Programozott technic
Eszembe jutott, hogy egy másik saját fejlesztésű modellem is benevezem a heti feladatba, ez is az egyszerűség, kis elem szám és az összetett működés szempontjait figyelembe véve született. Érdekkes volt, hogy miután a járművet üzembe helyeztem, a Technicopedian tanulmányozni kezdtem a vezérlőhöz tartozó 1997-ben kiadott 8479 készletet és kiderült, hogy az egyik modellje pont ugyanezt tudja, csak kicsit precízebb, nagyobb elem számú megvalósításban :-)
Régóta érdekelt már, hogy milyen módon is programozható a CodePilot kontroller és hogy mire is képes. Kíváncsiságom oka az volt, hogy megtudtam, igazából ez volt az a vezérlő, amely megelőzte a Mindstorms vonal első okos tégláját, az RCX 1.0-át. Egy kis jármű vezérlésén keresztül ismerkedtem meg vele:

A vezérlőben 6 db ceruzaelem vagy akkumulátor biztosítja a tápellátást, balról jobbra haladva a következő funkciójú elemeket tartalmazza: piros kör alakú gomb, amellyel a programozási folyamatot lehet elindítani, alatta a vonalkód szkenner, ami egyben forgásérzékelő is egy speciális lego kerék használata esetén, ez a vezérlő egyik bemenete, amely programunkban egy feltételként szerepelhet. Az ívelt végű, hosszú zöld nyomógomb a (motor vezérlő) kimenet pillanatnyi bekapcsolására alkalmas, ezzel lehet tesztelni az építményünket, hogy a motorizálás hogyan is fog működni majd, ha a program már fut. A zöld háromszög a program indítására szolgál, a piros négyzet a stop és egyben kikapcsoló gomb. Van egy piros LED, ami programkódok beolvasáskor világít és egy zöld, ami program futása közben. A fekete 2x2-es elektromos csatlakozóra köthetünk motort, Sound&Light szirénát vagy izzót, ez a vezérlő egyik kimenete, a másik egy hangszóró, amely a Code Pilot felirat felett van és előre definiált hangok megszólaltatására alkalmas, mint az autó vagy helikopter hang, illetve egy oktávnyi zenei hang is a rendelkezésünkre áll a félhangokkal együtt, én első próbálkozásaim alkalmával gyorsan betanítottam a vezérlőnek a közismert Boci-Boci tarka c. gyermekdalt, zenei vénám nem túl erős, ez volt a csúcs, amit produkálni bírtam fejből :-) Végül a sárga 2x2-esre csatlakoztathatjuk a Touch szenzort, amelyből a Barcode Multiset készlet kettőt is tartalmazott, hiszen párhuzamosan kötve a program során akár két (vagy több) különféle feltételt is érzékelhet.
Visszatérve az általam épített járműhöz, egy motor működteti, amely a kerekek meghajtását végzi egy 8 - 24-es és a differenciálmű lassító áttételein keresztül, illetve meghajtást biztosít a kormányműnek, amely elmozdulási tartománya az egyenes menettől a teljesen alászedett balra kanyarodásig terjed.

A motor a kormányzást szintén két lassításon keresztül mozgatja, de ezek közül a második fokozat egy gumiszíj áttétel, amely el tud csúszni, amikor előre haladva az egyenes menetbe fordult a kormány, illetve hátramenet esetén teljesen balra mozdult ki az. Az alábbi videón ez a működés jól látható:
A járművet a 8064-es készlet elemeiből raktam össze, egy differenciálművet kellett csak hozzátennem, mert a kormányzás a nélkül nem menne ilyen szépen. A másik behozott a lökhárító sárga studless elemei, ezek nélkül csak aránytalanul nagy megoldásokat sikerült összehoznom.

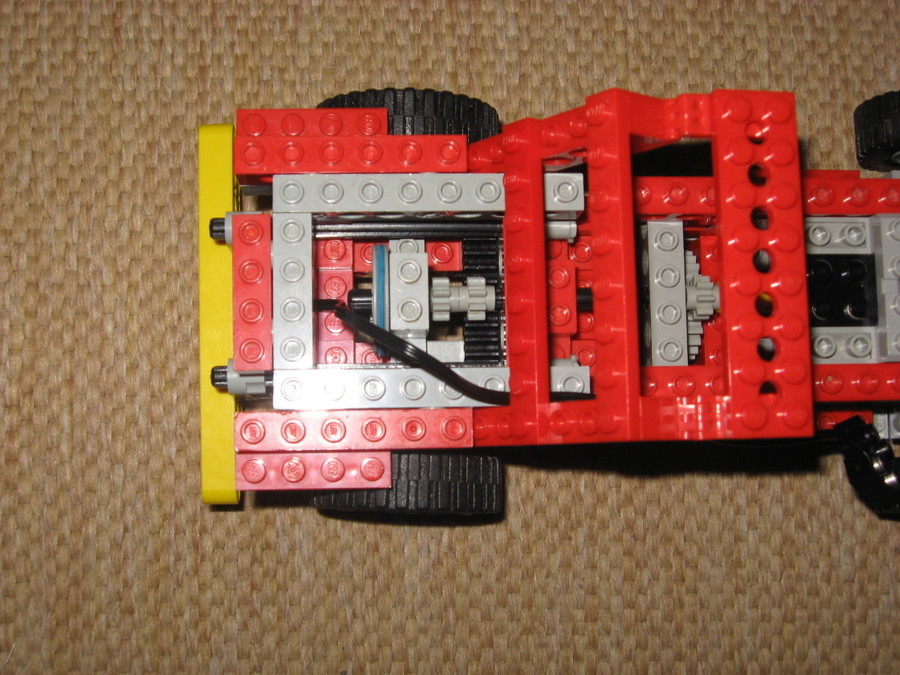
Alább látszik, hogy a lökhárító elmozdulását két hosszanti tengely teszi lehetővé, jó távol egymástól és szép hosszan megvezetve, így nem szorul meg:

Alábbi képen a Touch szenzor elhelyezése és működtetése látható, mindegy milyen irányból nyomódik be a lökhárító, a kis szürke alkatrész mindenképpen működésbe hozza a kis kapcsolót:

A vezérlőt nem lehet másképpen rögzíteni, mint egy keret segítségével, szerencsére maradt még elegendő hosszú elem, hogy ezt is össze lehessen hozni, a következő lépésekben készült a kis teherautó végleges formájára:



Amikor a jármű elkészült, már csak a programozás volt hátra. Eredetileg a készletben szép színes lapok voltak mellékelve, de azt én nem kaptam meg a használtan beszerzett vezérlőhöz, be kellett érnem az internetről letölthető egyszerű, fekete-fehér pdf dokumentummal, aminek előnye, hogy olcsón reprodukálható. Azért érdemes megnézni a régi kódtáblázatot is:
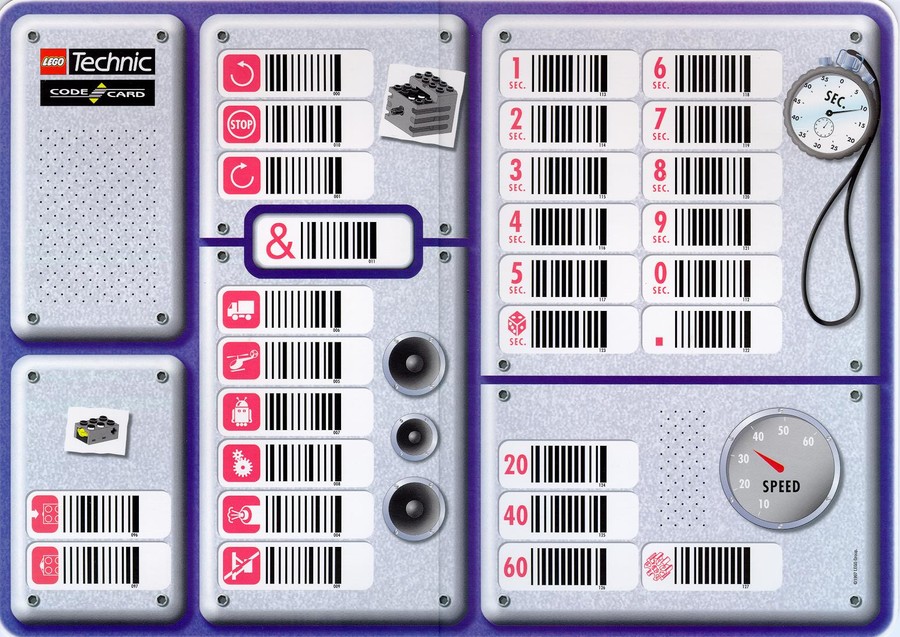
Az általam "szkennelt" program a következő:
Motor előre és "Teherautó" hang –Ha Touch szenzor "On" - Motor STOP - "Pneumatika hang" - Várakozás 0.5 s - Motor hátra és "Teherautó hang" - 4 sec-ig - Motor STOP - "Pneumatika" hang - Várakozás 0.5 s
Az irányváltások közötti 0.5 sec-ra azért volt szükség, hogy a kis fogaskerekek kevésbé legyenek terhelve, először ezt kihagytam, és a hirtelen irányváltástól recsegtek a diffi kis fogaskerekei. A vezérlő úgy van kitalálva, hogy automatikusan ismétli a programot egy végtelen ciklusban, így az a végéhez érve az elejére ugrik, így a jármű folyamatosan teszi a dolgát, ahogy az az alábbi videón is látható:
Köszönöm, hogy elolvastad!
2016-05-08


2016 május 8, 21:40
- 2016 LEGO Újdonságok
- 2017 LEGO® Újdonságok
- 2018 LEGO® Újdonságok
- 2019 LEGO® Újdonságok
- 2020 LEGO® Újdonságok
- 2021 LEGO® Újdonságok
- 2022 LEGO® Újdonságok
- 2023 LEGO® Újdonságok
- 2024 LEGO® Újdonságok
- 60. évfordulós készletek
- Angry Birds
- Animal Crossing™
- Architecture
- Art
- Atlantis
- Avatar
- Bionicle
- Brick Sketches™
- BrickHeadz
- Chima
- City
- Classic
- Creator 3-in-1
- Creator Expert
- DC
- Disney Princess™
- Disney™
- DOTS
- DREAMZzz™
- DUPLO®
- Elves
- Fortnite™
- Friends
- Gabby babaháza
- Ghostbusters™
- Gyűrűk Ura
- Harry Potter™
- Hidden Side
- ICONS
- Ideas - CUUSOO
- Indiana Jones
- Juniors
- Jurassic World
- Kaland - LEGO Movie
- Karib tenger kalózai
- Kastély, LEGO Vár (Kingdoms)
- Large Models
- Lone Ranger
- Marvel
- MINDSTORMS®
- Minecraft™
- Minions®
- Mixels
- Monkie Kid™
- Monster Fighters
- NEXO KNIGHTS™
- NINJAGO®
- Overwatch®
- Pirates
- Polybag - Mini készletek
- Power Functions
- Powered Up
- Scooby-Doo
- Sérült doboz
- Sonic the Hedgehog™
- Speed Champions
- Star Wars™
- Star Wars™ gyűjtői készletek
- Stranger Things
- Super Mario
- Technic
- The Legend of Zelda™
- THE LEGO® BATMAN MOVIE™
- Trollok®
- Ultimate Collector Series
- Ultra Agents
- Unikitty™
- VIDIYO™
- Wednesday
- Wicked
- Xtra
- További készletek
Értesülj elsőként a vásárláshoz járó ajándékokról, újdonságokról!

Elfogadom az adatvédelmi szabályzatot
JöhetTörlöm