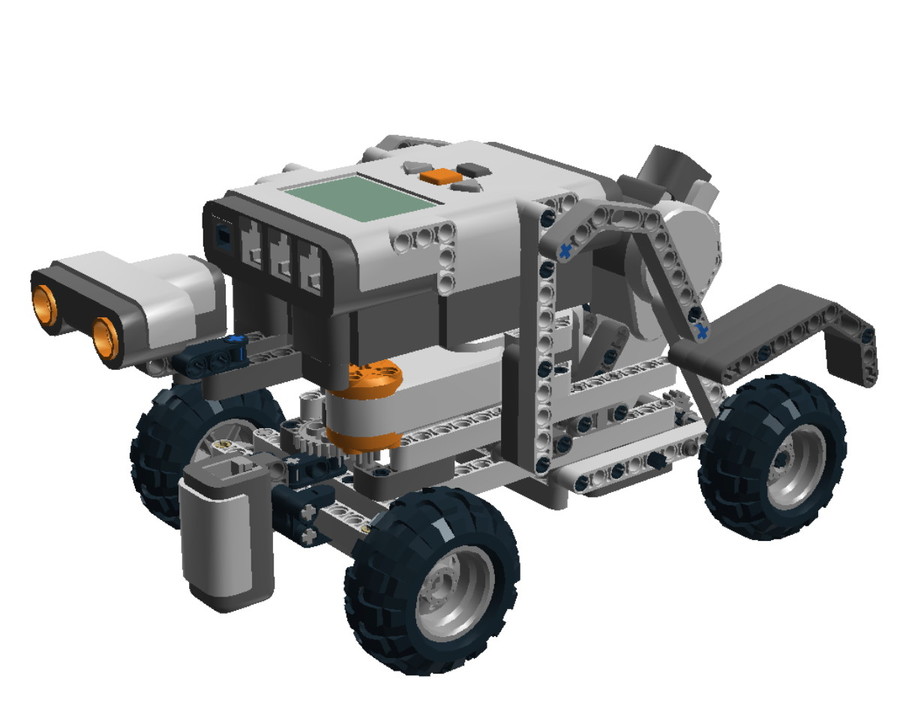
4 kerekű vonalkövető
Sok vonal követő járművet építettem már a Mindstorms készleteimből, de mindegyik hernyótalpas volt, ilyenek mint ez itt:
Ezek szerkezeti felépítése nem túl bonyolult, a hernyótalpak miatt képes a tömegközéppontjának függőleges tengelye körül helyben fordulni, ha a fény érzékelő kellően távol van ettől a forgástengelytől és sikerül egy nem túl durván beavatkozó algoritmust írni, akkor akár egy óra alatt is megszületik a siker és a robotunk szépen teszi a dolgát, ahogy elképzeltük. A tengelycsonk kormányzás már egy teljesen más viselkedésű járművet eredményez, helyben fordulás kizárt, így a kormányzásnak, a pályának és a fényérzékelő (a robot szeme) elhelyezésének bizonyos geometriai kritériumai vannak. Ott indul, hogy a megalkotott guruló jármű fordulókörének átmérője kisebb kell legyen, mint a tesztpálya legkisebb átmérője. A másik fontos kérdés, hogy hová helyezzük el a fényérzékelőt, hogy az észlelt változás és a beavatkozás a vezérlő számára megfelelő visszacsatolással legyen kiváltható és egyben érzékelhető, na első nekifutásra nem is sikerült működő megoldást alkotnom, pedig jól nézett ki :-D
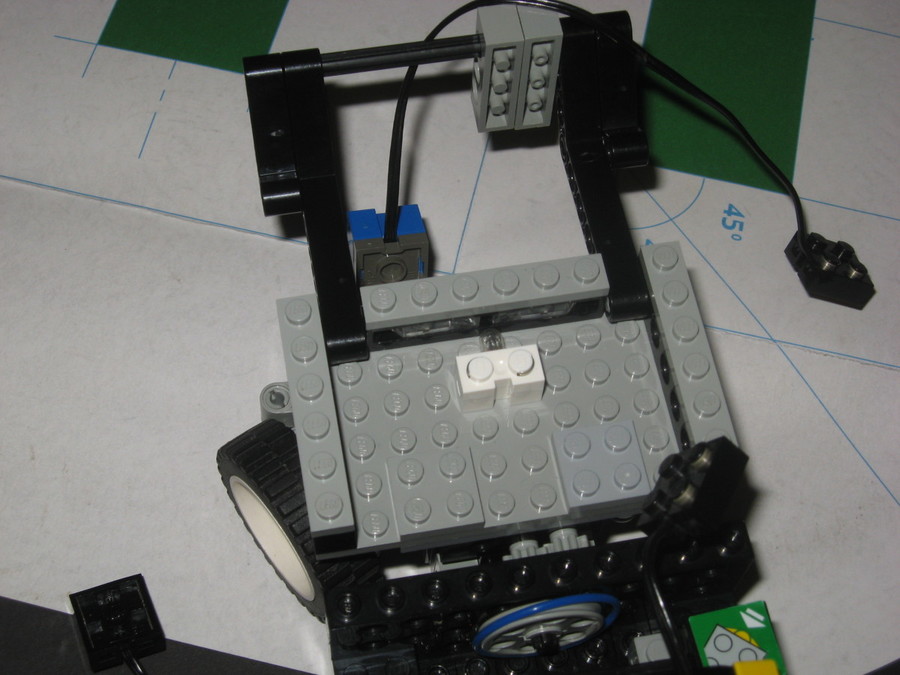
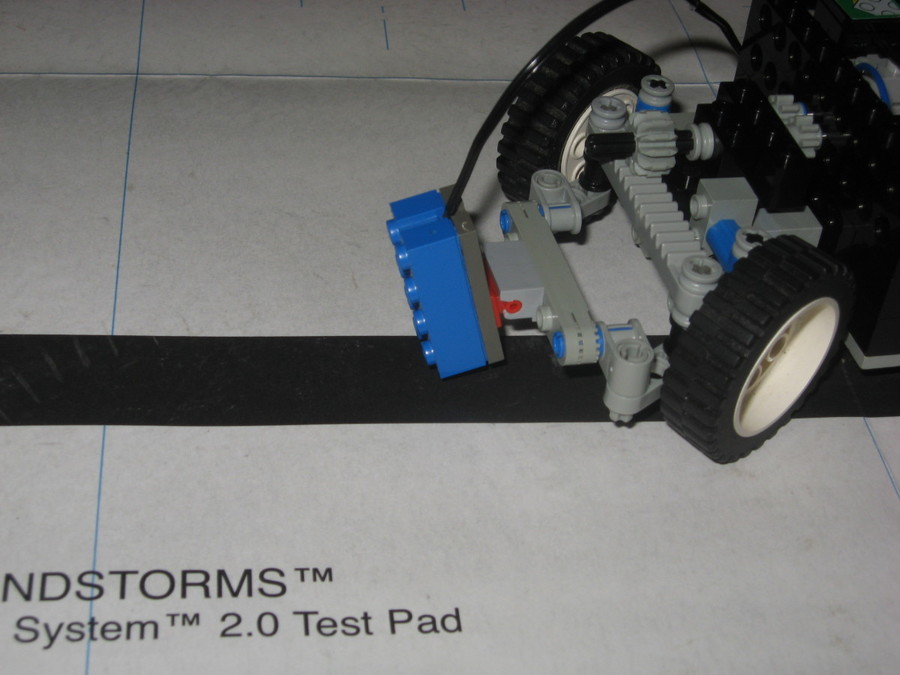
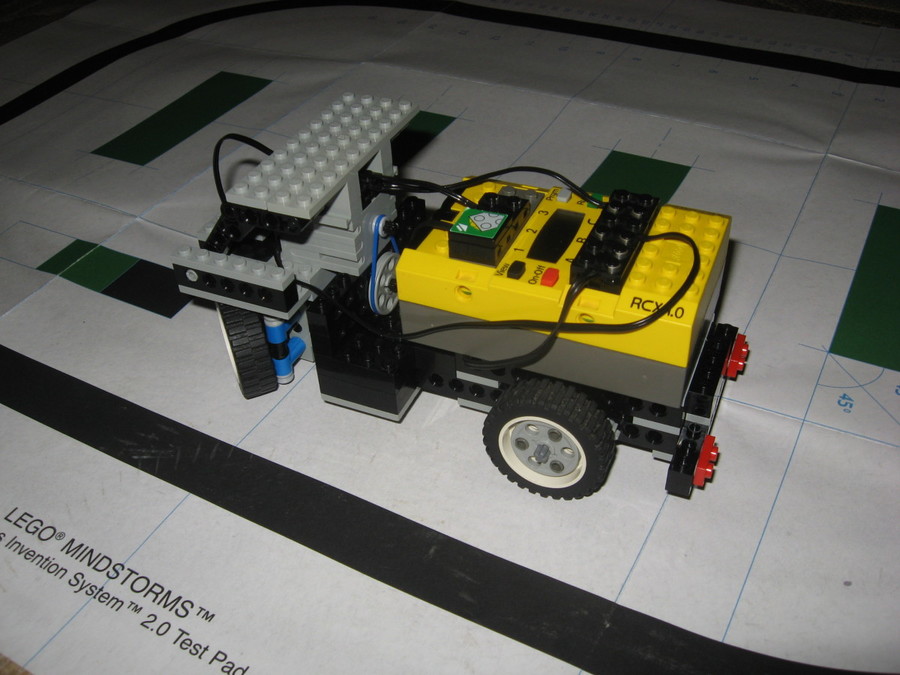
Azt hiszem itt az okozta a sikertelenséget, hogy a kormányösszekötő rövid kormánykarokra volt ráépítve, így amikor a motor mozdított a kormány állásán, a szenzor csak nagyon keveset mozdult el, így a jármű túlzott kormánymozdulatokat tett, a mostani konstrukciónál ezen változtattam, látszik a meghosszabbított kormánykar, amin egy második összekötő van, amely a fényszenzort hordozza:
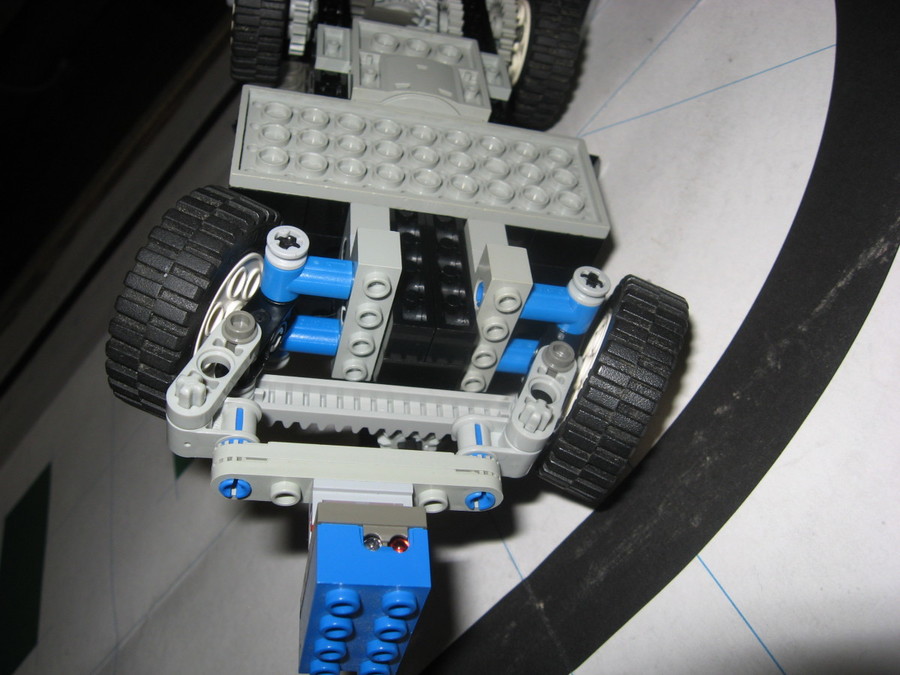
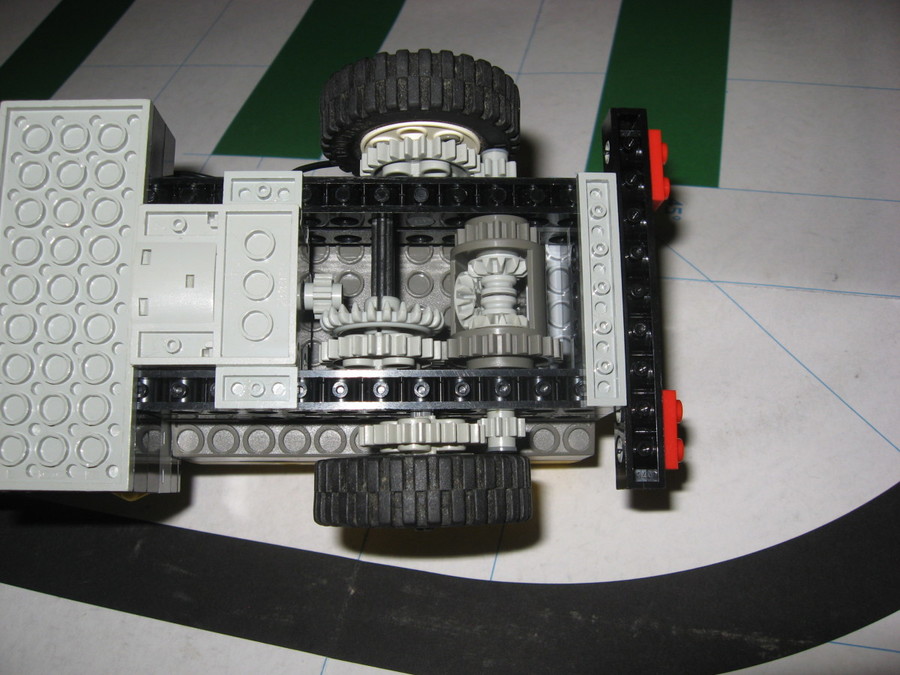
Itt a technic korabeli kormány megoldását nem tudtam alkalmazni, mert nem volt alkalmas kis fordulókörű szerkezet megalkotására, így újabb alkatrészt is be kellett építenem, a készletnél ugyan nem újabb az a 3 lyuk hosszú, fekete, két végén kereszthornyú, középen 90 fokkal elfordított síkban hengeres lyukkal ellátott alkatrész, a RIS 2.0 készlet azonban nem tartalmazta még. Ez alkalmas igazán jó kormányszerkezetek megalkotására, a kerék csapjának megfogatása egy egyedi megoldásban valósult meg a kék alkatrészek segítségével.
Kis kormány elmozdulás kellően nagy fényszenzor kitérést okoz, így az autó nem lesz túlkormányozva. Itt még egy apró trükk látható, a kormány meghajtása kicsit fékezett, a kék gumi előtt látszik két 8 fogú fogaskerék, ebből az egyik egy kék, szoros illesztésű csappal van a technic kockába pattintva, ez is gátolja, hogy a motor túlzottan nagy kitéréseket tudjon okozni beavatkozáskor, kicsit feszesebb a szerkezet általa, amit a motor nyomatéka simán képes leküzdeni, de pl. áram elvételekor a szerkezet a forgó részek lendülete által nem mozdul tovább (PF M motoros kormányzásnál is hasznos ez a kis fékezés).
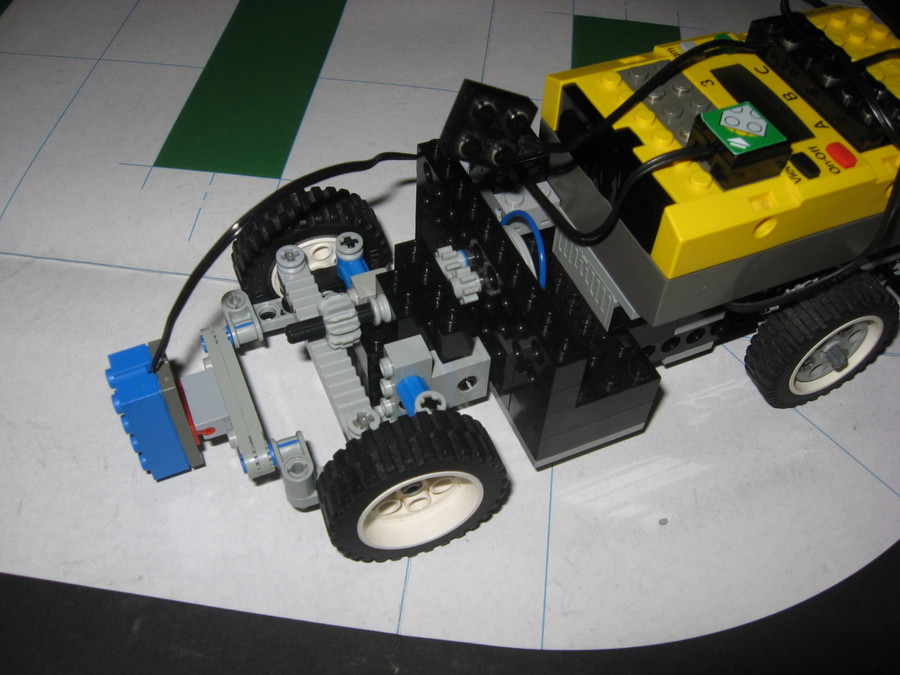
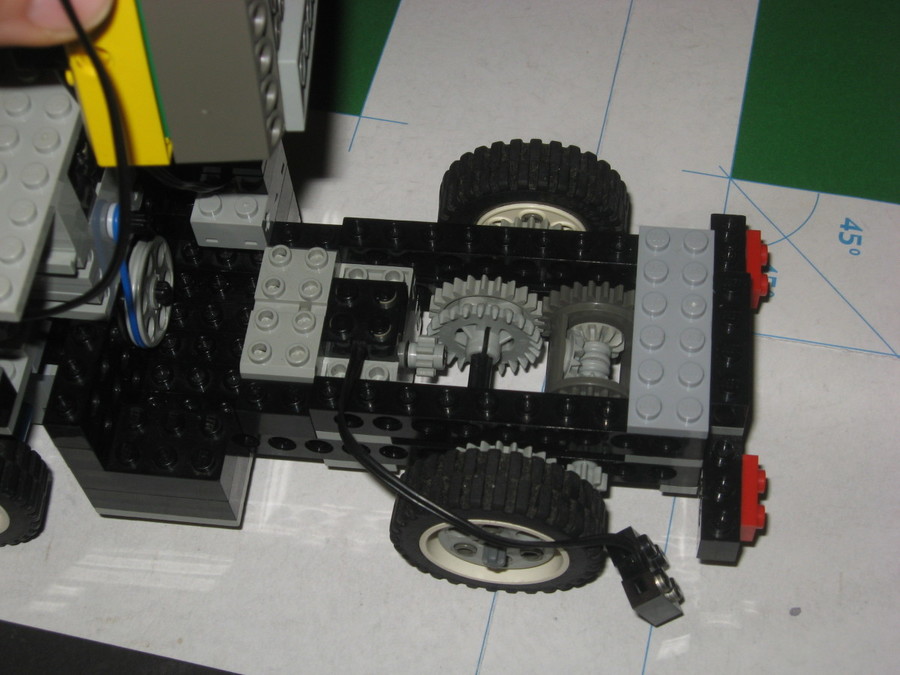
Fontos a sebesség is, hiszen adott egy beavatkozási dinamika a kormányzásnál, ha a sebesség túl nagy, akkor nem sikerül pályán tartani a járművet, kis sebesség ilyen gondot nem okoz. Elsőre sikerült túl fürge meghajtást építenem, amit a kerekeknél még egy lassító áttétellel le kellett lassítanom, hogy az összhang kialakuljon:
Elsőre a diffiből kijövő tengelyekre kerültek a kerekek, utána a kis fogaskerekek váltották fel őket, előnye lett ennek a megoldásnak a rövidebb tengelytáv, ami a kisebb fordulókört elősegíti. Viszonylag kompakt lassú és erős kis hajtómű lett a végeredmény. Az erő a teljes alá kormányozottságnál szükséges is!
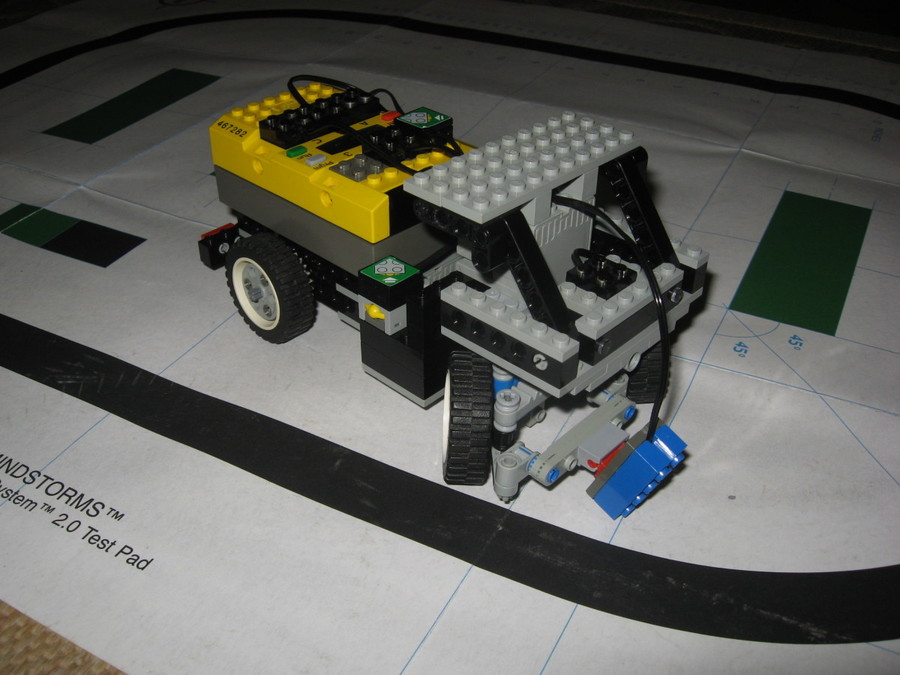
Bekerült egy kis extra, egy régi mozdony világítás a 9 V-os fémsines vonatok idejéből, mivel a vezérlőnek 3 kimenete van, így a kormányzás és a meghajtás mellé még ez is befért önálló vezérléssel:
A lámpa előtt, a szürke 1x6-os plate alatt láthatóak a prizmák is, egy izzó két világító lámpát működtet általuk, aranyos kiegészítők voltak ezek!
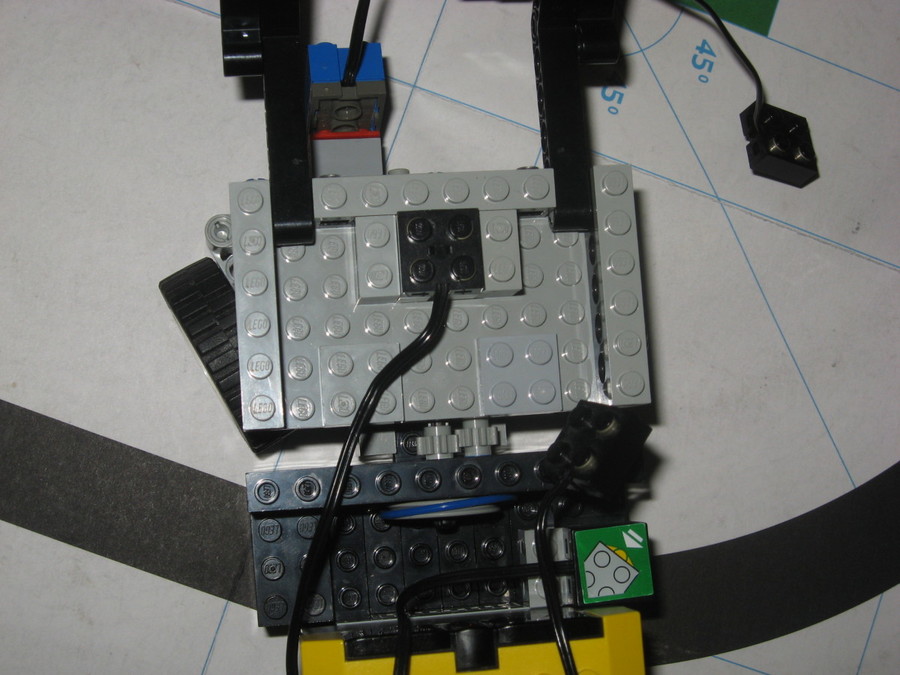
A CodePilot-ból származó matricázott csempéket tettem az érintés érzékelő elektromos 2x2-es kockáira:

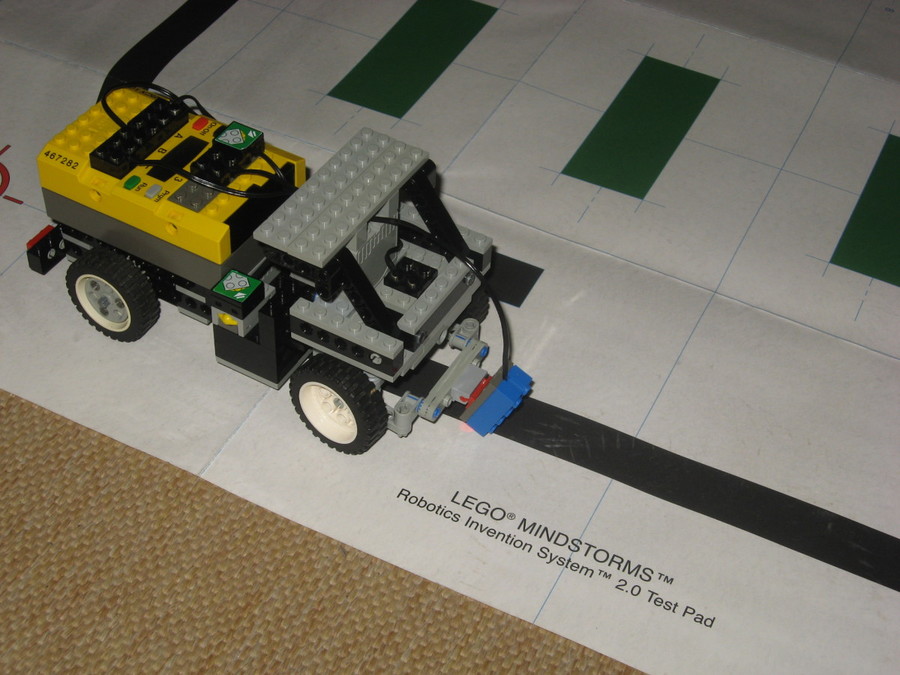
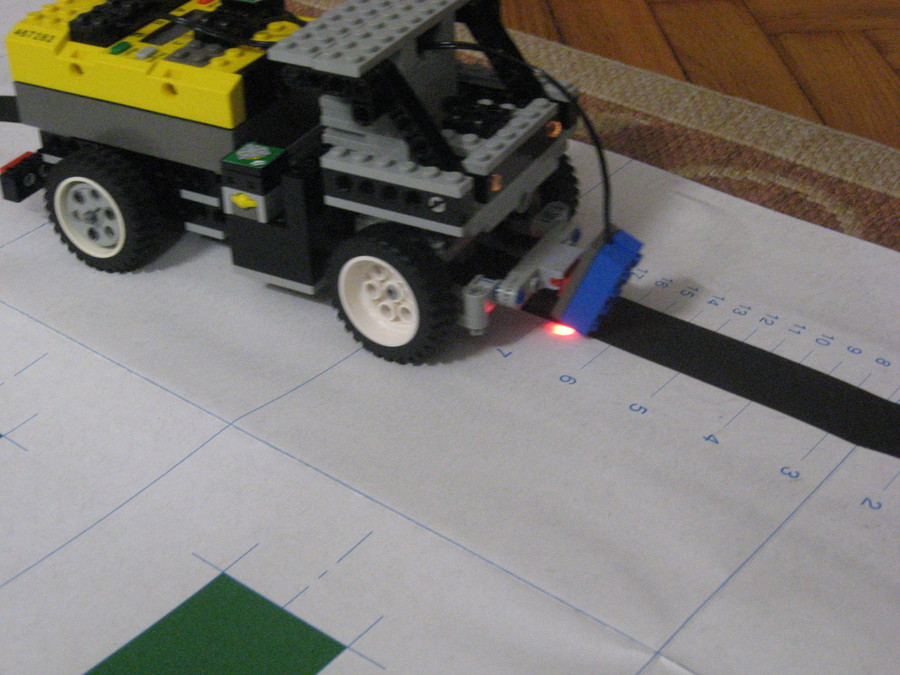
A kis nyomógomb első megnyomása rögzíti a fehér papír fény értékét, a második megnyomás a fekete vonal fény értékét, míg a harmadik megnyomás elindítja a járművet, ismételt lenyomás megszakítja a program futását:
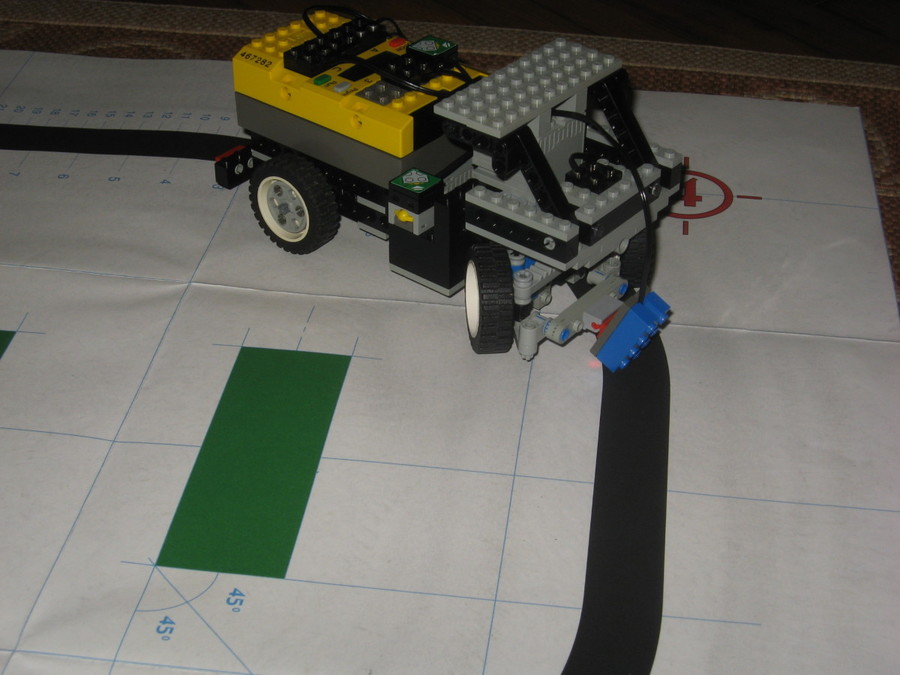
A jármű egy kormány középre állítással kezdi a programját, az aktuális fényviszonyokhoz történő "kalibrálás" ezt követi, aztán már mehet is a kis "teherautó" :-)
Még egy érdekes tapasztalat, amiért a fényérzékelő nem merőleges a felületre, hanem egy 2x2-es csuklós brick segítségével jól láthatóan meg lett billentve: a jelzett fény értéke függ a felület színétől és a tükrösségétől. Előfordul, hogy egy sötét felületról is közel olyan értéket ad a szenzor, mint egy világosról. Ha megdöntjük az érzékelőt, akkor a fényforrásából származó fény nem tükröződik vissza a fotodiódába, hanem annak csak a szórt fénye jut oda, ez sokkal árnyaltabb információt szolgáltat. Merőlegesen két szín (pl. sárga és fekete) különböztethető meg, döntött szenzor esetén 3, jó esetben 4 szín állapot is elkülöníthető. Ez a szenzor még nem szín érzékelő(!), csak fény intenzítást érzékel, az NXT 2.0-ban jelent meg az első RGB szenzor!
Köszönöm, hogy elolvastad!
2017-04-08
2017 április 8, 22:42
- 2016 LEGO Újdonságok
- 2017 LEGO® Újdonságok
- 2018 LEGO® Újdonságok
- 2019 LEGO® Újdonságok
- 2020 LEGO® Újdonságok
- 2021 LEGO® Újdonságok
- 2022 LEGO® Újdonságok
- 2023 LEGO® Újdonságok
- 2024 LEGO® Újdonságok
- 60. évfordulós készletek
- Angry Birds
- Animal Crossing™
- Architecture
- Art
- Atlantis
- Avatar
- Bionicle
- BOOST
- Brick Sketches™
- BrickHeadz
- Chima
- City
- Creator 3-in-1
- Creator Expert
- Dino
- Disney™
- DOTS
- DREAMZzz™
- DUPLO®
- Elves
- Friends
- Gabby babaháza
- Galaxy Squad
- Ghostbusters™
- Gyűrűk Ura
- Harry Potter™
- Hero Factory
- Hidden Side
- ICONS
- Ideas - CUUSOO
- Indiana Jones
- Juniors
- Jurassic World
- Kaland - LEGO Movie
- Karib tenger kalózai
- Kastély, LEGO Vár (Kingdoms)
- Large Models
- Lone Ranger
- MINDSTORMS®
- Minecraft™
- Minions®
- Mixels
- Monkie Kid™
- Monster Fighters
- NEXO KNIGHTS™
- NINJAGO®
- Overwatch®
- Pirates
- Polybag - Mini készletek
- Power Functions
- Powered Up
- PowerPuff Girls
- Prince of Persia
- Racers
- Scooby-Doo
- Sérült doboz
- Sonic the Hedgehog™
- Speed Champions
- Spongyabob
- Star Wars™
- Star Wars™ gyűjtői készletek
- Stranger Things
- Super Heroes
- Super Mario
- Technic
- THE LEGO® BATMAN MOVIE™
- TiniNindzsa
- Toy Story
- Trollok®
- Ultimate Collector Series
- Ultra Agents
- Unikitty™
- Verdák
- VIDIYO™
- World Racers
- Xtra
- További készletek
Értesülj elsőként a vásárláshoz járó ajándékokról, újdonságokról!

Elfogadom az adatvédelmi szabályzatot
JöhetTörlöm