3804 RCX 2.0: labdázós Acrobot

Ezt a naplót egyedül írta 13 éves fiam, és szerette volna, ha kiegészítés nélkül kerül publikálásra. Íme.

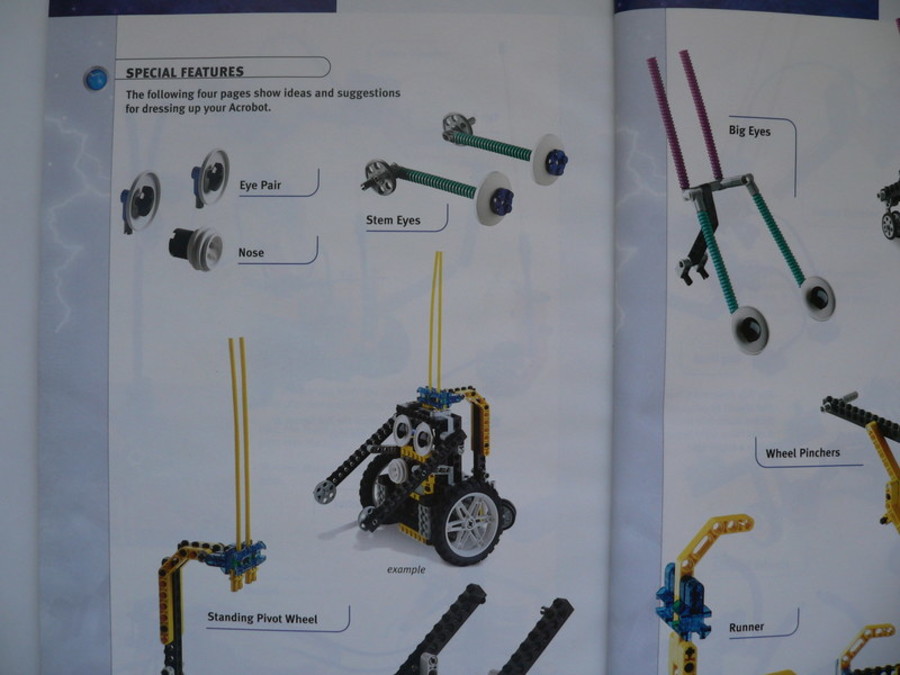
A RIS (Robotics Invention System) V2.0 készletből útmutató szerint három robot építhető. Ezen kívül még további hat robot rakható össze a programozó környezetben található instrukciók alapján. Viszont a készlet támogatja a saját tervezésű robotok építését, és ez abban is megnyilvánul, hogy minden útmutatóból megépíthető robot nem egy darabból áll, hanem különféle modulokból, és ezeket lehet kombinálni. Ezt fokozza még az, hogy az instrukció végén speciális tulajdonságok néven minden robothoz még néhány kiegészítőről is közölnek képeket. Egy ezek közül összeválogatott robotot fogok most bemutatni egyet.
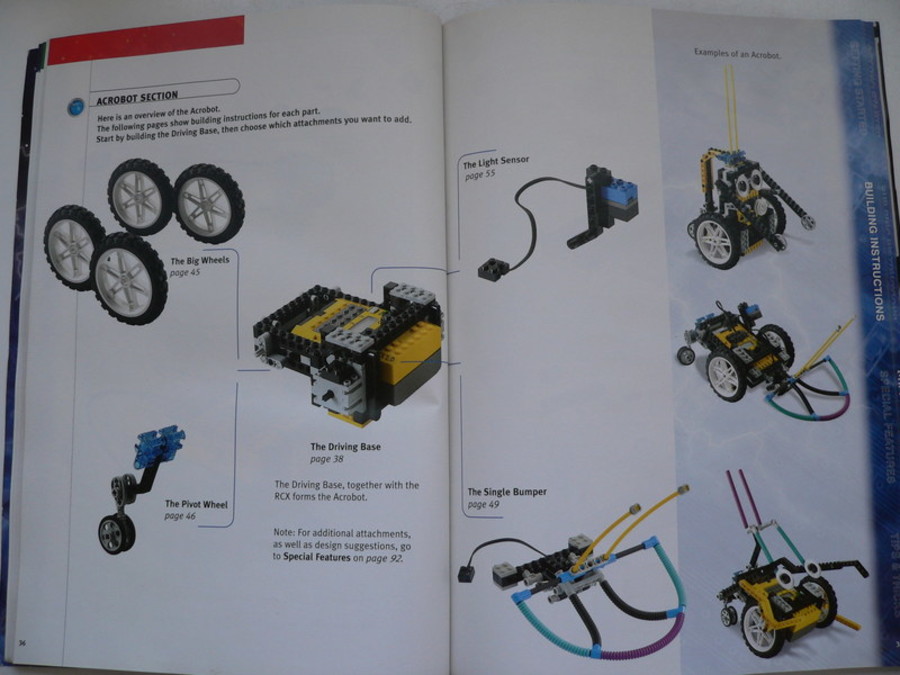
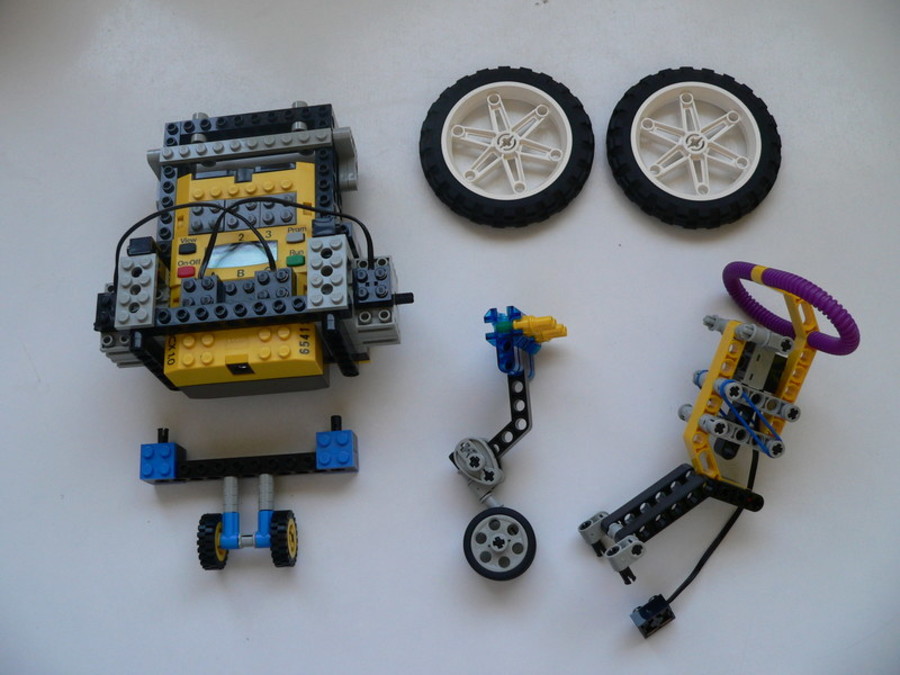
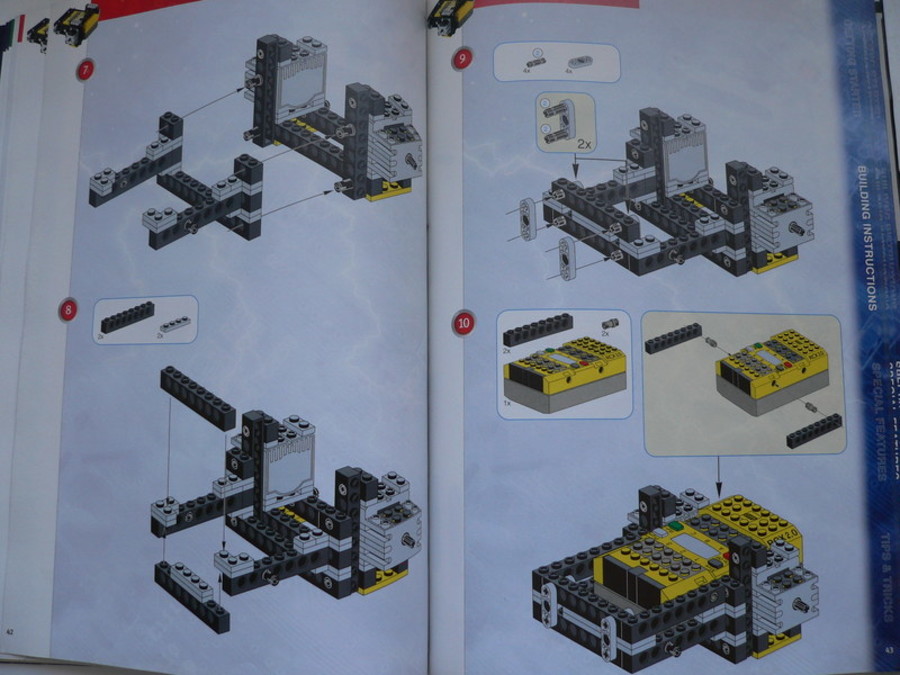
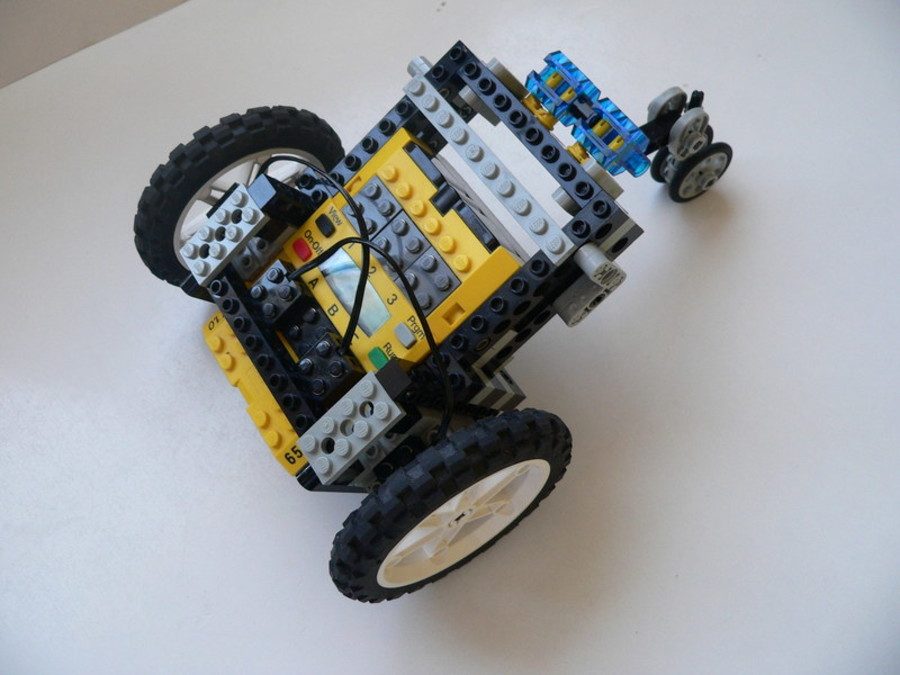
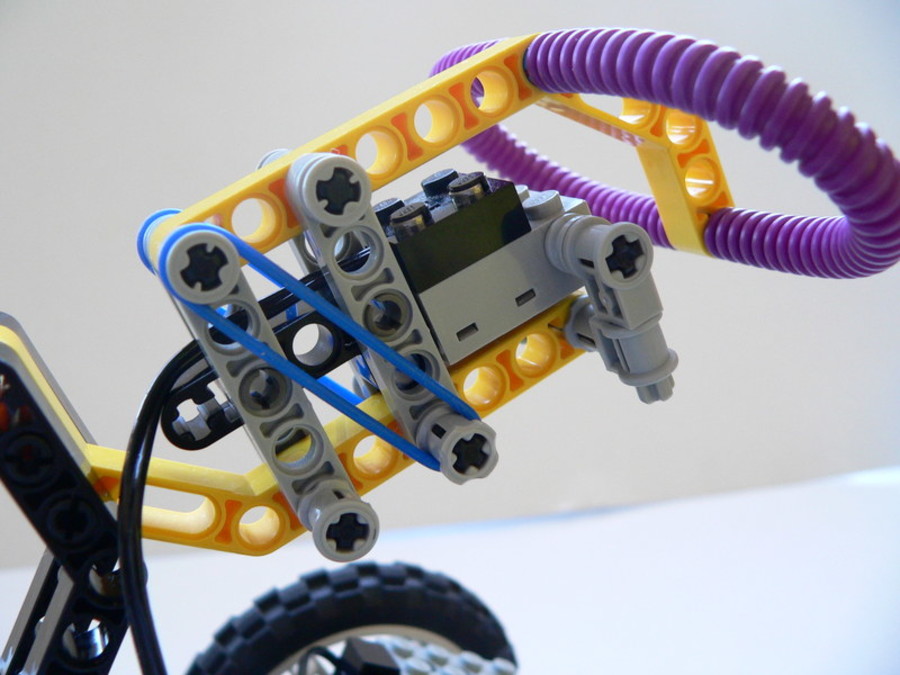
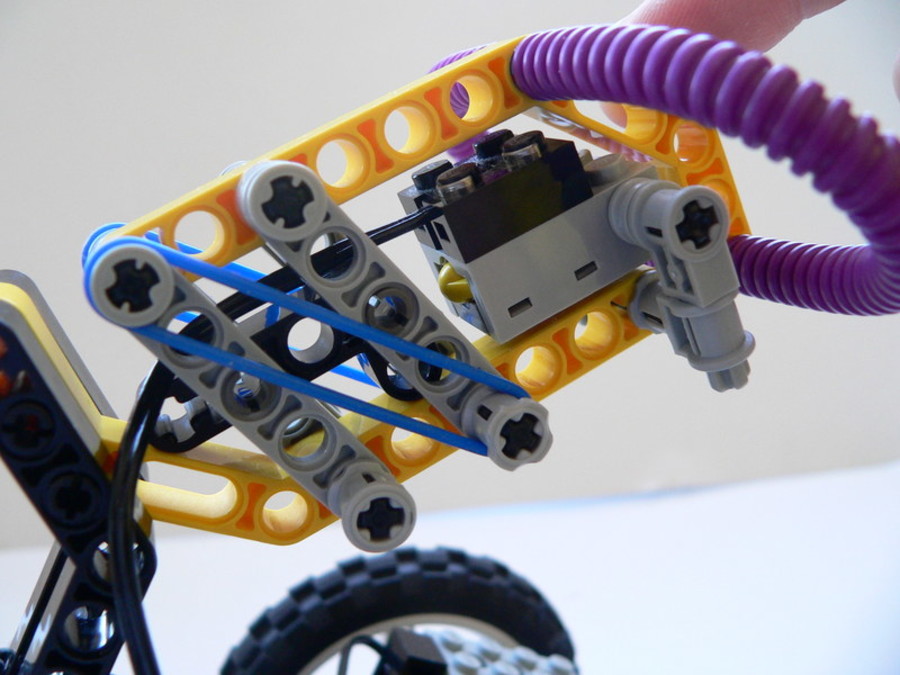
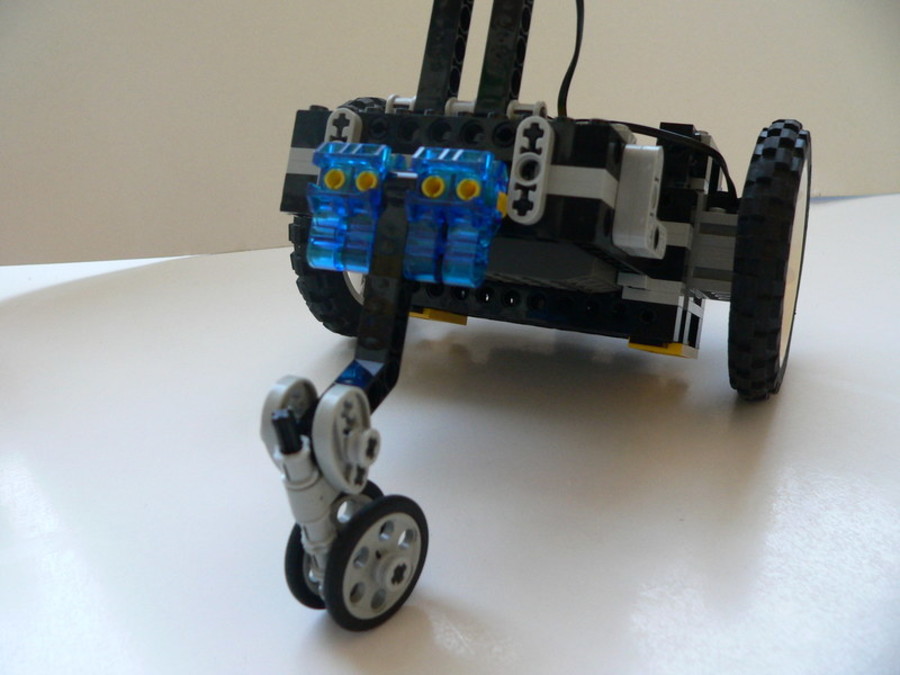
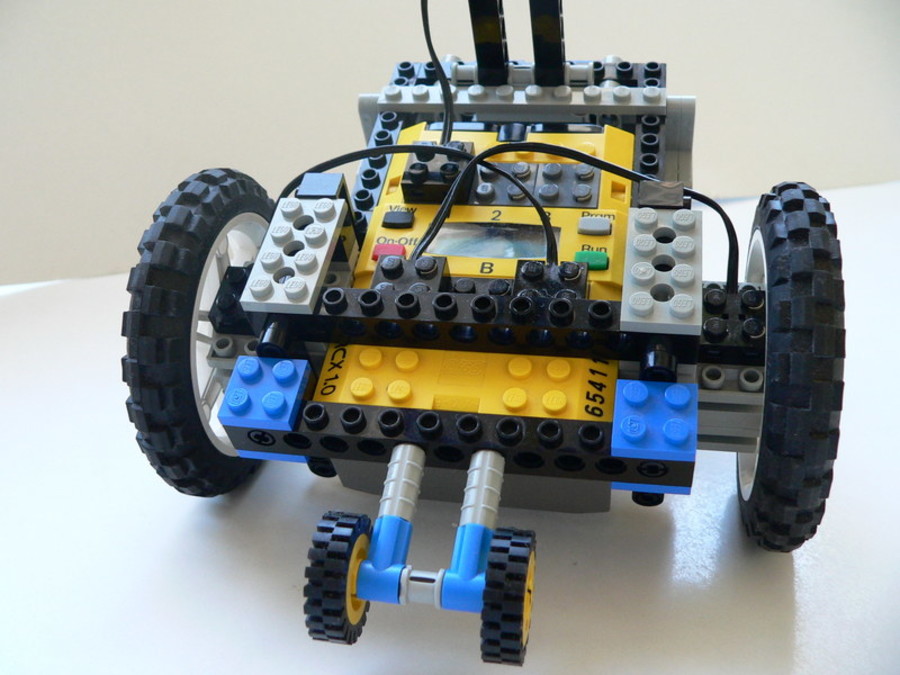
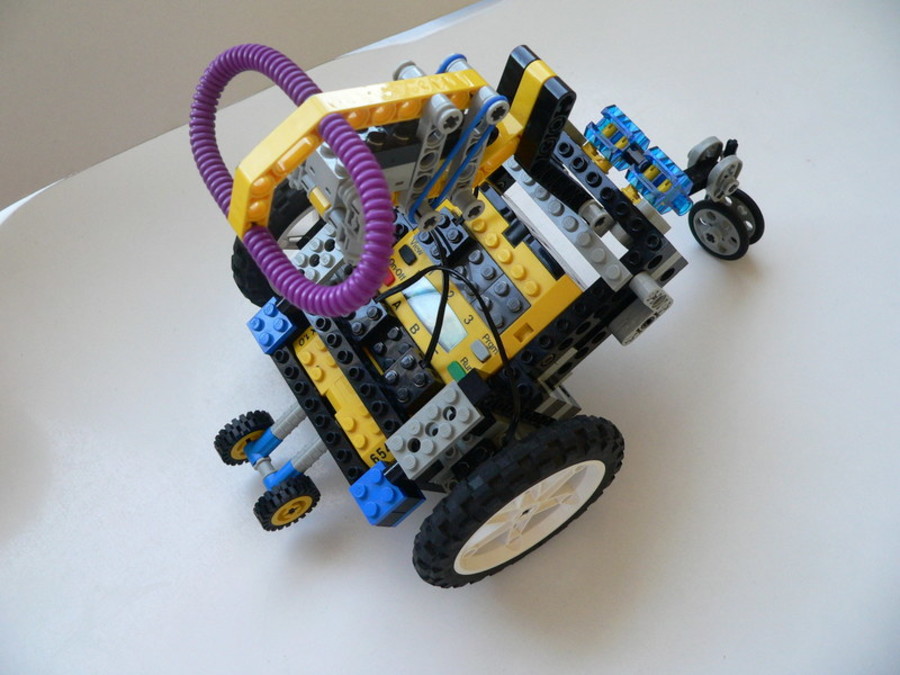
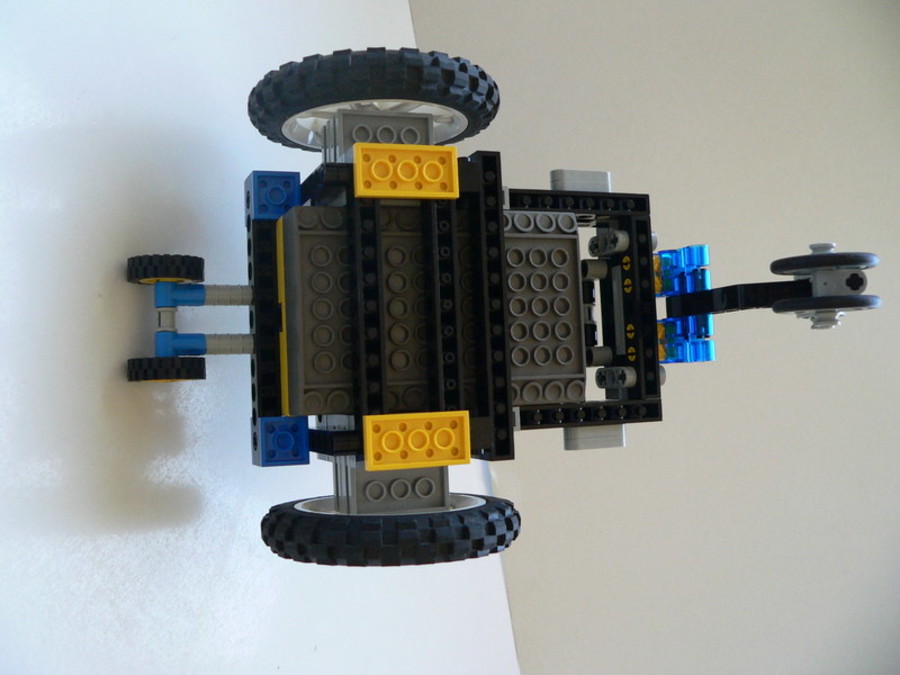
Ez a robot képes arra, hogy érzékelje, ha egy tárgy csapódik a tetején elhelyezett ütközőhöz, ezt regisztrálja, majd a programozásnak megfelelően reagál rá. Az alapja egy Acrobot fő modul, ehhez csatlakozik két "nagy kerék", egy "forgó kerék", és még a kép alapján megépíthetőek közül a "támogató kerék", valamint a "tető ütköző".
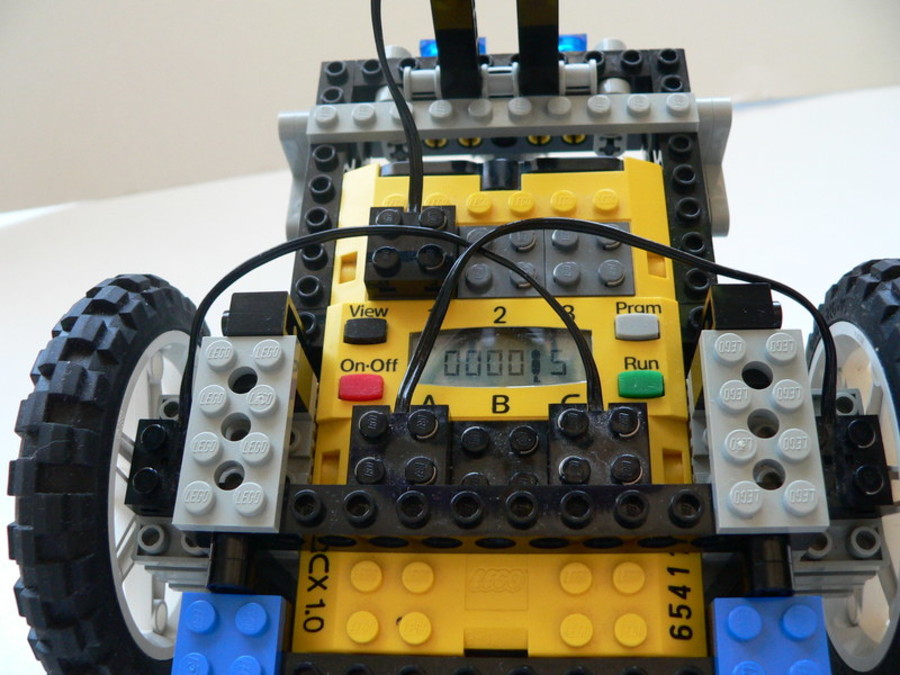
A robotról készítettünk egy videót, először ezt mutatom meg, aztán jön a program leírása.
A robot a program elindítását követően véletlenszerűen mozog össze-vissza. Háromszor kell eltalálni az ütközőjét, minden egyes találat után a találat sorszámának megfelelően csipog. A harmadik találat után megáll, zenél, majd leállítja a program futását.
Köszönöm a figyelmet!

2017 július 10, 21:36
- 2016 LEGO Újdonságok
- 2017 LEGO® Újdonságok
- 2018 LEGO® Újdonságok
- 2019 LEGO® Újdonságok
- 2020 LEGO® Újdonságok
- 2021 LEGO® Újdonságok
- 2022 LEGO® Újdonságok
- 2023 LEGO® Újdonságok
- 2024 LEGO® Újdonságok
- 60. évfordulós készletek
- Angry Birds
- Animal Crossing™
- Architecture
- Art
- Atlantis
- Avatar
- Bionicle
- Brick Sketches™
- BrickHeadz
- Chima
- City
- Classic
- Creator 3-in-1
- Creator Expert
- DC
- Disney Princess™
- Disney™
- DOTS
- DREAMZzz™
- DUPLO®
- Elves
- Fortnite™
- Friends
- Gabby babaháza
- Ghostbusters™
- Gyűrűk Ura
- Harry Potter™
- Hidden Side
- ICONS
- Ideas - CUUSOO
- Indiana Jones
- Juniors
- Jurassic World
- Kaland - LEGO Movie
- Karib tenger kalózai
- Kastély, LEGO Vár (Kingdoms)
- Large Models
- Lone Ranger
- Marvel
- MINDSTORMS®
- Minecraft™
- Minions®
- Mixels
- Monkie Kid™
- Monster Fighters
- NEXO KNIGHTS™
- NINJAGO®
- Overwatch®
- Pirates
- Polybag - Mini készletek
- Power Functions
- Powered Up
- Scooby-Doo
- Sérült doboz
- Sonic the Hedgehog™
- Speed Champions
- Star Wars™
- Star Wars™ gyűjtői készletek
- Stranger Things
- Super Mario
- Technic
- The Legend of Zelda™
- THE LEGO® BATMAN MOVIE™
- Trollok®
- Ultimate Collector Series
- Ultra Agents
- Unikitty™
- VIDIYO™
- Wednesday
- Wicked
- Xtra
- További készletek
Értesülj elsőként a vásárláshoz járó ajándékokról, újdonságokról!

Elfogadom az adatvédelmi szabályzatot
JöhetTörlöm