100 %-os lett. Az EV3 nyógomb kézi indítást / leállítást szolgálja, az ultrahang szenzor pedig az előtte elhaladó szerelvényt teljes biztonsággal érzékelte, itt sem volt gond. A vezérlő építésének részletei a fotók között megtekinthetőek. Összességében így sikerült összehozni a teljesen automatikus vezérlést:

A rendszer önálló működés közben
Hogyan alakítsuk energiatakarékossá IR távirányítású vonatunkat
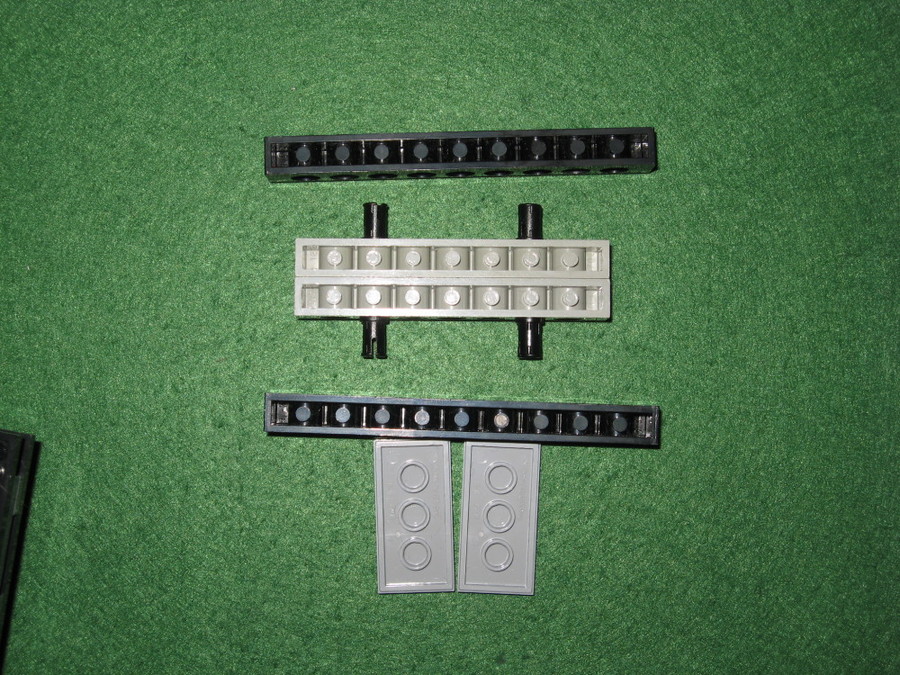
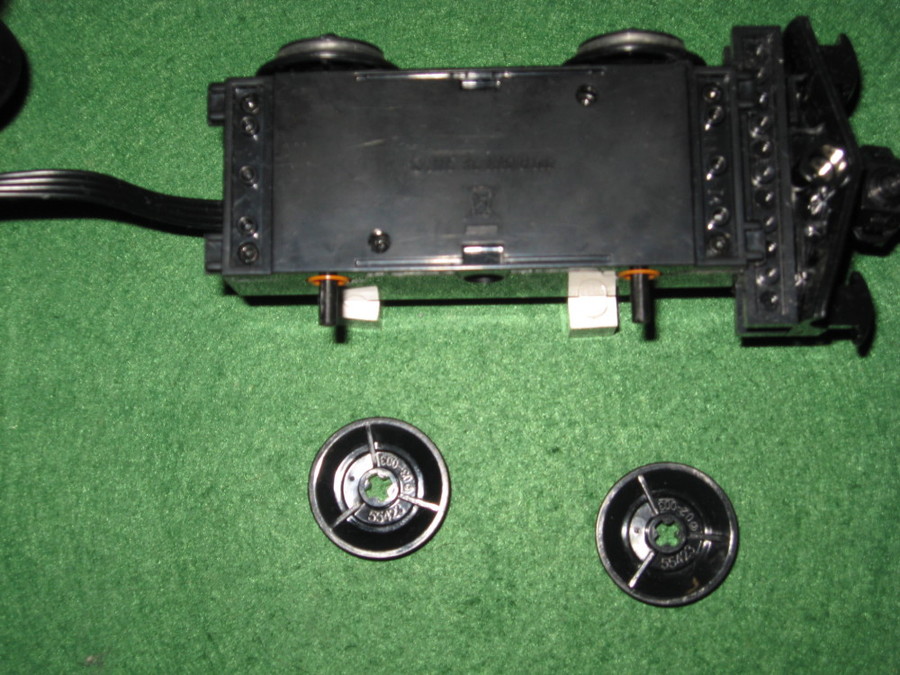
Amikor először összeraktuk a készletet és elkezdtük róni a köröket a vonattal, hamar megtapasztaltuk, hogy nagyon hamar leszívja az elemeket (Energizer, Duracell) ez a kis szerelvény. Gépészmérnökként rögtön szemügyre vettem a passzív és aktív kerékzsámolyokat, és rádöbbentem, hogy habár a LEGO a 80-as évektől alkalmazza a Technic készletekben a hajtott kerekeknél a diferenciál művet, itt viszont mintha nem lennének tisztában az íven futó járművek ezen problematikájával, nem hogy nem használnak difit, de még a passzív zsámoly tengelyei is mereven kötik össze a külső és belső íven futó kerekeket, amiknek ívmenetben jelentősen eltér a fordulatszáma. Ráadásul a sin táplálású Lego vonatok fém-fém gördülését itt felváltották kiváló tapadású, gumizott kerekekkel a passzív zsámolynál is. Nincs mit tenni, lehetőséget kell biztosítani az eltérő fordulatszámokra, különben a kanyarokban szinte beékelődő vonat energia ellátására rámegy a gatyánk is :-) A passzív zsámolyoknál teljesen szabványos megoldást találtam:

Az átalakítás részletesen a képgalériában követhető, a lényeg, hogy a 6 egység hosszú tengelyt 2-2 3 egység hosszúra cseréltem, a rugókat szimbolizáló dísz elem meggátolja a kerekek oldal irányú kicsúszását, de középre szükséges a két Technic elem, mert különben a tengelyek nagyon instabilan futnának (tengely vonaluk nem esne egybe), és akkor azért szorulnának jobban, mint ebben a megoldásban.
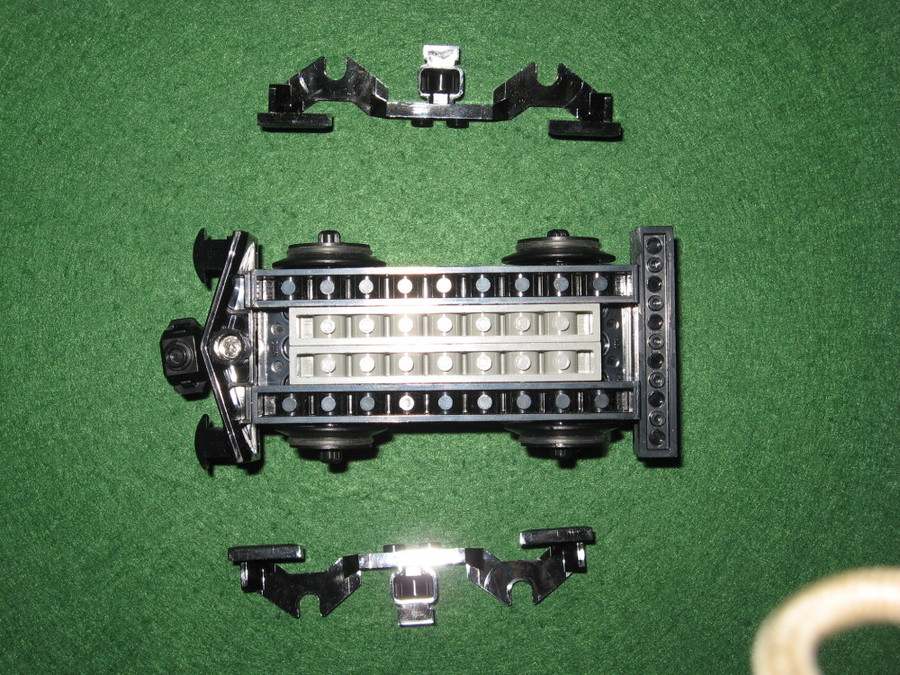
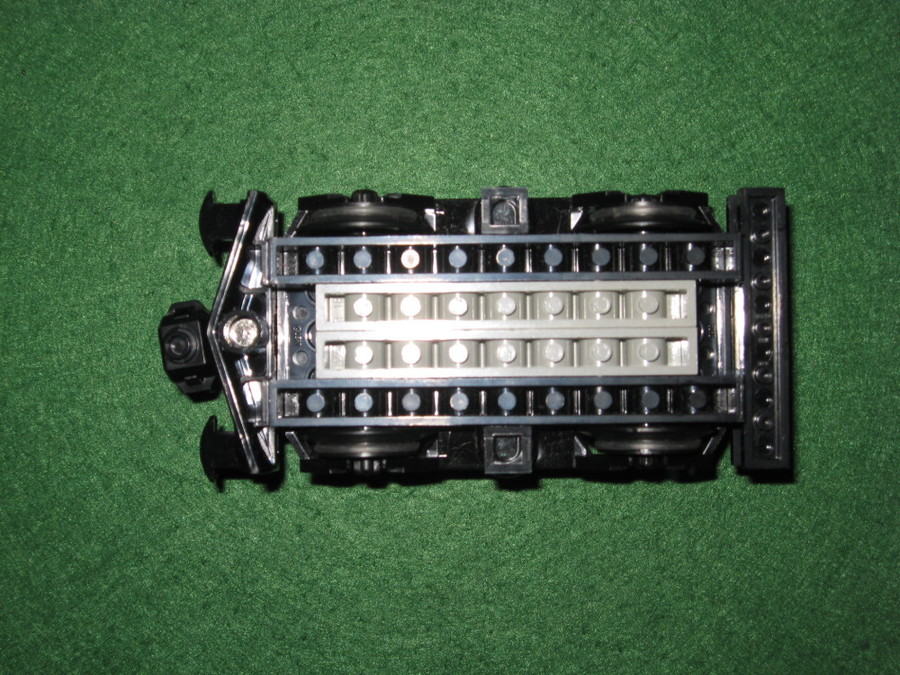
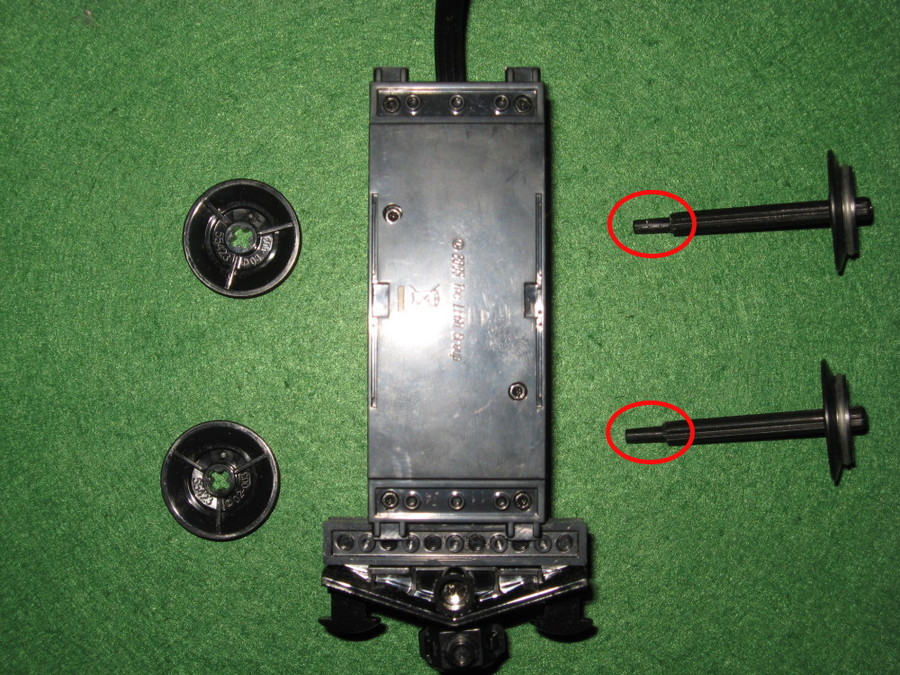
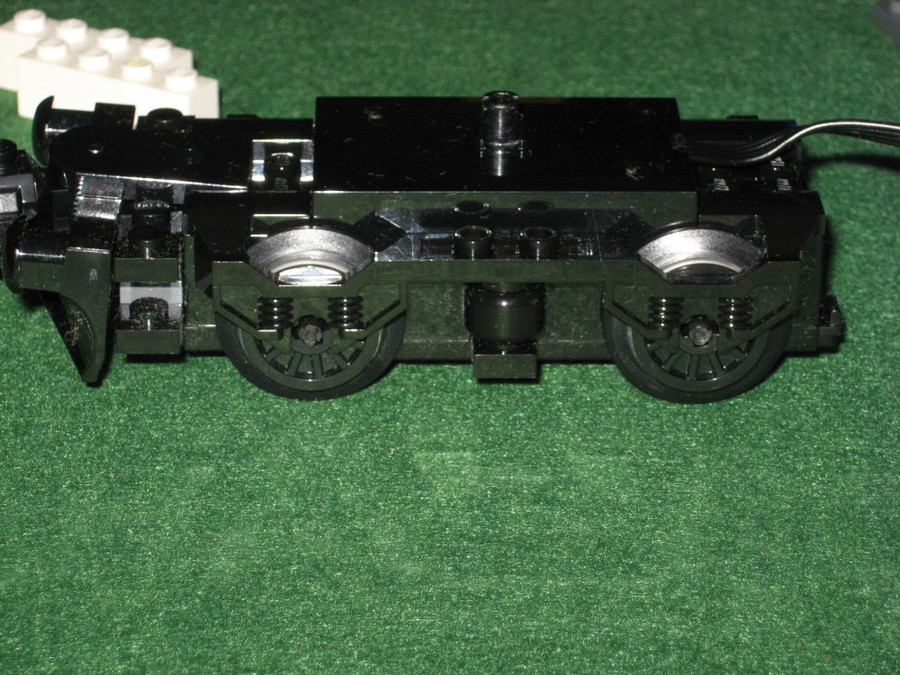
A meghajtott zsámyolynál már nem lehet ilyen szabványos megoldással élni, ott roncsolni kell ! Először a kerekekre gondoltam, de ha nem jön be a megoldás, akkor azt jóval nehezebb eredetire pótolni (drágább is), mint a tengelyeket, ezért két 6 egység hosszú tengelyről 8 mm hoszzban tűreszelővel eltávolítottam a bordákat, aztán polír papírral, a tengelyt fúrótokmányba fogva összecsiszoltam a felületet:

Ezek alkalmazásával csak 2 kerék lesz hajtott, de sík pálya esetén ez is elegendő. Két fontos dolog van: a lemunkált végeknek egy oldalra kell esniük, és lehetőleg a külső íven fussanak a hajtott kerekek, tehát a megmunkálás belső oldalra essen, így vállt be a dolog. Idő közben átálltunk AAA tölthető, 800 mAh-s NiMH akkukra, amik kiválóan működnek a vonatban (AA méretben, 2100 mAh kapacitással az EV3 Brickben is) és szerintem érezhetőan javította a futásidőt ez a módosítás. Az új vagonoknál nincs probléma, mert ugyan összerakáskor a fém tengelyek és a műanyag kerekek illesztése szorosnak tűnik, pár óra játék után a kerekek könnyedén elfordulnak a tengelyeken. A régebbi vagonok kerekeinek furatát egy 2 mm átmérőjű fúrószárral meg kellett "dörzsárazni", azaz kézzel átjártni rajta a fúrót (fúrószárat fogóval megfogni és a kereket kézzel rátekerni, megmozgatni majd lehúzni), mert egyébként nagyon szorosak voltak. A megoldás alkalmazása után is érzékelhető minimális lassulás a kanyarokban, de az energiazabálás jóval kisebb mértékű, ezt a könnyen elvégezhető, nem túl barbár átalakítást mindenkinek ajánlom !
Ezen az asztalon a meghajtó tengelyeket vissza kellett cserélnem normálisakra, mert az emelkedőn a 2 kerék hajtás nem bizonyult elegendőnek.
2015.02.15.
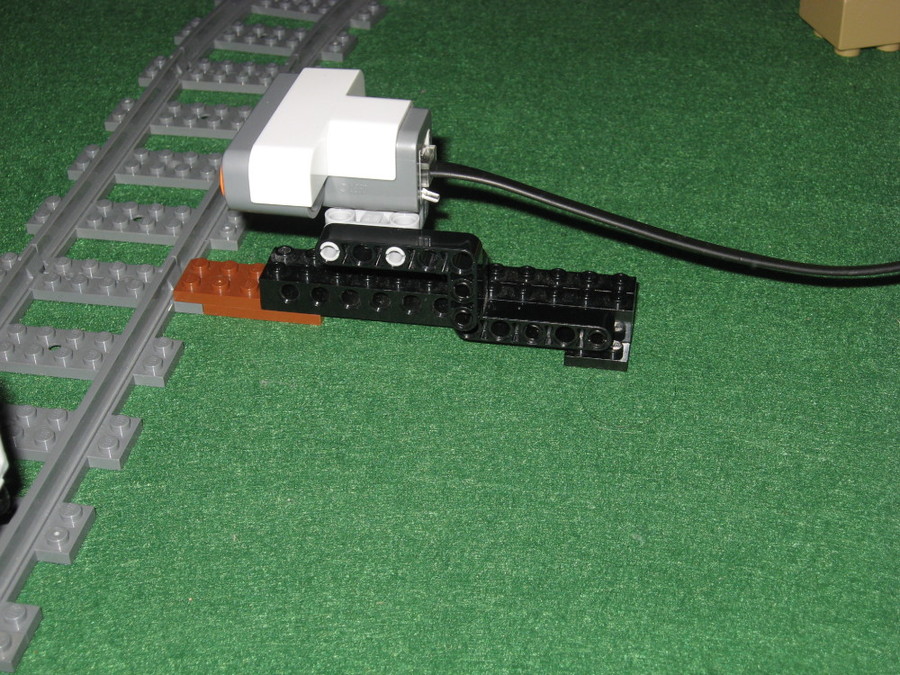
Kiegészítésképpen szeretném itt még bemutatni, hogy miként oldottuk meg a vagonok leakasztását, mert ugye ha már minden távirányítású, akkor a vagonokat se kelljen kézzel akasztgatni!
Az EV3 Brick-et lefokoztuk váltó kezelőnek, és átvettük tőle a vonat irányítását, azért a játék az játék ! A tolató vágány váltóját is motorizáltam, rátettünk egy infrás vevőt, innentől már szinte hiányzott, hogy a vagonok leakasztását valami távvezérelt mechanzmus végezze, hát ez lett a megoldás:
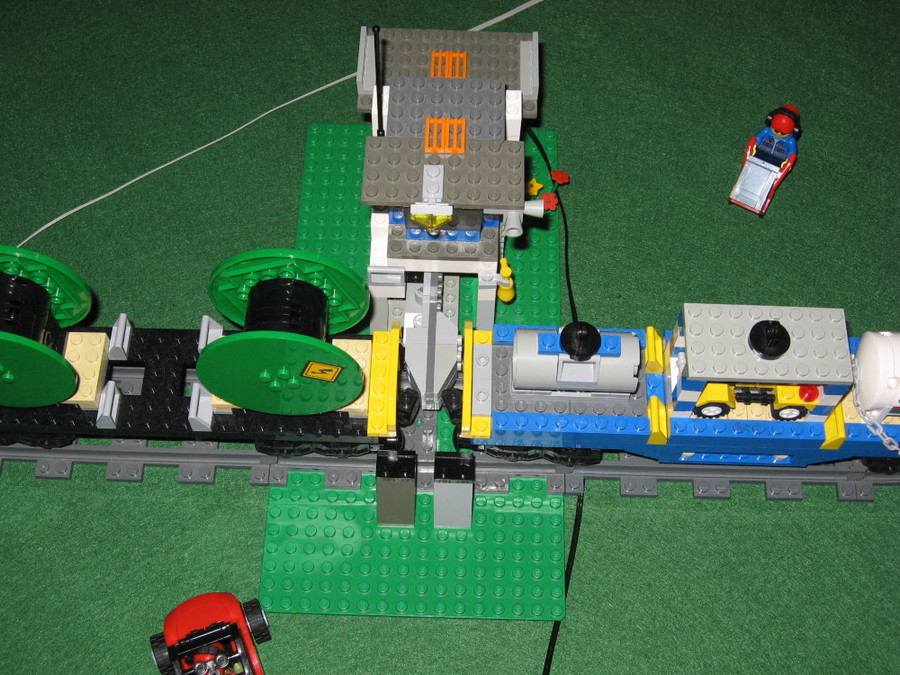
Először egy két oldalról összenyomódó ékpár volt az elképzelés, de a sinen nagyon sokat kellett volna emelni, hogy a mechanika át tudjon férni alatta, ezt elvetettem. Az ütközők közé oldalról benyomódó ék jó gondolatnak bizonyult, ezért az megmaradt, viszot ellen oldalon csak egy ütköző támasztó került megépítésre. Ez a megoldás is működőképes, igaz szigorú szelvény elvárásokat támaszt (nem lóghat ki semmi avonat oldalán), de ez a valóságban is így van, hát tartjuk magunkat hozzá! A meghajtáshoz egy belső áttétel nélküli, régi 9 V-os Lego motort alkalmaztam csigakerék lassítással és gumiszíj kuplungoással. A távvezérlést az asztal szélén elhelyezett elemtartóról lehet megoldani, mivel az ütközők pozícióját figyelni kell, ezért ez nem jelent kényelmetlen kötöttséget. A megoldás működik, fogok építeni még egyet, motorizálok még egy váltót és akkor a szerelvény rendszés már sima ügy lesz kézi beavatkozás nélkül ! A videon látható nehézkes pozicionálás nem általános, szerintem pillanatnyi zavaromban bénáztam ennyit, mert felvétel rögzítés nélkül ennél mindíg gyorsabban ment :-)

Klikk a képre a működés megtekintéséhez!
Elkészült a második szerelvény szétkapcsoló is, és a vágányához tartozó váltót is sikerült motorizálnom, így teljesen távirányítással lehet bármilyen szerelvény változatot rendezni, ez így már nagy élmény:
Itt már puritánabb külső jött csak össze, de a mihamarabbi kipróbálás miatt kicsit siettem is :-) A külsőt majd még csiszolgatjuk, egyenlőre így is megfelel. A végleges pálya ilyen:

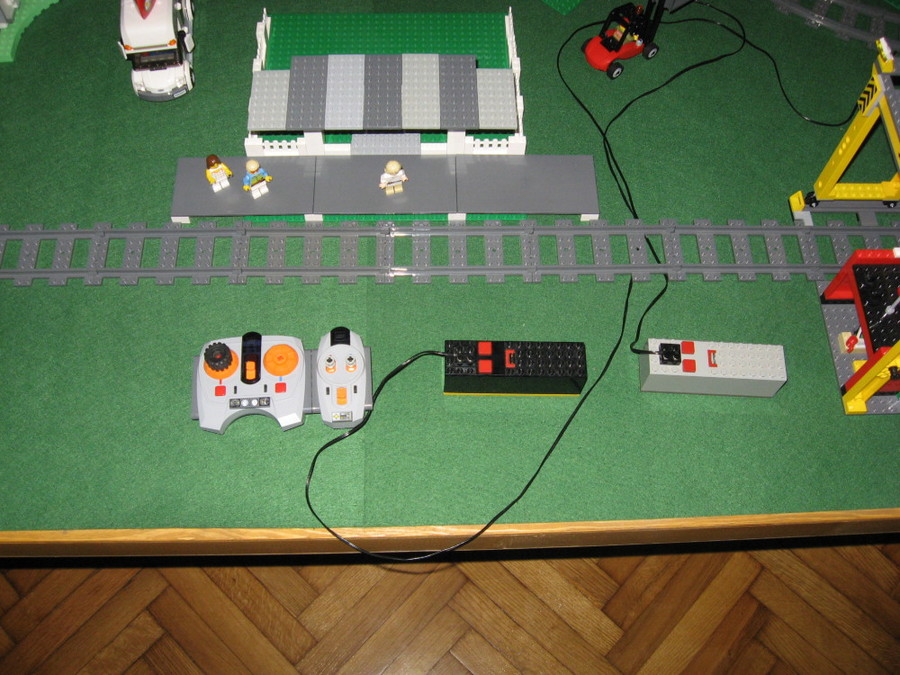
Az irányító központ:
Az automatizáláshoz szükséges lego összetevők felsorolása:
- 4 db váltó állító belső áttételezett 9V-os régebbi Technic motor
- 2 db szétakasztást működtető, áttétel nélküli régebbi Technic motor
- 3 db 6 - 1,5 V-os AA elemes régi Technic, irányváltós elem modul (1 az EV3 váltó vezérlésnél)
- 1 db IR 2 csatornás vevő a rendező vágányok váltóihoz
- 1 db 6 - 1,5 V-os AA elemes PF elemtartó
- kb 7 db 9 V-os régebbi Technic kábel
- 2 db PF konverter kábel
- 1 db iráynváltó kapcsoló az EV3 váltó vezérléséhez
- 1 db EV 3 Medium Motor a váltó vezérléshez
- 1 db EV3 Brick
- 1 db EV3 Ultrahang szenzor a vonat áthaladás érzékeléséhez
- 4 db 9 V-os régebbi kis 1-es villogó izzó a váltóknál
- 2 db 9 V-os régebbi kis 2-es villogó izzó a kocsi szétakasztóknál
- 1 db PF kis távirányító
- 1 db PF tárcsás vonat távirányító
A kocsi szétakasztók elemes vezérlését kicserélem még egy Technic Control Center II-esre, mert annak van hálózati megtáplálási lehetősége, az egy kicsit könnyít az üzemeltethetőségen, és akkor talán eljutunk a késznek nevezhető állapotba!

Technic Control Center II
Össze kellett kaparni mindent, de végül csakk összejött ! Egy SBrick esetleg tudna egyszerűsíteni a dolgon, de ez még a jövőbeni tervek része :-) Azért nem volna gyenge táblagépről vezérelni ezt a rendszert...na de maradjunk a jelenben...
2015.02.24.
A 7900-ból átvett híd A pálya építésének lépései
A pálya építésének lépései










 A végleges pályaAz emelkedők
A végleges pályaAz emelkedők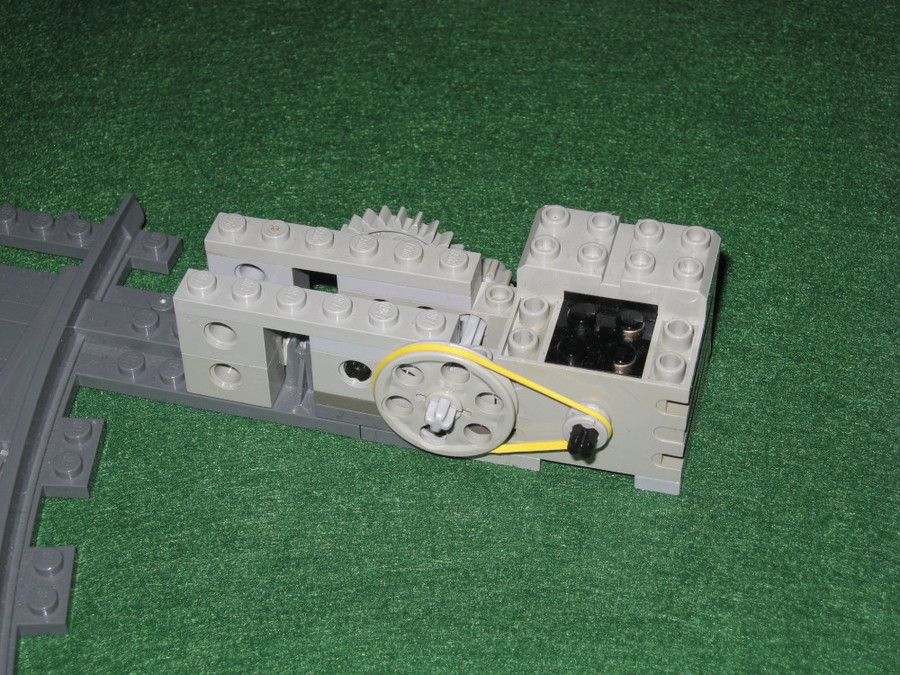 Váltó motorizálása
Váltó motorizálása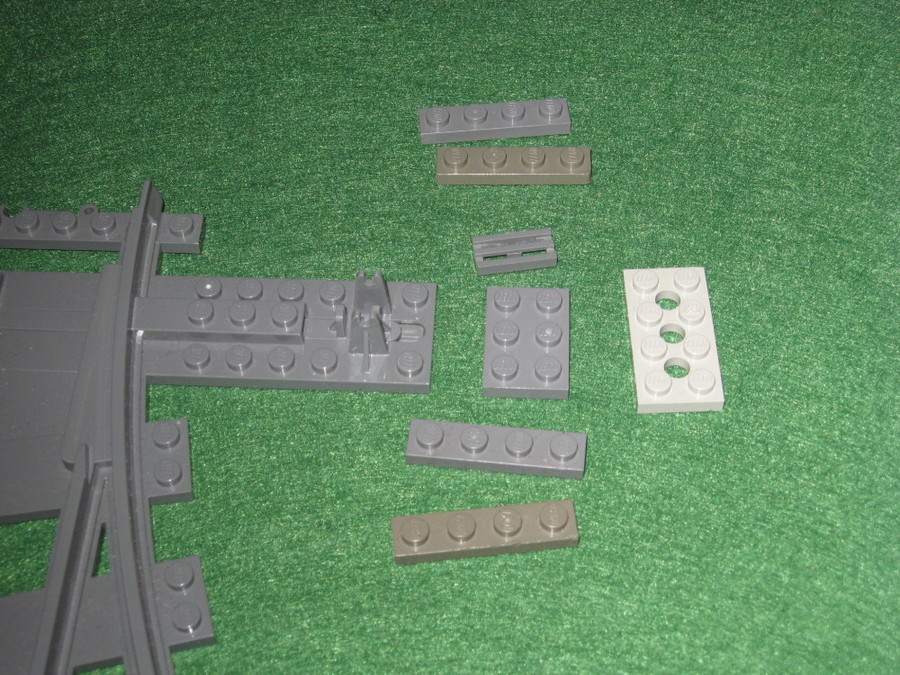

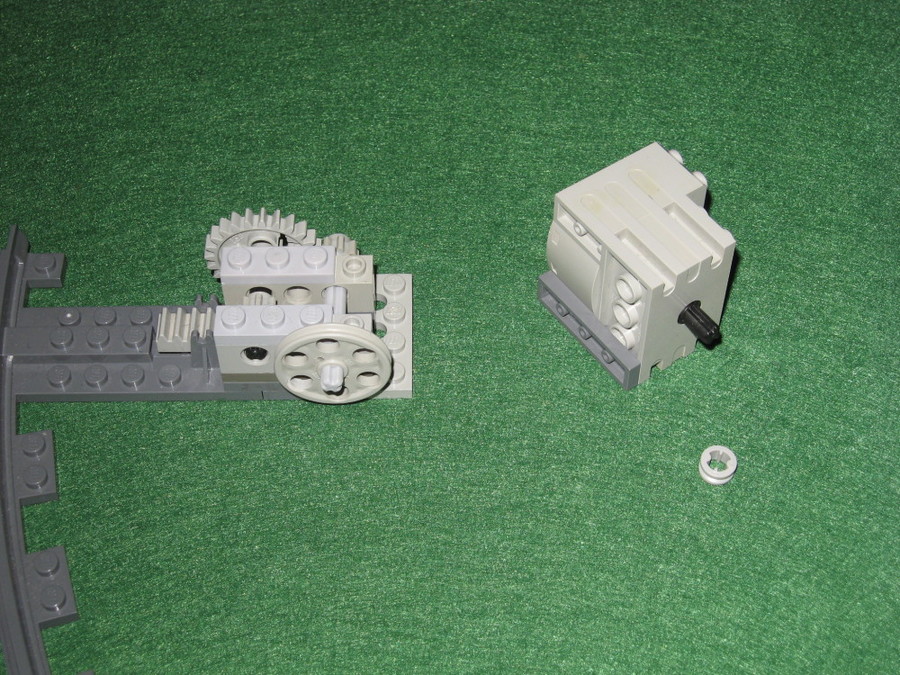
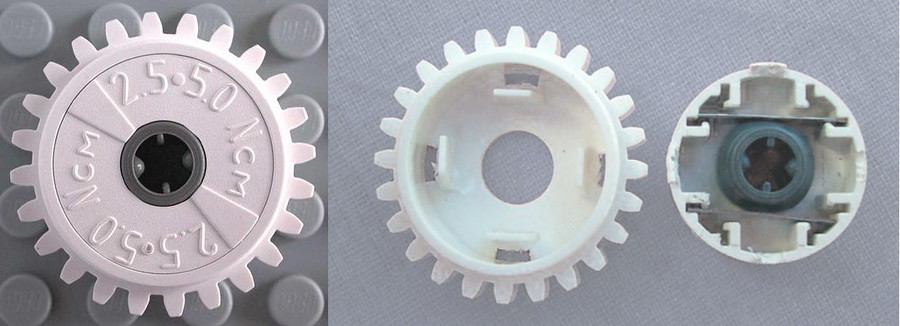 A 60c01 típusú nyomaték határoló és működéseKözben az asztal is elkészült!
A 60c01 típusú nyomaték határoló és működéseKözben az asztal is elkészült!
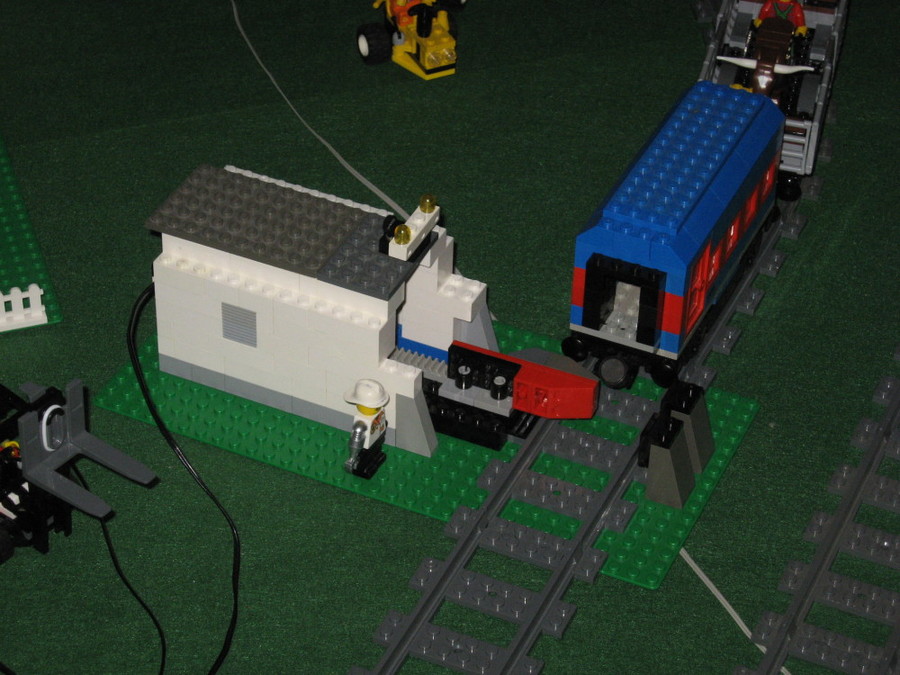
 A gyorsan összerakott állomás
A gyorsan összerakott állomás A vezérlő építése
A vezérlő építése

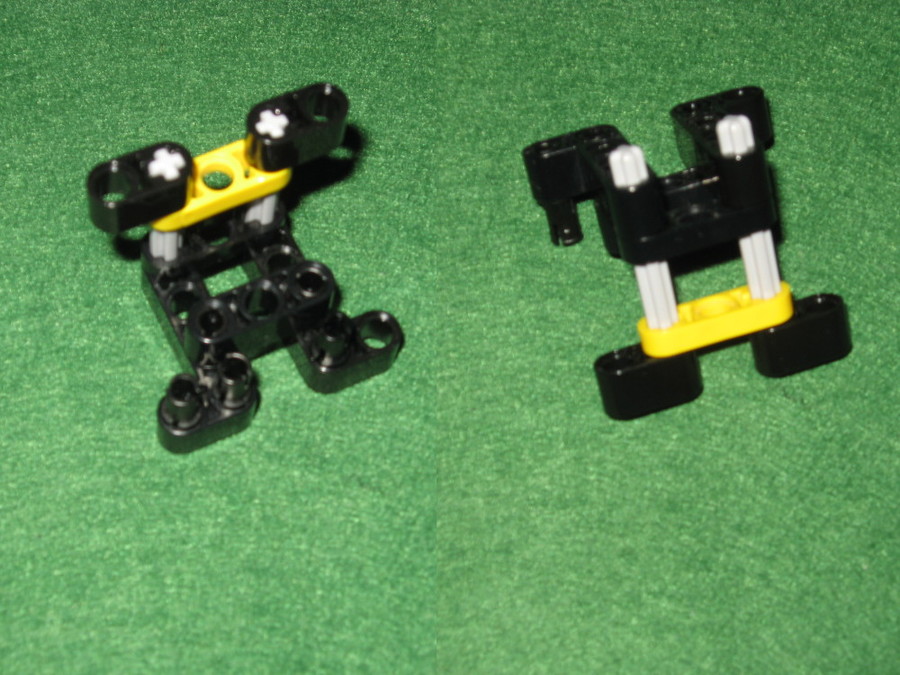 Végállás ütköző két nézetből
Végállás ütköző két nézetből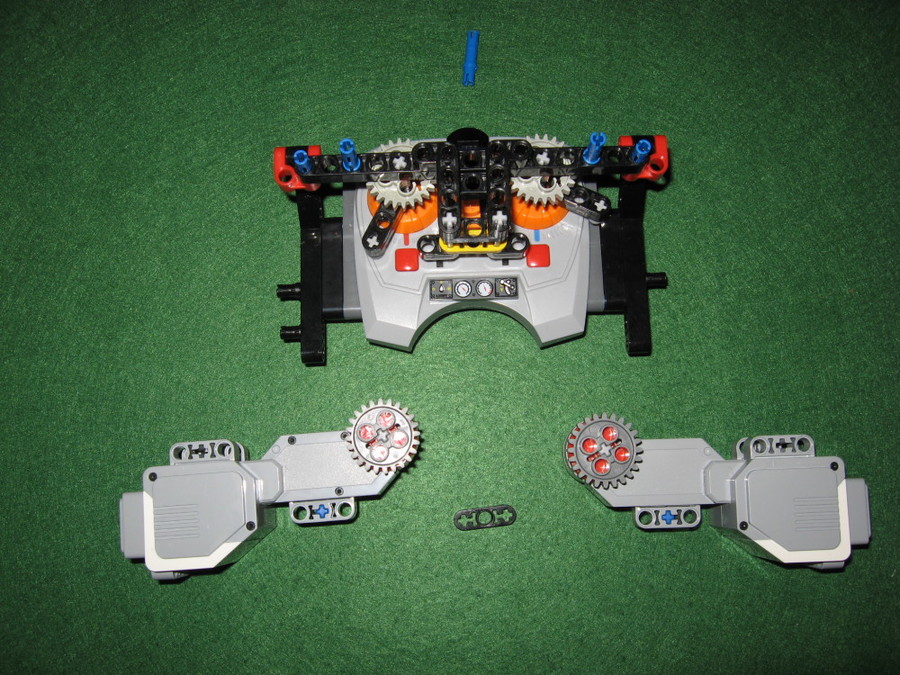
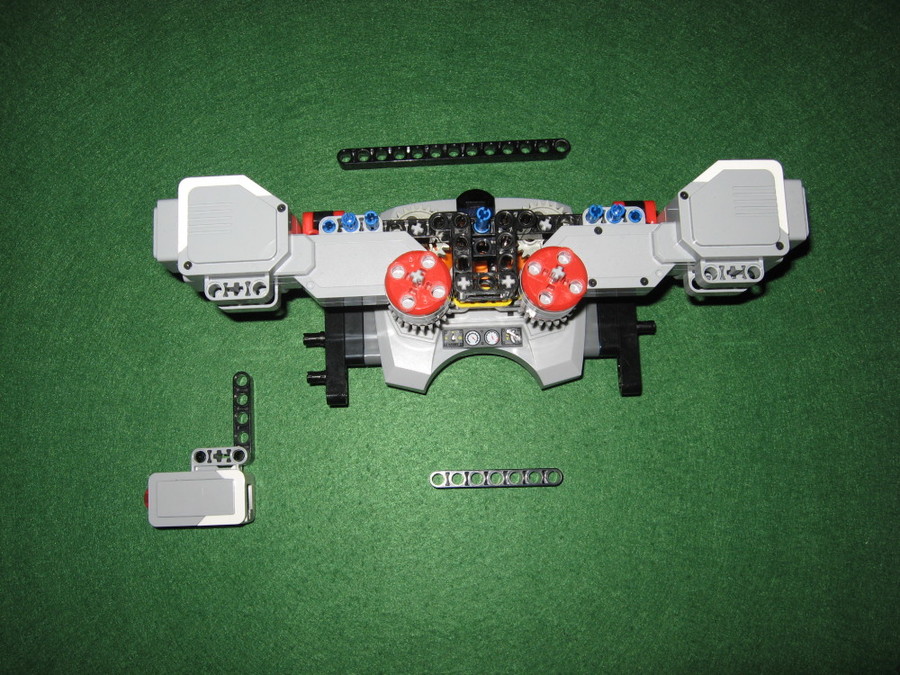
 A váltó vezérlés építése
A váltó vezérlés építése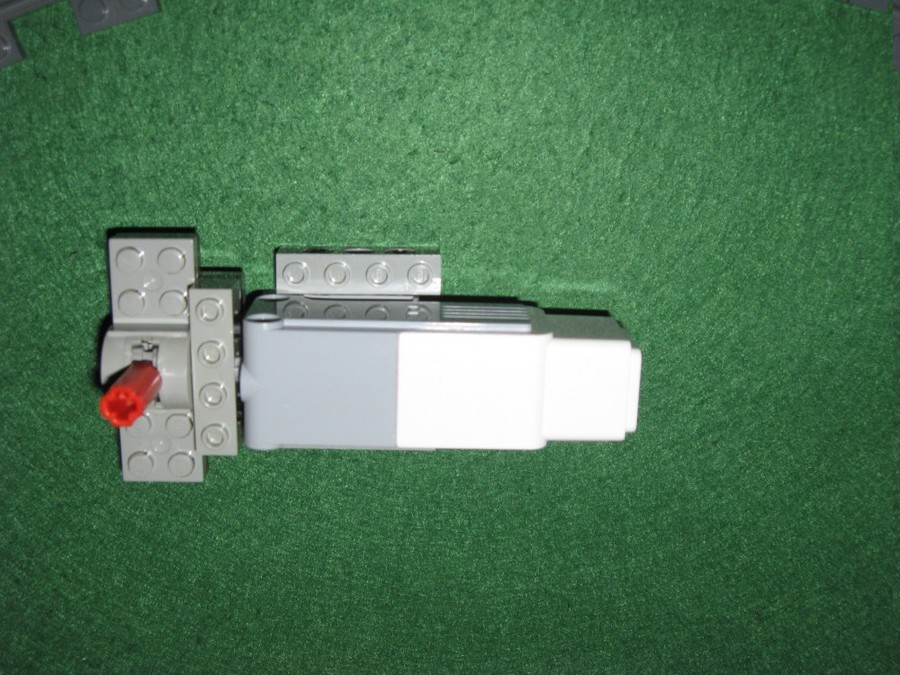

 A komplett vezérlőrendszerA végállás ütközők és a mozgató mechanika
A komplett vezérlőrendszerA végállás ütközők és a mozgató mechanika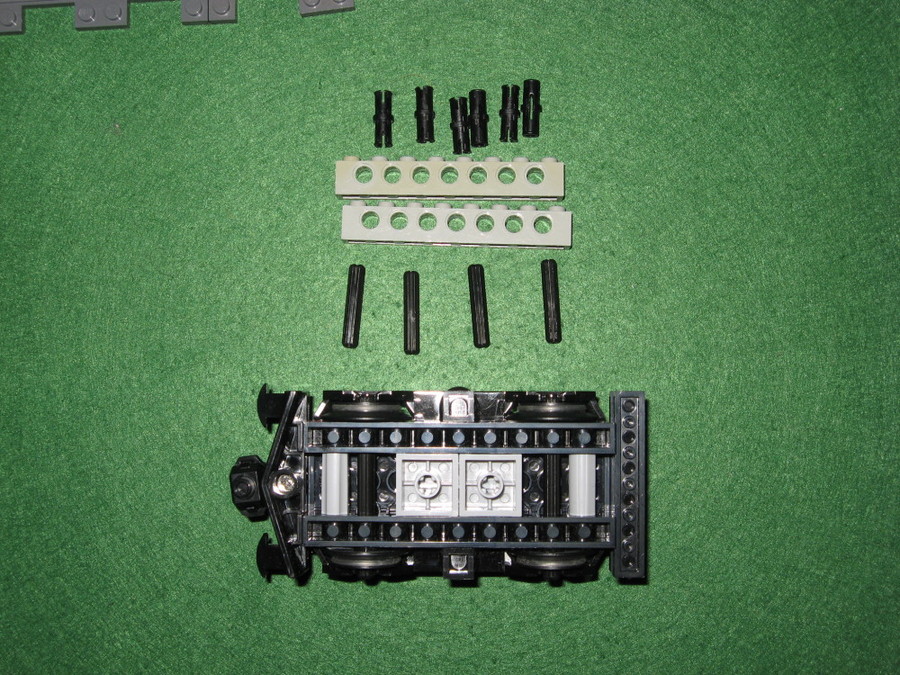 Energiatakarékos passzív kerékzsámoly
Energiatakarékos passzív kerékzsámoly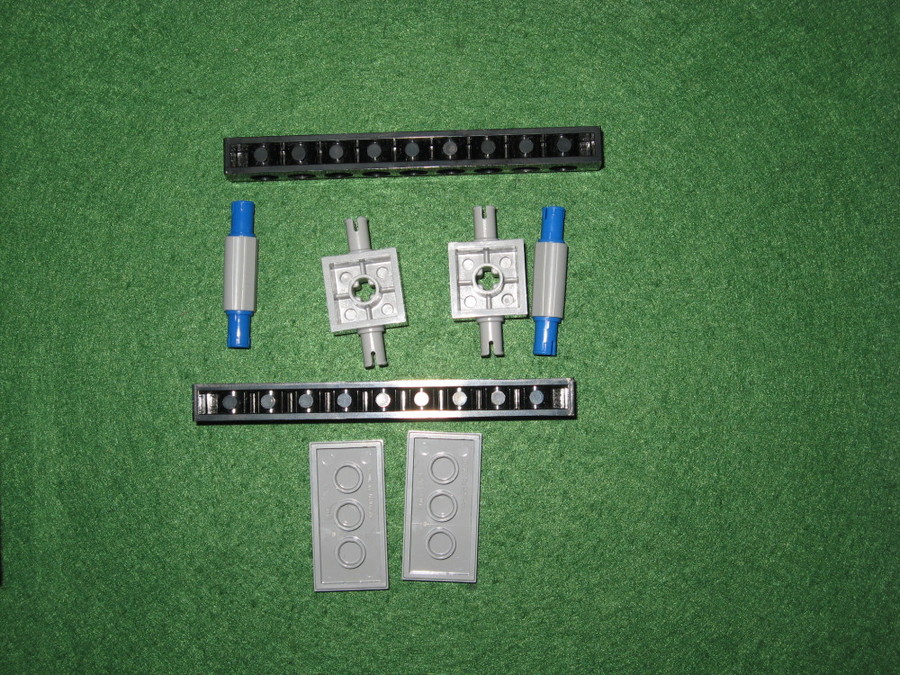


 1 oldalt hajtó 6 egység hosszú tengelyek
1 oldalt hajtó 6 egység hosszú tengelyek Energiatakarékos motoros kerékzsámoly
Energiatakarékos motoros kerékzsámoly




 Minden váltó motorizált, távvezérelhető és elkészült a motoros vonat szétakasztó is!A végleges pálya
Minden váltó motorizált, távvezérelhető és elkészült a motoros vonat szétakasztó is!A végleges pálya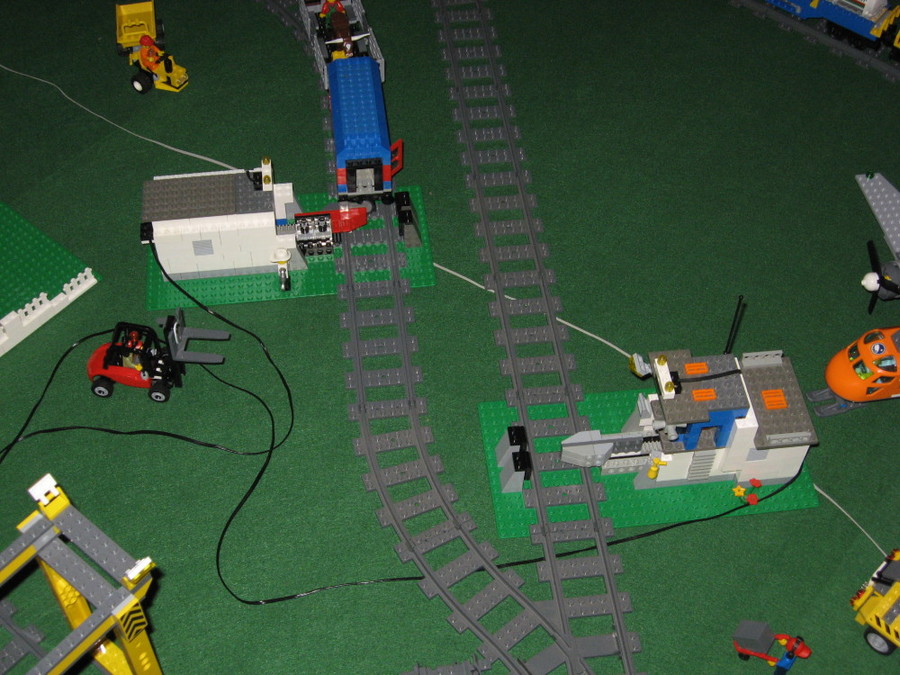 A vezérlő központ!A második szerelvény szétkapcsoló
A vezérlő központ!A második szerelvény szétkapcsoló A rendező pályaudvarTechnic Control Center II.
A rendező pályaudvarTechnic Control Center II. Asztal építés: fedlapra keret ragasztása
Asztal építés: fedlapra keret ragasztása Körbe, mind a négyet súlyozással
Körbe, mind a négyet súlyozással Csavaros rögzítést is kapnak a merevítők
Csavaros rögzítést is kapnak a merevítők A hátlap már csak csavarozva van
A hátlap már csak csavarozva van 2,45 x 1,75 m-es lenyitható asztal
2,45 x 1,75 m-es lenyitható asztal Ilyen, amikor nem használjuk, a 2 támasztó láb lecsavarozható
Ilyen, amikor nem használjuk, a 2 támasztó láb lecsavarozható 2015 február 15, 22:07
- 2016 LEGO Újdonságok
- 2017 LEGO® Újdonságok
- 2018 LEGO® Újdonságok
- 2019 LEGO® Újdonságok
- 2020 LEGO® Újdonságok
- 2021 LEGO® Újdonságok
- 2022 LEGO® Újdonságok
- 2023 LEGO® Újdonságok
- 2024 LEGO® Újdonságok
- 60. évfordulós készletek
- Angry Birds
- Animal Crossing™
- Architecture
- Art
- Atlantis
- Avatar
- Bionicle
- Brick Sketches™
- BrickHeadz
- Chima
- City
- Classic
- Creator 3-in-1
- Creator Expert
- DC
- Disney Princess™
- Disney™
- DOTS
- DREAMZzz™
- DUPLO®
- Elves
- Fortnite™
- Friends
- Gabby babaháza
- Ghostbusters™
- Gyűrűk Ura
- Harry Potter™
- Hidden Side
- ICONS
- Ideas - CUUSOO
- Indiana Jones
- Juniors
- Jurassic World
- Kaland - LEGO Movie
- Karib tenger kalózai
- Kastély, LEGO Vár (Kingdoms)
- Large Models
- Lone Ranger
- Marvel
- MINDSTORMS®
- Minecraft™
- Minions®
- Mixels
- Monkie Kid™
- Monster Fighters
- NEXO KNIGHTS™
- NINJAGO®
- Overwatch®
- Pirates
- Polybag - Mini készletek
- Power Functions
- Powered Up
- Scooby-Doo
- Sérült doboz
- Sonic the Hedgehog™
- Speed Champions
- Star Wars™
- Star Wars™ gyűjtői készletek
- Stranger Things
- Super Mario
- Technic
- The Legend of Zelda™
- THE LEGO® BATMAN MOVIE™
- Trollok®
- Ultimate Collector Series
- Ultra Agents
- Unikitty™
- VIDIYO™
- Wednesday
- Wicked
- Xtra
- További készletek
Értesülj elsőként a vásárláshoz járó ajándékokról, újdonságokról!

Elfogadom az adatvédelmi szabályzatot
JöhetTörlöm